1.本发明涉及一种控制车辆的动作的车辆控制装置。
背景技术:
2.现在,正在积极开发自动驾驶车辆的技术。在自动驾驶中,重要的是高精度地推定车辆的位置。车辆的位置一般通过组合例如由gnss(global navigation satellite system:全球导航卫星系统)推定的车辆的绝对位置、方位、车辆速度和由车速传感器或陀螺仪传感器推定的车辆的相对移动量,能够高精度地推定。
3.在车辆控制装置辅助驾驶员的车辆驾驶时,除了推定车辆的位置之外,推定车辆在道路上的哪个车道上行驶也是有用的。例如,考虑在车辆在高速道路上行驶的情况下,通过推定车辆正在行驶的车道(行驶车道)来区别车辆在高速道路的主车道和分支道路中的哪一个上行驶,提供适合于道路种类的驾驶辅助。
4.下述专利文献1公开了推定行驶车道的技术。该文献以“正确推定自身车辆是否进入了从行驶道路的主车道分支的分支道路。”为课题,公开了以下技术:“检测自身车辆行驶中的道路的车道数(s110),根据接收器的检测结果推定车道数及自身车辆的行驶车道(s120),根据前方车辆的检测结果推定车道数及自身车辆的行驶车道(s130)。然后,基于在s110中检测出的“自身车辆行驶的道路的车道数”、“基于轮廓标的行驶车道的推定结果”以及“基于前方车辆的行驶车道的推定结果”,来推定自身车辆的行驶车道(s140)。因此,能够提高该行驶车道的推定结果的可靠度,能够基于该推定结果正确地推定自身车辆是否进入了从行驶道路的主车道分支的分支道路。”(参照摘要)。现有技术文献专利文献
5.专利文献1:日本专利特开2004
‑
341941号公报
技术实现要素:
发明要解决的问题
6.在以往的行驶车道推定中,一般使用单一的检测方式来推定行驶车道。在这样的方法中,例如在该检测方式中使用的传感器的精度降低的环境下,推定结果本身的可靠度会降低。
7.在如上述专利文献1那样使用多个检测方式的情况下,如果某个检测方式的精度低,则认为该低精度的检测方式有可能对最终的推定结果带来不良影响。另外,如果仅采用被假定为精度足够高的检测方式,则难以充分发挥使用多个检测方式的效果。
8.本发明是鉴于上述课题而完成的,其目的在于提供一种在使用多个检测方式判定行驶车道时,即使在某个检测方式的精度不充分的情况下,也能够高精度地推定行驶车道的技术。解决问题的技术手段
9.本发明的车辆控制装置通过综合第一检测部的行驶车道推定结果和第二检测部的行驶车道推定结果各自的可靠度来计算综合可靠度,通过相互比较该综合可靠度来推定行驶车道。发明的效果
10.根据本发明的车辆控制装置,通过综合各检测部的推定结果各自的可靠度并相互比较,即使在某一个检测部的推定结果的精度不充分的情况下,也能够高精度地推定行驶车道。
11.另外,根据本发明的车辆控制装置,由于通过可靠度这样的统一的尺度来相互比较各检测部的推定结果,因此能够容易地实现检测部的追加、删除。
附图说明
12.图1是实施方式1的车辆控制装置100的构成图。图2是行驶车道推定部113的详细构成图。图3是说明综合可靠度计算部1137计算综合可靠度的步骤的图。图4是说明第一检测部1131的推定结果的可靠度的图。图5是说明第二检测部1132的推定结果的可靠度的图。图6是说明第三检测部1133的推定结果的可靠度的图。
具体实施方式
13.<实施方式1>图1是本发明的实施方式1的车辆控制装置100的构成图。车辆控制装置100是控制车辆的动作的装置,搭载在车辆内。车辆控制装置100具备运算部110、gnss调谐器120、陀螺仪传感器130、和高精度地图140。运算部110具有位置推定部111、行驶车道推定部113、和位置修正部114。
