1.本实用新型属于炮管清洁技术领域,具体涉及一种炮管擦拭机器人。
背景技术:
2.擦拭炮管是炮兵分队保养和维护火炮工作中的一项重要内容,是延长火炮寿命、保障火炮射击安全和射击精度的一项重要工作。炮管洗把刷是擦拭炮管的专用工具,主要用来与炮管擦拭剂配合清除炮管内的挂铜、火药残渣、油垢,防止炮管阻塞、锈蚀和磨损。
3.目前,我军炮兵装备的各类型火炮都配备有简易洗把刷,使用这种洗把刷擦拭炮管时,需要反复从炮管内取出洗把刷,沾上炮管擦拭剂后放入炮管内逐段反复捅擦炮管,直至用完配好的擦拭剂。这种擦拭方式费时费力,而且难以保障每次擦拭的清洁度,同时擦拭剂均为强酸、强碱的化学试剂,对身体也具有一定的损害。
技术实现要素:
4.本实用新型的目的在于提供一种炮管擦拭机器人,克服了现有技术的不足,采用智能控制的方式控制机器人对炮管内部进行擦拭,程序化的操作保障每次擦拭的清洁度,提高炮管擦拭的效率,同时避免清洗液对身体的损害。
5.为解决上述问题,本实用新型所采取的技术方案如下:
6.一种炮管擦拭机器人,包括
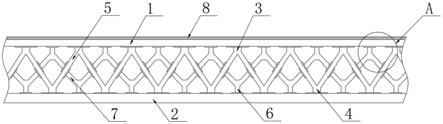
7.前端执行机构,包括执行油缸、油管、驱动电机和毛刷头,所述油管设置在执行油缸的一侧且一端与执行油缸连接,所述驱动电机安装在执行油缸的一端,且毛刷头安装在驱动电机的输出轴上,所述毛刷头上设置有若干均匀分布的毛刷杆;
8.液压动力站,包括主体、控制终端、嵌设在主体上的显示屏和多个控制开关,所述主体内设置有多个控制液压回路的电磁换向阀、单向阀、调压阀和电磁卸荷阀,且安装有用于驱动油泵的油泵电机组,所述控制终端用于接收控制开关的信号,并根据信号对油泵电机组、电磁换向阀、单向阀、调压阀和电磁卸荷阀进行调节。
9.进一步,所述执行油缸的外侧设置有杆前端抱紧器、缸前端抱紧器和缸后端抱紧器,所述执行油缸的一侧设置有导向杆,所述导向杆的一端与杆前端抱紧器固定连接,另一端依次贯穿缸前端抱紧器和缸后端抱紧器。
10.进一步,所述缸后端抱紧器上开设有可封闭的清洗液注入口,且清洗液通过管道输送至杆前端抱紧器,所述杆前端抱紧器靠近毛刷头的一侧表面设置有清洗液的喷射机构。
11.进一步,所述杆前端抱紧器上安装有高清摄像头,用于拍摄炮管内壁的影像并传输至控制终端,最终显示在显示屏上。
12.进一步,所述执行油缸远离毛刷头的一端设置有用于监测执行油缸伸长量的位移传感器,所述位移传感器通过导线与控制终端连接。
13.进一步,所述主体内还安装有用于实时检测前端执行机构执行结果的压力传感器
和用于提高散热量的散热风扇,且主体的底端安装有多个移动轮。
14.本实用新型与现有技术相比较,具有以下有益效果:
15.本实用新型所述一种炮管擦拭机器人,结构设计新颖、操作简单便捷;采用智能控制的方式控制机器人对炮管内部进行擦拭,程序化的操作保障每次擦拭的清洁度,提高炮管擦拭的效率,同时避免清洗液对身体的损害。
附图说明
16.图1为一种炮管擦拭机器人中前端执行机构的结构示意图。
17.图2为一种炮管擦拭机器人中液压动力站的结构示意图。
18.图3为一种炮管擦拭机器人中电气控制原理结构框图。
19.图中:1、毛刷头;2、驱动电机;3、杆前端抱紧器;4、高清摄像头;5、缸前端抱紧器;6、执行油缸;7、导向杆;8、油管;9、清洗液注入口;10、缸后端抱紧器;11、位移传感器;12、主体;13、移动轮;14、控制开关;15、显示屏。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.如图1
‑
3所示,本实用新型所述一种炮管擦拭机器人,包括
