:
1.本发明涉及智能交通领域,具体而言是一种道路路径行程时间的滚动预测方法。
背景技术:
2.行程时间是表征交通拥挤状态的最直观有效的交通流参数,因此通常采用行程时间来评价交通状态;而且交通拥挤的本质就是车辆的实际行程时间超过了人们期望的(合理的)行程时间,所以路径行程时间信息更符合出行者的心理需求,符合其路径选择的行为习惯。
3.现有技术中,可以通过两种方法实现路径行程时间的预测:第一种是基于直接获得的路径的历史行程时间数据进行预测;第二种是首先预测各路段的行程时间,然后进行累加得到车辆的起讫点间路径的行程时间。但是因为路径时间较长,采用第一种方法往往会导致预测滞后现象;而第二种方法尽管可以缩短预测周期,但根据预测本身所具有的特性,可以知道预测的时间点越远,预测的准确度越差,距离起点较远的路段的行程时间,在行驶完整个路程之前,可能已经随着时间的推移发生了很大变化,从而导致仅靠简单累加得到的路径行程时间准确度降低。
技术实现要素:
4.本发明所要解决的技术问题是,提供一种准确预测路径行程时间的道路路径行程时间的滚动预测方法,通过对路段行程时间进行动态误差修正预测,然后对各路段的行程时间进行错时累加,最终得到贴合实际的路径行程时间的预测值。
5.本发明的技术解决方案是,提供一种道路路径行程时间的滚动预测方法,包括以下步骤,
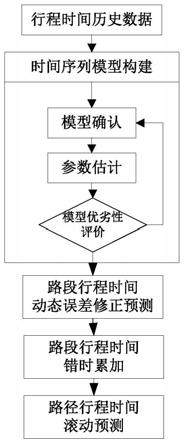
6.步骤一,根据各路段历史行程时间数据,分别建立时间序列模型;
7.步骤二,t时刻对每一个路段进行向前l步预测,得到路径行程时间的初始预测值,并且根据路径行程时间的初始预测值计算得到各路段的平均行程时间;
8.步骤三,t 1时刻对每一个路段的路径行程时间的初始预测值进行动态误差修正,得到 t 1时刻向前l步的预测值;基于修正后的各路段的路径行程时间预测值,以及t时刻各路段的平均行程时间,对初始路径行程时间的初始预测值进行错时累加,得到t 1时刻路径行程时间的滚动预测值,并得到各路段平均行程时间;
9.步骤四,继续进行下去,实现路径行程时间的滚动预测。
10.作为优选,步骤一中需要对建立好的模型进行确认。
11.作为优选,建立好时间序列模型后,通过检验时间序列模型残量是否为白噪声,如果是白噪声序列,则进行下一步;否则,应重新建立新的时间序列模型。
12.进一步的,:步骤三中的动态误差修正,通过以下步骤实现,
13.(1)输入行程时间序列{x1,x2,
…
,x
t
},确定时间序列模型arima(p,d,q)的阶数p,d,q,时间序列模型一般形式为:φ(b)δ
d
y
t
=δ θ(b)ε
t
,其中,
14.行程时间序列{x1,x2,
…
,x
t
}在为在时刻1,2,
…
,t的行程时间数据,t为当前时刻,
15.φ(b)=1
‑
φ1b
‑
φ2b2‑…‑
φ
p
b
p
16.θ(b)=1
‑
θ1b
‑
θ2b2‑…‑
θ
q
b
q
,,,,。
17.(2)估计p个自回归参数φ1,φ2,
…
,φ
p
和q个移动平均参数θ1,θ2,
…
,θ
q
;
18.(3)检验实现序列模型残量是否为白噪声,如果是,则继续下一步;否则,转步骤(1);
19.(4)计算时间序列模型的传递函数:g0=1,
20.(5)计算时刻t向前l(l=1,2,3,
…
)步的预测值及其95%置信区间
[0021][0022][0023]
(6)根据时刻t 1的实际值和时刻t的预测值,对时刻t 1向前l(l=1,2,3,
…
)步的预测值进行动态修正
[0024][0025]
采用以上方案后与现有技术相比,本发明具有以下优点:通过上述方法,通过对路段行程时间进行动态误差修正预测,然后对各路段的行程时间进行错时累加,最终得到贴合实际的路径行程时间的预测值。
附图说明:
[0026]
图1为本发明的流程示意图。
[0027]
图2为路径示意图.
