1.本发明涉及钛合金成形加工技术领域,更具体地涉及一种钛合金挤压型材成形复杂曲面构件的精确成形调控方法。
背景技术:
2.为了实现高服役性能和长使用寿命,新一代宽体民用客机采用了大量碳纤维增强复合材料整体结构。由于钛合金具有高比强度、耐腐蚀等特点,与复合材料整体结构装配时的相容性好,并且可以起到补强的作用。此外,为了提高机身结构的整体刚强度,在舱门、机身和翼身对接的结构上逐渐采用越来越多的复杂异型钛合金曲面结构替代传统的铝合金。
3.钛合金室温成形塑性差、变形抗力大,通常需将其加热到较高的温度进行成形。由于曲面结构通常具有大半径、大包角、截面非对称、截面变厚度等特点,传统的模锻 数控铣削工艺路线的需要数万吨级锻压机,其生产周期长,成本高。而采用热拉伸弯曲成形 数控铣削工艺路线时,只需将截面积2000~5000mm2的挤压型材作为毛坯进行热拉弯蠕变成形,然后通过数控加工剔除近70%~90%的原材料。这种新工艺路线制造成本低,周期短。
4.热拉弯蠕变工艺获取毛坯的几何精度和残余应力水平将直接决定了后续数控加工的效率和精度。由于复杂异型钛合金曲面结构半径大,包角大,通常使用长2000~4000mm的型材进行热拉弯,加热时型材长度方向产生的膨胀量高达14~30mm。这种热膨胀带来的误差将直接影响到拉弯成形工艺过程的贴模精度。与薄壁小截面型材相比,复杂异型大截面钛合金型材截面高度差大,这将导致弯曲后的截面应力呈现明显的拉伸压缩应力梯度分布。因为钛合金在高温下会发生明显的应力衰减,所以这种复杂的应力状态可以通过高温蠕变来得到很好的调控。热拉弯蠕变工艺通常采用施加直流电的方式加热钛合金型材,复杂异形大截面型材与薄壁型材相比,其电流密度分布呈现截面越大的中心部位电流密度越大,截面较小的分支电流密度越低的趋势。这种不均匀的电流密度分布将使型材内外出现明显的温度差。高温的型材弯曲成形后,还会和模具、空气发生严重的接触换热和对流换热,这进一步加剧了型材的内外温度不均匀。这种极不均匀的温差梯度会导致型材在蠕变过程和冷却过程中发生不均匀的应力衰减,进而影响到曲率构件的成形精度和后续切削加工效率和质量。
5.现有的型材热拉弯蠕变方法主要是针对长度较短、截面较小、几何特征简单的型材拉弯和蠕变,并不能很好地解决复杂异型大截面、大半径、大包角型材热拉弯蠕变过程中热膨胀误差和不均匀电流密度、换热导致严重的型材内外温差等问题。因此,需要提出一种大截面钛合金挤压型材热拉弯蠕变复合精确成形工艺调控方法,能够从拉弯过程中的轨迹进行热膨胀误差补偿,并在蠕变过程中有效降低换热、改善型材内外温差,为复杂异型大截面钛合金曲面构件的精确成形提供有力的技术支撑。
技术实现要素:
6.为了克服上述现有技术的缺点,本发明的目的在于提供一种钛合金挤压型材成形
复杂曲面构件的工艺调控方法。
7.本发明目的为了解决复杂异型大截面钛合金加热产生的膨胀误差、蠕变时型材内外温度不均匀的问题。基于机床机构运动模型,对型材热膨胀误差进行补偿,并通过力控制和位移控制模式进行精确拉弯成形。在蠕变阶段,使用柔性保温工装和模具预热工装补偿接触换热和对流换热带来的热损耗,进而改善了型材弧长方向和截面内外温差。根据本发明的实施方式提供了一种钛合金挤压型材成形复杂曲面构件的工艺调控方法,该方法包括如下步骤:
8.安装步骤,将模具预热工装安装在模具上,将型材装夹至机床的两端的夹钳上,该夹钳由机床的油缸伸缩而带动牵引,将柔性保温工装安装至机床台面;
9.加热步骤,通过所述模具预热工装对所述模具的表面进行加热,控制所述柔性保温工装加热周围环境,通过自阻加热系统对所述型材通直流电进行自阻加热;