22.前端执行机构,包括执行油缸6、油管8、驱动电机2和毛刷头1,油管8设置在执行油缸6的一侧且一端与执行油缸6连接,驱动电机2安装在执行油缸6的一端,且毛刷头1安装在驱动电机2的输出轴上,毛刷头1上设置有若干均匀分布的毛刷杆,毛刷头1通过卡接、螺纹等方式可拆卸连接在驱动电机2的输出轴上,且毛刷头1分为磨料尼龙刷、马毛刷、线刷三种,磨料尼龙是
23.以尼龙中加入碳化硅或氧化铝磨料颗粒后的合成丝,也称磨料丝或研磨丝,其制成的毛刷成品具有耐磨的特性,可用于火炮射击后的清理工作。马毛的柔软度适中,韧性好,耐磨损,但不耐酸碱,多用于火炮身管内部的清洁、除尘、保养等。线刷较软,易变形,多用于火炮身管内部的死角的除尘工作。火炮身管日常的维护、保养、擦试清理工作仅需要马毛刷和线刷即可完成。火炮射击后的擦试清理需要使用三种毛刷进行火炮射击后的擦试清理过程为:火炮身管冷却后向身管内部喷涂除铜剂,浸泡一段时间后,用磨料尼龙刷对火炮身管内部进行擦试清理;使用马毛刷对火炮身管内部进行擦试清理;使用线刷对火炮身管内部进行擦试清理、涂抹防锈油。
24.液压动力站,包括主体12、控制终端、嵌设在主体12上的显示屏15和多个控制开关14,主体12内设置有多个控制液压回路的电磁换向阀、单向阀、调压阀和电磁卸荷阀,且安装有用于驱动油泵的油泵电机组,控制终端用于接收控制开关14的信号,并根据信号对油泵电机组、电磁换向阀、单向阀、调压阀和电磁卸荷阀进行调节。
25.油泵出口安装电磁卸荷阀,电磁卸荷阀工作时系统建立起工作压力,电磁卸荷阀不工作时,系统泄压,也为了方便战士将机器手从炮管内取出。保证系统与操作人员安全。
油路中安装调压阀,根据使用情况,灵活设定系统压力,使用电机消耗功率与实际需求功率匹配,减少能源浪费。
26.选用了多种电磁换向阀共同运行实现执行机器人的多项功能,其中选用三位四通电磁换向阀控制执行机械手往复动作,两位两通回止阀控制毛刷杆夹紧。
27.为了使结构更加紧凑,执行油缸6的外侧设置有杆前端抱紧器3、缸前端抱紧器5和缸后端抱紧器10,执行油缸6的一侧设置有导向杆7,导向杆7的一端与杆前端抱紧器3固定连接,另一端依次贯穿缸前端抱紧器5和缸后端抱紧器10。
28.为了加强清洁效果,缸后端抱紧器10上开设有可封闭的清洗液注入口9,且清洗液通过管道输送至杆前端抱紧器3,杆前端抱紧器3靠近毛刷头1的一侧表面设置有清洗液的喷射机构;喷射机构由喷液泵、储液罐、喷头组成,利用喷液泵将储液罐内的清洗液自喷头中喷出到毛刷头1上。
29.为了便于对清洁效果进行检查,杆前端抱紧器3上安装有高清摄像头4,用于拍摄炮管内壁的影像并传输至控制终端,最终显示在显示屏15上。
30.为了便于监测执行油缸6远离毛刷头1的一端设置有用于监测执行油缸6伸长量的位移传感器11,位移传感器11通过导线与控制终端连接;主体12内还安装有用于实时检测前端执行机构执行结果的压力传感器和用于提高散热量的散热风扇,且主体12的底端安装有多个移动轮13。
31.一种炮管擦拭机器人的操作方法,具体包括以下步骤:
32.(2)将前端执行机构安装、连接完成后,放入被擦拭的炮管中;
33.(2)通过控制开关14启动执行油缸6和驱动电机2,控制毛刷头1前进擦拭、后退擦拭或前后擦拭,对炮管的内侧壁进行清理;也可以在控制终端内设置自动化程序,控制执行油缸6和驱动电机2自行配合;
34.(3)在清理过程中,根据炮管内壁的污染程度及擦拭的难易程度,向炮管内喷射清洗液;
35.(4)在擦拭完成后,启动高清摄像头4拍摄炮管内部的影像,传回液压动力站后显示在显示屏15上,根据传回的影像观察是否存在清洁的死角,对死角进行定点清理。
36.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。