[0028]
图3为本发明的路段行程时间动态误差修正预测示意图。
[0029]
图4为实施例效果评价的第一条路径示意图。
[0030]
图5为实施例效果评价的第二条路径示意图。
[0031]
图6为实施例效果评价的第三条路径示意图。
[0032]
图7为实施例路径差分后数据的自相关函数和偏自相关函数。
具体实施方式:
[0033]
下面就具体实施方式对本发明作进一步说明:
[0034]
实施例1
[0035]
如图1所示,一种道路路径行程时间的滚动预测方法,包括以下步骤,
[0036]
步骤一,根据各路段历史行程时间数据,分别建立时间序列模型;
[0037]
步骤二,t时刻对每一个路段进行向前l步预测,得到路径行程时间的初始预测值,并且根据路径行程时间的初始预测值计算得到各路段的平均行程时间;
[0038]
步骤三,t 1时刻对每一个路段的路径行程时间的初始预测值进行动态误差修正,得到 t 1时刻向前l步的预测值;基于修正后的各路段的路径行程时间预测值,以及t时刻各路段的平均行程时间,对初始路径行程时间的初始预测值进行错时累加,得到t 1时刻路径行程时间的滚动预测值,并得到各路段平均行程时间;
[0039]
步骤四,继续进行下去,实现路径行程时间的滚动预测
[0040]
具体的,如图2所示,城市道路网络中的路径是由一系列的道路单元(车辆出行起讫点,路段和交叉口)组成,图中o点和d点是车辆的起讫点,c1,c2,
…
,c4,
……
是该路径所包含的交叉口,oc1,c1c2,
……
是该路径所含路段。
[0041]
如图3所示,对于某个具体的路段i,假设已经掌握时刻t及以前的行程时间序列 {x
i1
,x
i2
,
…
,x
it
},x
i1
,x
i2
,
…
,x
it
分别为路段i在时刻1,2,
…
,t的行程时间数据,t为当前时刻。利用时刻t及以前的数据对未来时刻t 1,t 2,t 3,
…
的行程时间进行预测,可得到而当到了时刻t 1的时候,x
i(t 1)
已经成为已知,这时,对于t 2,t 3,
…
等时刻的预测就不能再用原来的因为它们只是利用了时刻t及以前的信息,并未利用x
i(t 1)
,而x
i(t 1)
才是最新的信息,此时,可以根据时刻t 1的真实值x
i(t 1)
和时刻t对时刻t 1的预测值之间的误差分析,对时刻t 2,t 3,t 4的预测值进行动态修正,得到同时对时刻t 5的行程时间进行预测,得到如此继续,是一个逐期、动态修正误差的过程。
[0042]
并且,根据各路段行程时间的动态误差修正值,进行错时累加,可实现路径行程时间的滚动预测。
[0043]
对于平稳时间序列,自回归移动平均模型arma(auto
‑
regressive and moving averagemodel)可以提供精确度较高的短期预测,它将预测对象随时间变化形成的序列,看作是一个随机序列。其基本思想是:一列随时间变化而又不相互关联的数字序列,可以用相应的模型加以近似描述。通过对相应数学模型的分析研究,能从本质上认识这些动态数据的内在结构和演化规律,从而达到在最小方差意义下的最佳预测。
[0044]
现实问题中的许多时间序列都是非平稳的,不能直接使用自回归移动平均模型,但是可以通过差分一次或多次把原序列转换为平稳时间序列,再用arma模型进行建模。
[0045]
如果w
t
=δ
d
y
t
是平稳序列,就称y
t
是d阶齐次非平稳序列,这里δ表示差分,即δy
t
=y
t
‑
y
t
‑1δ2y
t
=δy
t
‑
δy
t
‑1[0046]
如果有序列w
t
,可以通过对w
t
求和d次而得到y
t
,即求和算子和差分算子是互逆运算。
[0047]
如果w
t
=δ
d
y
t
且w
t
是一个arma(p,q)过程,则称y
t
是(p,d,q)阶综合自回归移动平均过程,简称为arima(p,d,q),其一般形式为
[0048]
φ(b)δ
d
y
t
=δ θ(b)ε
t
[0049]
其中:
[0050]
φ(b)=1
‑
φ1b
‑
φ2b2‑…‑