14.gnss调谐器120从gnss获取车辆的绝对位置、方向和移动速度。陀螺仪传感器130测量车辆的每个旋转轴的角速度,推定车辆的姿势。作为旋转轴,一般仅测量横摆轴、或者测量加上纵倾轴、侧倾轴的3个轴。高精度地图140预先存储在车辆控制装置100所具备的存储装置中。例如能够将道路中心线或构成行驶车道的分界线的坐标存储为高精度地图140。
15.位置推定部111使用gnss调谐器120获取到的绝对位置、方位、移动速度、陀螺仪传感器130获取到的角速度或车辆的车速等信息,推定车辆的位置。行驶车道推定部113通过比较车辆的位置和高精度地图140,推定车辆正在行驶的道路和行驶车道。详细情况将在后面叙述。位置修正部114从摄像机等拍摄设备获取车辆的周边图像,根据该周边图像修正车辆的位置。
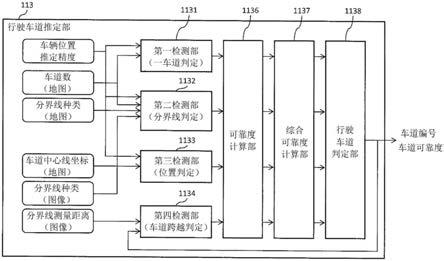
16.图2是行驶车道推定部113的详细构成图。行驶车道推定部113具备多个推定行驶车道的检测部。在本实施方式1中,示出了具备第一检测部1131~第四检测部1134的例子。各检测部分别通过不同的检测部、推定方式推定行驶车道。关于各检测部的具体的推定方式将在后面叙述。
17.行驶车道推定部113还具备可靠度计算部1136、综合可靠度计算部1137、和行驶车
道判定部1138。可靠度计算部1136计算各检测部的推定结果的可靠度。替代地,也可以各检测部自己计算可靠度。以下,为了便于说明,假设由可靠度计算部1136计算可靠度。综合可靠度计算部1137通过综合每个车道的可靠度来计算综合可靠度。稍后将描述计算综合可靠度的具体示例。行驶车道判定部1138通过相互比较综合可靠度,最终推定行驶车道。例如,推定结果以车道编号及其可靠度的方式被输出。
18.图3是说明综合可靠度计算部1137计算综合可靠度的步骤的图。在此,假定车辆正在具有4条车道的道路上行驶的情况。各检测部输出的行驶车道的推定结果未必仅为一个,有时也将行驶车道的多个候选作为推定结果输出。可靠度计算部1136针对各候选计算可靠度。在图3所示的例子中,对于各检测部的推定结果,假定得到了该图内的表所示的可靠度。
19.综合可靠度计算部1137针对每个车道综合各检测部的推定结果的可靠度。例如,第二检测部1132和第三检测部1133分别将车道编号3作为行驶车道的候选而输出,各自的可靠度为80和40。其他检测部不将车道编号3作为行驶车道的候选。因此,车道编号3的总可靠度为120。对于其他的车道号码也同样地按每个车道综合可靠度。这里,通过简单地合计可靠度来进行综合,但例如也可以对每个检测部进行加权。例如,在重视第一检测部1131的推定结果的情况下,只要使第一检测部1131的权重大于其他检测部的权重即可。
20.综合可靠度计算部1137还通过求出按每个车道综合的可靠度的相对比例,来计算各车道的综合可靠度。在图3所示的例子中,各检测部的推定结果的可靠度的总和为375,车道编号3的可靠度合计为120,因此车道编号3的综合可靠度为120/375
×
100=32。对于其他车道编号也同样计算综合可靠度。
21.综合可靠度是将各检测部的推定结果横贯车道地综合而得的。因此,即使在某一个检测部的推定结果的可靠度低的情况下,如果其他检测部的推定结果的可靠度高,则认为综合可靠度的精度足够高。本实施方式1基于这样的考虑方法,通过相互比较综合可靠度来推定行驶车道。因此,行驶车道判定部1138将综合可靠度最高的车道编号和该综合可靠度作为推定结果输出。
22.图4是说明第一检测部1131的推定结果的可靠度的图。第一检测部1131根据由位置推定部111推定的车辆位置来查询高精度地图140,从而判定车辆是否正在仅具有一条车道的道路(一车道道路)上行驶。例如,获取道路的车道数,根据该车道数是否为1,能够判定是否正在一车道道路上行驶。在第一检测部1131判定为车辆正在一车道道路上行驶的区间中,可靠度计算部1136使可靠度高于除此以外的区间。例如可以考虑以下的例子。