10.力闭环控制步骤,对夹装所述型材的夹钳设定拉伸力,从而以力闭环控制的方式消除所述型材在所述加热步骤中产生的热膨胀量;
11.油缸伸缩运动控制参数获取步骤,测得所述型材的实际热膨胀量,并将其补偿到所述夹钳的拉弯轨迹中,获得控制油缸进行伸缩运动从而牵引夹钳所需的参数;
12.拉弯包覆步骤,从力闭环控制转换为位移闭环控制,根据所获得的油缸伸缩运动控制参数,来控制机床进而控制所述油缸同步伸缩,牵引夹钳将所述型材拉弯包覆至所述模具并成形;
13.蠕变步骤,在所述型材包覆至所述模具之后,所述柔性保温工装与模具相合使得所述型材被柔性保温工装与模具包裹,所述柔性保温工装与自阻加热系统一起对所述型材进行温度控制,使得所述型材在特定温度发生蠕变;
14.控温冷却步骤,在蠕变结束后,关闭柔性保温工装和模具预热工装的电源,将柔性保温工装移动离开模具,所述位移闭环控制转换为力闭环控制,使所述型材两端的拉力卸载并自适应其冷却收缩量,所述自阻加热系统控制所述型材的温度降低,然后关闭所述自阻加热系统的电源,接着在所述型材自然冷却到室温后打开所述夹钳取下成形后的型材。
15.可选地,根据本发明的另一个实施方式,在所述加热步骤中,通过所述模具预热工装对所述模具的表面加热到200
‑
400度。
16.可选地,根据本发明的另一个实施方式,在所述加热步骤中,所述自阻加热系统对所述型材通3000
‑
6000a的直流电进行自阻加热。
17.可选地,根据本发明的另一个实施方式,在所述力闭环控制步骤中,对夹装所述型材的夹钳设定1
‑
5吨的拉伸力。
18.可选地,根据本发明的另一个实施方式,在所述拉弯包覆步骤中,根据所获得的油缸伸缩运动控制参数,来控制机床以1
‑
5mm/s的速度控制所述油缸同步伸缩。
19.可选地,根据本发明的另一个实施方式,在所述蠕变步骤,所述柔性保温工装与自阻加热系统一起对所述型材进行温度控制,使得所述型材在整体达到700
‑
730度时,蠕变10
‑
25min。
20.可选地,根据本发明的另一个实施方式,在所述控温冷却步骤,所述位移闭环控制转换为力闭环控制,在该力闭环控制下所述夹钳的拉伸力为1
‑
5 吨。
21.可选地,根据本发明的另一个实施方式,在所述控温冷却步骤,所述自阻加热系统
控制所述型材的温度以1
‑
5度/秒的速度降低至300
‑
400度。
22.根据本发明的另一个实施方式提供了一种钛合金挤压型材成形复杂曲面构件的工艺调控方法,该方法包括步骤如下:
23.(1)在模具上安装好模具预热工装,将型材装夹到机床的两端夹钳上,将柔性保温工装安装到机床台面上;
24.(2)模具预热工装将模具表面加热到200
‑
400度,柔性保温工装开始加热环境气氛,型材通上3000
‑
6000a直流电开始自阻加热;
25.(3)设定机床拉力为1
‑
5吨,以拉力闭环控制的方法消除型材加热过程中的热膨胀量;
26.(4)基于机床机构运动理论模型,将实际的热膨胀量补偿到夹钳拉弯成形轨迹中,并反算出机床拉伸油缸和转臂在拉弯成形过程中所需的数控代码;
27.(5)从力闭环控制模式切换为位移闭环控制模式,机床按照数控代码以1
‑
5mm/s的速度控制四个油缸同步伸缩,将大截面型材按照设定的夹钳轨迹进行拉弯包覆模具并成形;
28.(6)型材完全贴上模具后,柔性保温工装与模具相合,型材被柔性保温工装和模具包裹,柔性保温工装和自阻加热系统通过红外传感器测温一起对型材进行pid控温加热,当型材整体达到700