φ
p
b
p
[0051]
θ(b)=1
‑
θ1b
‑
θ2b2‑…‑
θ
q
b
q
[0052]
称φ(b)为自回归算子,θ(b)为移动平均算子,b
k
表示k步移位算子,即 b
k
x
t
=x
t
‑
k
,b
k
c≡c(c是常数)。
[0053]
这个模型就称为(p,d,q)阶arima模型,记为arima(p,d,q),若q=0,称为综合自回归模型ari(p,d,0),若p=0,称为综合移动平均模型ima(0,d,q)。
[0054]
对于给定的序列y
t
,首先要确定转换为平稳序列需要差分的次数d。利用平稳序列
的自相关函数ρ
k
随着k的增大而下降为0的结果来确定d.即:首先检查原序列y
t
的自相关函数,确定y
t
是否平稳,如果不平稳,对序列进行差分,检查差分后的序列δy
t
的自相关函数。重复这个步骤直到有某个d使得w
t
=δ
d
y
t
是平稳的为止,即它的自相关函数随着k的增大而趋于0。
[0055]
为了确定p和q,需要计算平稳序列w
t
=δ
d
y
t
的自相关函数和偏自相关函数。对于低阶的arma过程,可以依据自相关函数和偏自相关函数的截尾性和拖尾性进行识别。如果过程的自回归和移动平均部分都是高阶的,需要先假定一组值,然后进行参数估计,之后通过计算已估arma(p,q)模型残差项的自相关函数,确定是否为白噪声(白噪声是由一个无关的随机变量序列构成的纯随机过程),如果不是白噪声,则重新进行模型确认。
[0056]
假设已经选择好arima模型φ(b)δ
d
y
t
=φ(b)w
t
=δ θ(b)ε
t
的p,d,q值,现在需要估计p个自回归参数φ1,φ2,
…
,φ
p
和q个移动平均参数θ1,θ2,
…
,θ
q
,选择的参数值必须使时间序列实际值w
t
=δ
d
y
t
和拟合值之差的平方和最小。如果时间序列的观察个数相对模型的阶数而言比较大,参数估计可采用非线性回归方法。
[0057]
参数估计后,应该考查所建模型的优劣性,即评价模型是否有能力对未来进行准确的预测,是否有能力提供对预测性质较好的理解。可以通过检验模型残量是否为白噪声,如果是白噪声序列,则认为模型是合理的,可以用来进行预测;否则,应当进一步改进模型。
[0058]
对于某个具体路段的行程时间数据序列{x
t
},建立arma模型:
[0059]
φ(b)x
t
=θ(b)ε
t
[0060]
将其改写成传递形式:
[0061][0062]
其中{g
j
}为格林函数或传递函数,且
[0063]
g0=1,
[0064]
将下标t l代入(4)得到:
[0065][0066]
预测只能建立在时刻t之前的信息基础上,根据最小均方误差预测的第二个准则,以及平稳可逆序列可以表示成传递函数的形式,可以将预测值表示成如下形式:
[0067][0068]
权系数在预测误差的方差达到最小的意义下确定,此时即时刻t向前l步预测公式为:
[0069][0070]
行程时间的预测具有不确定性,预测的不确定性指的是预测值与实际值之间的误
差的不确定性,可以通过预测的置信区间来描述。
[0071]
利用时刻t之前的信息,向前l步预测的预测误差为:
[0072][0073]
预测误差的方差
[0074][0075]
其中,为白噪声ε
t
的方差。
[0076]
对于正态过程,预测误差的分布为:
[0077]
e
t
(l)~n(0,d(e
t
(l)))
[0078]
可以得出:
[0079][0080]
所以,对x
t 1
预测的95%的置信区间为[133]:
[0081][0082]
特别的,当l=1时,向前一步预测的95%置信区间为:
[0083][0084]
当l=2时,向前两步预测的95%置信区间为:
[0085][0086]
当l=3时,向前三步预测的95%置信区间为:
[0087][0088]
由此也可以看出,随着预测时间点的加大,预测误差的置信区间也越大,预测结果越不准确。因此,为了保证行程时间的预测值更加准确,更加的接近真实值,对预测值进行修正是非常有必要的。