23.(一车道道路的可靠度的例子:其一)第一检测部1131的推定结果的可靠度以如下方式设定:第一检测部1131判定为车辆正在一车道道路上行驶的区间与其它区间相比,前者的可靠度高。例如,如图4所示,在车辆正在一车道道路上行驶的区间中,第一检测部1131的可靠度为100,而在其他区间中,第一检测部1131的可靠度为0。
24.(一车道道路的可靠度的例子:其二)在第一检测部1131判定为车辆正在一车道道路上行驶的区间中,第一检测部1131的推定结果的可靠度被设定得比其他检测部的判定结果的可靠度高。例如,在车辆正在一车道道路上行驶的区间中,第一检测部1131的可靠度为100,并且即使在其它检测部足够可
靠的情况下,其它检测部的可靠度也被设定为小于100。在其他区间中,同等地处理各检测部的可靠度。
25.(一车道道路的可靠度的例子:其三)行驶车道判定部1138在第一检测部1131推定为车辆正在一车道道路上行驶的区间中,与其他检测部的推定结果无关地,视为车辆正在该一车道道路上行驶。这是因为,如果车辆位置的精度足够高,则在仅具有一车道的道路上推定行驶车道的意义较小。具体而言,可以通过将第一检测部1131的可靠度设定得极高来采用第一检测部1131的推定结果,也可以跳过综合可靠度计算部1137而由行驶车道判定部1138最终决定行驶车道。
26.图5是说明第二检测部1132的推定结果的可靠度的图。第二检测部1132根据位置推定部111推定的车辆位置来查询高精度地图140,由此对当前正行驶的道路的车道数和分界线种类信息进行获取。第二检测部1132还通过识别车辆的周边图像中包含的道路的分界线种类,来推定车辆正在行驶的车道。
27.在图5所示的例子中,基于周边图像识别分界线种类的结果是,车辆左侧的分界线为实线,车辆右侧的分界线为虚线。第二检测部1132还能够基于查询高精度地图140的结果,在车辆行驶中的道路上,将左侧的分界线为实线且右侧的分界线为虚线的车道判定为仅车道1。因此,第二检测部1132推定车辆正在车道1上行驶。
28.可靠度计算部1136针对第二检测部1132根据分界线种类推定的行驶车道,将可靠度设定得比其他车道高。在图5所示的例子中,第二检测部1132根据分段线种类判定为正在车道1上行驶。因此,将车道1的可靠度设定得比其他车道的可靠度高。
29.在图5所示的其他例子中,在车辆的两侧相邻的分界线均为虚线的情况下,第二检测部1132推定为行驶在车道2或车道3上。在这种情况下,由于无法将行驶车道推定为一个,因此与将车道1或车道4推定为行驶车道时相比,也可以将可靠度设定得较低。
30.图6是说明第三检测部1133的推定结果的可靠度的图。第三检测部1133通过按照位置推定部111推定的车辆位置查询高精度地图140,来推定车辆正行驶的道路。第三检测部1133还通过查询高精度地图140,获取上述道路的所有车道的中心线的坐标。
31.可靠度计算部1136计算推定出的车辆位置与各车道的中心线之间的距离(垂线距离)。越是车辆位置与中心线之间的距离短的车道,可靠度计算部1136将其可靠度设定得越高。例如可以考虑以下的例子。(a)将到中心线的距离最短的车道的可靠度设为最高,将其他车道的可靠度设定为比其低的一律的值。(b)以与到中心线的距离成反比的方式设定可靠度。(c)对于到中心线的距离最短的车道以外的车道,将可靠度设为0。
32.第四检测部1134周期性地获取从车辆的周边图像得到的从车辆到分界线的测量距离,并基于该测量距离,在每个该周期中判定车辆是否跨过分界线而在车道间移动。第四检测部1134在判定为车辆跨过分界线而在车道间移动之前的期间,视为未变更行驶车道。变更前后各自的行驶车道可以使用行驶车道判定部1138的推定结果。或者,也可以使用其他判定部的推定结果。