‑
730度时,开始进行10
‑
25min 的蠕变;
29.(7)蠕变结束后,关闭柔性保温工装和模具加热工装的电源,柔性保温工装远离模具,机床从位移闭环控制的模式转换为力闭环控制模式(设定夹钳的拉力为1
‑
5吨),使型材两端的拉力卸载并自适应其冷却收缩量,自阻加热系统通过控制电流大小先以1
‑
5℃/s的速度降低型材温度,待型材降低至300
‑
400℃时,关闭自阻加热系统电源,待型材自然冷却至室温后,打开两侧夹钳,取下型材。
30.本发明的实施方式提供了钛合金挤压型材成形复杂曲面构件的工艺调控方法。与现有技术相比,根据本发明的实施方式的方法采用了力控制与位移控制切换,在夹钳轨迹中补偿热膨胀量的方法消除加热膨胀带来的误差,采用柔性保温工装和模具预热工装辅助加热的方法,可以有效地降低复杂大截面钛合金曲率构件蠕变过程中与外界发生的热损耗,改善型材的温度不均匀现象,并实现型材在温度均衡环境下的高温蠕变,进而得到高成形精度,低残余应力的曲面构件,为后续的切削等工艺打下夯实的基础。
31.通过参考附图和以下说明,本发明的其它装置、设备、系统、方法、特征和优点将是明显的。包括在本说明书中的所有的另外的这种系统、方法、特征和优点都在本发明的范围内,且由所附权利要求保护。
附图说明
32.通过参考附图可更好地理解本发明。图中的构件不应视作按比例绘制,重点应放在示出本发明的原理上。
33.图1为应用根据本发明的实施方式提供的钛合金挤压型材成形复杂曲面构件的工艺调控方法的示例中y截面型材在1.6a/mm2电流密度下的温度分布(℃)。
34.图2为应用根据本发明的实施方式提供的钛合金挤压型材成形复杂曲面构件的工艺调控方法的示例中y型材在不同电流密度下的最大温差变化。
50.式中δl为热膨胀量,α为热膨胀系数,δt为型材实际温度与室温的差,l0为型材原长。复杂异型大截面型材长度通常为2000~4000mm,对应的热膨胀量高达14~30mmmm。因此必须在拉弯轨迹中进行补偿,提高成形贴模精度。
51.在此,根据本发明的实施方式的一个示例以y型截面的钛合金型材为例。由于y型钛合金型材截面积大且复杂,型材通电后截面心部和外表面温差极大。为了保证型材在蠕变过程中的温度均匀性,本示例通过abaqus电热模块模拟型材实际的温度分布来阐述柔性保温工装和模具预热工装使用的必要性。
52.为了说明y型材截面内外温差,自然对流换热系数为4~12,y型材表面发射率为0.9,钛合金密度为4.44g
·
cm
‑3,焦耳热系数为1,热导率、电阻率和比热容按表1~3设置。当温度达到稳定平衡时,y型材截面温度分布如图1所示,截面上的三个分叉与心部温差高达190摄氏度,其中底部分叉温度最低。y型材在不同电流密度下的最大温差变化如图2所示,仿真结果表明单靠电流自阻加热的方法很难控制型材截面内外温差。y型材在不同环境温度下的最大温差变化如图3所示,模具和环境气氛辅助加热的方法可以有效地控制y型材内外温差。
53.表1不同温度下tc4钛合金的热导率
[0054][0055]
表2不同温度下tc4钛合金的热导率
[0056][0057]
表3不同温度下tc4钛合金的电阻率
[0058][0059]
表4不同温度下tc4钛合金的比热容
[0060][0061]
接下来,参考图4进一步说明根据本发明的一个实施方式的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法。图4为根据本发明的一个实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的流程图。
[0062]
如图4所示,根据本发明的实施方式提供了一种钛合金挤压型材成形复杂曲面构件的工艺调控方法,该方法包括如下步骤:安装步骤,将模具预热工装安装在模具上,将型材装夹至机床的两端的夹钳上,该夹钳由机床的油缸伸缩而带动牵引,将柔性保温工装安装至机床台面;加热步骤,通过所述模具预热工装对所述模具的表面进行加热,控制所述柔性保温工装加热周围环境,通过自阻加热系统对所述型材通直流电进行自阻加热;力闭环控制步骤,对夹装所述型材的夹钳设定拉伸力,从而以力闭环控制的方式消除所述型材在所述加热步骤中产生的热膨胀量;油缸伸缩运动控制参数获取步骤,测得所述型材的实际
热膨胀量,并将其补偿到所述夹钳的拉弯轨迹中,获得控制油缸进行伸缩运动从而牵引夹钳所需的参数;拉弯包覆步骤,从力闭环控制转换为位移闭环控制,根据所获得的油缸伸缩运动控制参数,来控制机床进而控制所述油缸同步伸缩,牵引夹钳将所述型材拉弯包覆至所述模具并成形;蠕变步骤,在所述型材包覆至所述模具之后,所述柔性保温工装与模具相合使得所述型材被柔性保温工装与模具包裹,所述柔性保温工装与自阻加热系统一起对所述型材进行温度控制,使得所述型材在特定温度发生蠕变;控温冷却步骤,在蠕变结束后,关闭柔性保温工装和模具预热工装的电源,将柔性保温工装移动离开模具,所述位移闭环控制转换为力闭环控制,使所述型材两端的拉力卸载并自适应其冷却收缩量,所述自阻加热系统控制所述型材的温度降低,然后关闭所述自阻加热系统的电源,接着在所述型材自然冷却到室温后打开所述夹钳取下成形后的型材。
[0063]
在根据本发明的另一个实施方式中,在所述加热步骤中,可通过所述模具预热工装对所述模具的表面加热到200
‑
400度。
[0064]
在根据本发明的另一个实施方式中,在所述加热步骤中,所述自阻加热系统可对所述型材通3000
‑
6000a的直流电进行自阻加热。
[0065]
在根据本发明的另一个实施方式中,在所述力闭环控制步骤中,对夹装所述型材的夹钳设定1
‑
5吨的拉伸力。
[0066]
在根据本发明的另一个实施方式中,在所述拉弯包覆步骤中,可根据所获得的油缸伸缩运动控制参数,来控制机床以1
‑
5mm/s的速度控制所述油缸同步伸缩。
[0067]
在根据本发明的另一个实施方式中,在所述蠕变步骤,可由所述柔性保温工装与自阻加热系统一起对所述型材进行温度控制,使得所述型材在整体达到700
‑
730度时,蠕变10
‑
25min。
[0068]
在根据本发明的另一个实施方式中,在所述控温冷却步骤,所述位移闭环控制转换为力闭环控制,在该力闭环控制下所述夹钳的拉伸力为1
‑
5吨。
[0069]
在根据本发明的另一个实施方式中,在所述控温冷却步骤,可由所述自阻加热系统控制所述型材的温度以1
‑
5度/秒的速度降低至300
‑
400度。
[0070]
下面参考图5进一步说明根据本发明的一个实施方式的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法。图5为根据本发明的一个实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的流程图。
[0071]