33.<实施方式1:总结>本实施方式1的车辆控制装置100通过对每个车道综合各检测部的推定结果的可靠度,来计算综合可靠度,并且通过相互比较综合可靠度来最终推定行驶车道。由此,即使在某个检测部使用的检测方式(摄像机或gnss调谐器等检测器以及推定方式)的可靠度低
的情况下,通过综合其他检测部使用的检测方式的可靠度,也能够弥补可靠度的低而得到高精度的推定结果。
34.在本实施方式1的车辆控制装置100中,如使用位置推定结果的行驶车道推定(第一检测部1131~第三检测部1133)、使用车辆的周边图像的行驶车道推定(第四检测部1134)、将它们组合使用的行驶车道推定(第二检测部1132)等那样,各检测部推定行驶车道时所使用的检测方式按每个检测部而不同。因此,通过分别综合从多个观点推定行驶车道的结果,计算综合可靠度。由此,能够提高最终的推定结果的可靠度。
35.在本实施方式1的车辆控制装置100中,当第一检测部1131判定车辆正在一车道道路上行驶时,使该推定结果优先于其它检测部的推定结果。由此能够简化推定处理,因此从运算负荷和处理时间等观点来看是有利的。另外,由于认为正在一车道道路上行驶时的车辆位置精度比较高,所以从可靠度的观点来看也是有利的。
36.在本实施方式1的车辆控制装置100中,第四检测部1134根据车辆是否跨过分界线移动来判定行驶车道。由此,在车辆跨过分界线移动之前的期间,能够挪用上次的推定结果,因此从运算负荷和处理时间等观点来看是有利的。
37.<实施方式2>在实施方式1中说明了可靠度计算部1136按照各检测部的推定方式的特性来设定可靠度的情况。除此之外,在得到车辆的推定位置或周边图像本身的可靠度的情况下,也可以考虑该可靠度来设定推定结果的可靠度。因此,在本发明的实施方式2中,说明将车辆的推定位置或周边图像本身的可靠度作为推定结果的可靠度来考虑的例子。车辆控制装置100的构成与实施方式1相同。
38.第二检测部1132通过识别车辆的周边图像中包含的分界线种类来推定行驶车道。因此,该推定结果依赖于周边图像的精度。在周边图像的精度低的情况下,可靠度计算部1136也可以将第二检测部1132的推定结果的可靠度设定得比除此以外的情况低。周边图像的精度例如可以从提供周边图像的控制装置获取。或者,如果是夜间,则假定周边图像的精度低,所以也可以在夜间将可靠度设定得比除此以外的时间段低。可以将时间存储在车辆控制装置100的内部。例如,在车辆的推定位置信息包括从gnss获得的时间信息的情况下,则可以使用该时间信息。
39.第三检测部1133使用位置推定部111推定的车辆位置,获取车道中心线与车辆之间的距离。因此,该推定结果依赖于车辆位置的推定精度。例如,可以基于从gnss调谐器120获得的定位误差的信息来计算车辆位置的推定精度。在车辆位置的推定精度低的情况下,可靠度计算部1136也可以将第三检测部1133的推定结果的可靠度设定得比除此以外的情况低。在车辆位置的推定精度高的情况下,也可以以强调第三检测部1133的推定结果的方式设定可靠度。
40.第四检测部1134在识别了车辆周边图像中包含的分界线种类的基础上,计算车辆与分界线之间的距离。因此,该判定结果依赖于周边图像的精度。在周边图像的精度低的情况下,可靠度计算部1136也可以将第四检测部1134的推定结果的可靠度设定得比除此以外的情况低。同样地,也可以在夜间将可靠度设定得比除此以外的时间段低。
41.<实施方式3>