如图5所示,根据本发明的另一个实施方式提供了一种钛合金挤压型材成形复杂曲面构件的工艺调控方法,该方法包括步骤如下:(1)在模具上安装好模具预热工装,将型材装夹到机床的两端夹钳上,将柔性保温工装安装到机床台面上;(2)模具预热工装将模具表面加热到200~400度,柔性保温工装开始加热环境气氛,型材通上3000~6000a直流电开始自阻加热; (3)设定机床拉力为1~5吨,以拉力闭环控制的方法消除型材加热过程中的热膨胀量;(4)基于机床机构运动理论模型,将实际的热膨胀量补偿到夹钳拉弯成形轨迹中,并反算出机床拉伸油缸和转臂在拉弯成形过程中所需的数控代码;(5)从力闭环控制模式切换为位移闭环控制模式,机床按照数控代码以1~5mm/s的速度控制四个油缸同步伸缩,将大截面型材按照设定的夹钳轨迹进行拉弯包覆模具并成形;(6)型材完全贴上模具后,柔性保温工装与模具相合,型材被柔性保温工装和模具包裹,柔性保温工装和自阻加热系统通过红外传感器测温一起对型材进行pid控温加热,当型材整体达到700~730度时,开
始进行10~25min的蠕变;(7)蠕变结束后,关闭柔性保温工装和模具加热工装的电源,柔性保温工装远离模具,机床从位移闭环控制的模式转换为力闭环控制模式(设定夹钳的拉力为1~5吨),使型材两端的拉力卸载并自适应其冷却收缩量,自阻加热系统通过控制电流大小先以 1~5℃/s的速度降低型材温度,待型材降低至300~400℃时,关闭自阻加热系统电源,待型材自然冷却至室温后,打开两侧夹钳,取下型材。
[0072]
以下,结合附图6
‑
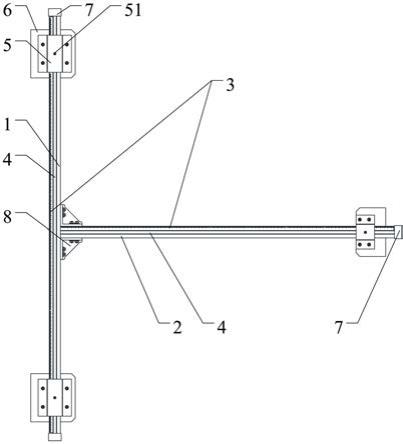
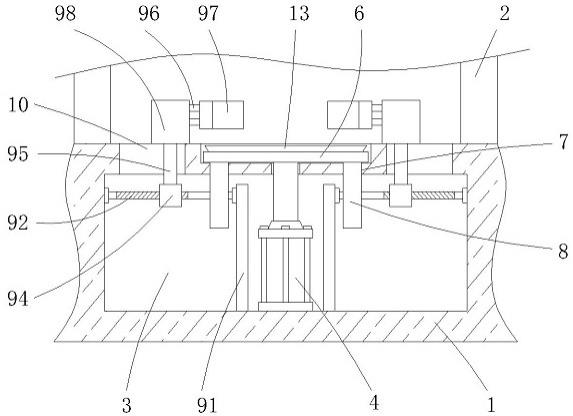
11更具体地说明应用根据本发明的实施方式所提供方法的示例性实例的实施过程。图6为根据本发明的实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的调控曲线图。图7为根据本发明的实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的拉弯机床机构几何建模示意图。图8为根据本发明的实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的加热阶段的示意图。图9为根据本发明的实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的拉弯包覆阶段的示意图。图10为根据本发明的实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的蠕变阶段的示意图。图11为根据本发明的实施方式提供的一种钛合金挤压型材成形复杂曲面构件的工艺调控方法的控温冷却阶段的示意图。
[0073]
大截面钛合金曲面构件热拉弯蠕变复合精确成形工艺调控曲线如图6所示。热拉弯蠕变复合工艺分为加热、预拉 拉弯、蠕变导致的应力松弛、控温冷却四个阶段。在加热阶段,型材2由自阻加热系统通过自阻加热方式将其温度加热到700~730度,夹钳1会基于力控制模式开始运动。在预拉和拉弯阶段,夹钳1基于位移控制模式按照补偿热膨胀后的夹钳轨迹进行运动,型材2开始拉弯包覆成形。由于拉伸和弯曲效应,型材2截面的应力会呈现拉压应力梯度分布。型材2的截面越高且形状越复杂,拉压应力梯度分布也会越复杂。当进行蠕变时,夹钳1保持不动,拉力会迅速衰减,截面应力差也会迅速降低。该阶段需要使用柔性保温工装3、模具下预热工装4和模具上预热工装6来分别辅助加热模具5和周围环境气氛,以此来补偿型材2的接触换热和对流换热导致的热损耗。该示例中模具下预热工装4和模具上预热工装6用作模具预热工装,可以从上下两个方向对模具进行预热,使预热更加均匀且快速高效。然而本领域技术人员应理解,在其它实施方式中,根据需要还可使用其它形式的模具预热工装。在该示例中,使用的柔性保温工装3除了对型材2保温、控温、加热等以外,还具有可对型材2柔性地控形的作用。当蠕变结束后,为了避免由温度骤降导致型材2的内部残余应力水平升高,使用控温冷却的方式降低型材2的温度。参考附图,在该示例性实例中,具体操作步骤如下。
[0074]
将模具5安装在安装底座7上,模具上下预热工装6、4上通过螺栓连接在模具5上,将复杂y型大截面型材2装夹到拉弯机床的两端夹钳1上,将柔性保温工装3安装到机床工作台9上。
[0075]
参见图8,通过模具上下预热工装6、4将模具5靠近型材2的表面加热到200~400度,柔性保温工装3开始加热型材周围的环境气氛,自阻加热系统开启,3000~6000a直流电通过夹钳1和型材2形成一个回路,从而型材2 开始自阻加热。
[0076]
由于机床是左右对称的,本示例以机床的右半侧为例进行说明。力闭环控制模式是利用拉伸油缸8上的力传感器感知夹钳的拉力,当实际的拉力不等于设定的拉力时,拉伸油缸8会通过pid(proportion integrationdifferentiation比例
‑
积分
‑
微分)控制自行
收缩来达到目标拉力,力控制模式可以有效地消除自适应型材2热膨胀的反作用力。设定机床拉伸油缸8 的拉力为1
‑
5吨,拉伸油缸8被动进行收缩的长度近似等于型材2热膨胀量的一半。
[0077]
对机床右侧机构进行理论建模,将模具5的包覆角度、型材2的长度、预拉量和拉弯过程中的拉伸量作为工艺参数进行计算。将实际的热膨胀量的一半和型材2长度的一半之和作为拉弯之前的修正长度,根据完成包覆角的夹钳轨迹反算出机床的拉伸油缸8和转臂油缸11在整个拉弯成形过程中所需的伸缩量,进而获得机床运动的参数,该参数可以是操作机床的数控代码。
[0078]
结合图7,对步骤4的计算方法进行说明。拉伸油缸8初始位置为b点,夹钳1的形心为j点。拉伸油缸8和转臂油缸11进行伸缩的同时,右侧转臂12围绕机床工作台9的w点进行转动,拉伸油缸8围绕转轴d点转动,转臂油缸11围绕a点进行转动。
[0079]
由于型材加热后会膨胀,将热膨胀量和预拉量之和的一半定为δ1。预拉阶段过程中的夹钳1从j点运动到j1点,原长2l的型材2每边伸长了δ1。预拉伸量可以有效地消除装夹间隙并拉紧型材2到达屈服状态。夹钳1的形心 j1(x
j1
,y
j1
)点的坐标如公式所示
[0080][0081]
式中:x
j1
是夹钳1的形心j1的横坐标,y
j1
是夹钳1的形心j1的纵坐标,β为装夹型材时转臂12的初始角度(一般为0
°
),h为拉伸油缸8的偏置距离bd,wb为转臂12转动点w和拉伸油缸8初始位置b点之间的距离,δ1为型材2的热膨胀量和预拉量之和的一半。
[0082]
如图所示,拉伸弯曲过程中的夹钳1从j1点运动到j2点,型材2在半径为r的模具5上包覆角度,并进一步被拉伸了δ2。拉弯过程中合理的拉伸量可以在弯曲过程中始终张紧型材2并保持与模具5紧密接触,进而显著提高贴模精度。夹钳1的形心j2(x
j2
,y
j2
)点的坐标如公式所示
[0083][0084]
如公式所示,拉伸油缸8的转轴从d点运动到d2(x
d2
,y
d2
)点
[0085][0086]
式中:x
w
为转臂12转动点w的横坐标,θ为转臂12转动的角度,wb为转臂12转动点w和拉伸油缸8初始位置b点之间的距离,β为装夹型材时转臂12的初始角度(一般为0