在实施方式1~2中,可靠度计算部1136计算各检测部(1131~1134)的推定结果的可靠度,综合可靠度计算部1137和行驶车道判定部1138使用该可靠度来判定行驶车道。因此,综合可靠度计算部1137和行驶车道判定部1138只要能够获取推定结果的可靠度,则无论各检测部(1131~1134)通过怎样的步骤进行推定,都能够分别求出综合可靠度和行驶车道。通过利用这一点,能够自由地替换各检测部(1131~1134)。
42.例如,假设更新第一检测部1131实施的检测步骤,替换为修正版的第一检测部1131。可靠度计算部1136无论在将第一检测部1131替换为修正版之前还是之后,都计算第一检测部1131的推定结果,并提供给综合可靠度计算部1137。换言之,可靠度计算部1136将修正版的第一检测部1131的推定结果的可靠度作为修正前的第一检测部1131的推定结果的可靠度进行处理。由此,综合可靠度计算部1137和行驶车道判定部1138,在修正第一检测部1131的前后,都能够实施相同的处理。对于其他检测部也同样。由此,由于能够自由地替换各检测部,所以能够根据例如车辆的车种或规格等,灵活地重新构成行驶车道推定部113。
43.为了能够自由地替换各检测部,无论是在替换之前还是之后,只要使各检测部与可靠度计算部1136之间的接口相同即可。例如,在将各检测部构成为软件模块的情况下,在各模块和可靠度计算部1136之间预先设置用于收发推定结果的公共api(application programming interface,应用程序接口),替换前后的任一模块都可以经由该api收发推定结果即可。在通过硬件构成各检测部的情况下也同样,无论是在替换之前还是之后只要使信号线等接口都相同即可。
44.<本发明的变形例>本发明不限于上述实施方式,包含各种变形例。例如,上述实施方式是为了容易理解地说明本发明而进行的详细说明,并不一定限定于具备所说明的全部构成。另外,可以将某实施方式的构成的一部分置换为其他实施方式的构成,另外,也可以在某实施方式的构成中加入其他实施方式的构成。另外,对于各实施方式的构成的一部分,能够进行其他构成的追加、删除、置换。
45.上述各构成、功能、处理部、处理单元等例如可通过利用集成电路进行设计等而以硬件来实现它们的一部分或全部。另外,上述的各构成、功能等也可以通过处理器解释并执行实现各个功能的程序而由软件实现。实现各功能的程序、表、文件等信息可以存储在存储器、硬盘、ssd(solid state drive,固态硬盘)等记录装置、或者ic卡、sd卡等记录介质中。另外,控制线和信息线表示在说明上被认为是必要的,在产品上未必表示全部的控制线和信息线。实际上也可以认为几乎全部的构成都相互连接。
46.在以上的实施方式中,说明了行驶车道判定部1138将综合可靠度最高的车道推定为行驶车道的情况。行驶车道判定部1138只要能够通过相互比较综合可靠度来推定行驶车道,则也可以使用其他方法。例如,可以考虑通过相互比较各车道的综合可靠度的时间序列变化来推定最大似然的行驶车道等。
47.在以上的实施方式中,说明了使用gnss调谐器或陀螺仪传感器的位置推定结果和周边图像来推定行驶车道的情况,但也可以代替其或与其并用而使用其他传感器。例如可以考虑通过激光测距传感器或雷达来识别车辆的周边结构,并基于此来推定行驶车道。即使在这种情况下,通过在各检测部的推定结果中包含可靠度,也能够使用对每个车道综合
可靠度的本发明的方法。符号的说明
48.100:车辆控制装置,110:运算部,111:位置推定部,113:行驶车道推定部,1131:第一检测部,1132:第二检测部,1133:第三检测部,1134:第四检测部,1136:可靠度计算部,1137:综合可靠度计算部,1138:行驶车道判定部,114:位置修正部,120:gnss调谐器,130:陀螺仪传感器,140:高精度地图。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