°
),为型材2在模具5上包覆的角度,r为模具5的半径,δ1为型材2的热膨胀量和预拉量之和的一半,δ2为型材2在模具5上包覆角度后进一步被拉伸的量,x
j2
是夹钳1移动后的形心j2的横坐标,y
j2
是夹钳1移动后的形心j2的纵坐标,x
d2
是拉伸油缸8的转轴d移动到d2位置的横坐标,y
d2
是拉伸油缸8的转轴d移动到d2位置的纵坐标,。
[0087]
由于机床运动是依靠两个拉伸油缸和两个转臂油缸协同伸缩实现的,因此设计的轨迹需要转换为控制四个油缸的数控代码来控制油缸伸缩。拉伸油缸8伸缩量δ
t
和转臂油缸11伸缩量δ
a
可由公式获得
[0088][0089]
式中:ac和ac2分别为转臂油缸11转轴a与点c、点c2之间的距离,dj1和 dj2分别为拉伸油缸8的转轴d与夹钳1的形心j1点、移动后形心j2点之间的距离。
[0090]
参见图9,位移闭环控制模式是利用位移传感器感知拉伸油缸8和转臂油缸11的绝对位置,当拉伸油缸8和转臂油缸11的实际位置不等于设定位置时,拉伸油缸8和转臂油缸11会按照设定的速度进行自由伸缩以达到设定位置。当拉弯开始时,力闭环控制模式切换为位移闭环控制模式,拉伸油缸8和转臂油缸11会按照数控代码以1
‑
5mm/s的速度同步伸缩,夹钳1会按照修正的轨迹将大截面型材2进行拉弯包覆成形。
[0091]
参见图10,型材2完全包覆在模具5之后,柔性保温工装3与模具5 相合,型材2被柔性保温工装3和模具5包裹。柔性保温工装3和自阻加热系统通过红外传感器感知型材2的温度,并通过pid控温方式对型材2进行加热。当型材2整体达到700~730度时,开始进行10~25min的蠕变。
[0092]
参见图11,蠕变结束后,关闭柔性保温工装3和模具上下加热工装6、 4的电源,柔性保温工装3移动远离模具5。机床从位移闭环控制的模式转换为力闭环控制模式,在该力闭环控制模式可设定拉力为1~5吨,使拉伸油缸8的拉力开始卸载。自阻加热系统通过控制电流大小先以1~5℃/s的速度降低型材2的温度,待型材2的温度降低至300~400℃时,关闭自阻加热系统电源。在冷却过程中,拉伸油缸8会自由伸出以适应型材2温度降低导致的收缩。待型材2自然冷却至室温后,打开夹钳1,取下型材2。成形后的型材2即可用于切削等任何后续工艺。
[0093]
本发明主要应用于复杂异型大尺寸大截面钛合金曲面构件热拉弯蠕变复合精确成形工艺调控方法,对于本领域的技术人员来说,本发明可以有各种更改和变化。例如,也可以进一步推广应用到其他复杂大截面、大半径和大包覆角度的钛合金或其他合金曲面构件的热拉弯蠕变工艺。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
[0094]
应理解,前述仅说明了一些实施方式,可进行改变、修改、增加和/或变化而不偏离所公开的实施方式的范围和实质,该实施方式是示意性的而不是限制性的。此外,所说明的实施方式涉及当前考虑为最实用和最优选的实施方式,其应理解为实施方式不应限于所公开的实施方式,相反地,旨在覆盖包括在该实施方式的实质和范围内的不同的修改和等同设置。此外,上述说明的多种实施方式可与其它实施方式共同应用,如,一个实施方式的方面可与另一个实施方式的方面结合而实现再另一个实施方式。另外,任何给定组件的各独立特征或构件可构成另外的实施方式。
[0095]
以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。