[0089]
而根据预测公式,可以得到时刻t向前l 1步预测值为:
[0090][0091]
时刻t 1的向前l步预测为:
[0092][0093]
于是,
[0094][0095]
又arma模型时刻t的向前l步的最小均方误差预测误差为:
[0096][0097]
特别的,当l=1时,向前一步预测的误差为:
[0098][0099]
可以得:
[0100][0101]
其中,称为动态误差修正因子。这可以说明,新的预测值是在旧的预测值的基础上,加上一个动态误差修正因子推算出来的,而该误差修正因子比例于旧的一步预测误差,比例系数随着预测的超前步数的变化而变化。
[0102]
其中,动态误差修正预测的步骤如下:
[0103]
路段行程时间逐期、动态修正误差预测的具体步骤如下:
[0104]
(1)输入行程时间序列{x1,x2,
…
,x
t
},确定时间序列模型arima(p,d,q)的阶数p,d,q;
[0105]
(2)估计p个自回归参数φ1,φ2,
…
,φ
p
和q个移动平均参数θ1,θ2,
…
,θ
q
;
[0106]
(3)检验模型残量是否为白噪声,如果是,则继续下一步;否则,转(1);
[0107]
(4)计算模型的传递函数:g0=1,
[0108]
(5)计算时刻t向前l(l=1,2,3,
…
)步的预测值(向前预测的步数,可根据实际需要确定) 及其95%置信区间
[0109][0110][0111]
(6)根据时刻t 1的实际值和时刻t的预测值,对时刻t 1向前l(l=1,2,3,
…
)步的预测值进行动态修正
[0112][0113]
在此基础上,对于路径行程滚动模型而言,
[0114]
假设起点o至终点d之间的路径包含有k个路段,在时刻t已经获得每一条路段向前l 步的行程时间预测值:
[0115][0116]
时刻t的预测结果可以表示为如下矩阵:
[0117][0118]
矩阵元素x
mn
表示第m个(m=1,2,
…
,k)路段第l时刻n=1,2,
…
,l的行程时间预测值。对矩阵的每一列求平均,可以得到t时刻每一个路段的平均行程时间:
[0119][0120]
根据时刻t各路段的行程时间预测值以及各路段的平均行程时间,可以得到时刻t路径的行程时间预测值:
[0121]
[0122]
在t 1时刻,根据每个路段实测的真实行程时间x
1t
,x
2t
,x
3t
,
…
,x
kt
对t时刻的预测值进行误差修正,得到t 1时刻各路段前l步的行程时间预测值:
[0123][0124]
同样,时刻t 1的预测结果也可以表示为如下矩阵:
[0125][0126]
同样,对矩阵的每一列求平均,可以得到t 1时刻每一个路段的平均行程时间:
[0127][0128]
根据时刻t 1各路段的行程时间预测修正值以及各路段的平均行程时间,可以得到时刻 t 1路径行程时间的滚动预测值:
[0129][0130]
继续下去,可以获得如下一系列随时间变化的行程时间滚动预测结果矩阵:
[0131][0132]
其中,矩阵元素x
ij
表示第i个(i=1,2,
…
,k)路段时刻j(j=1,2,
…
,h)的行程时间预测值。矩阵的每一行表示某个时刻所有路段的行程时间预测值,每一列对应的是某个路段不同时刻的预测值。
[0133]
同样的,可以得到随时间变化的各路段平均行程时间
[0134][0135]
同样根据每一路段的行程时间预测值以及各路段的平均行程时间,则可以得到一系列路径行程时间的滚动预测值:
[0136][0137]
效果评价
[0138]
以杭州的三条路径进行数据调查,分别对三条路径的行程时间进行滚动预测。
[0139]
第一条路径沿天目山路上自西向东,从紫金港路至湖墅南路,如图4所示;
[0140]
第二条路径沿莫干山路自南向北,从凤起路至登云路,如图5所示;
[0141]
第三条路径沿天目山路——环城西路——凤起路,从教工路至延安路,如图6所示;
[0142]
因为算法形同,下面仅以第三条路径为例,选取2009年6月6日7:00
‑
9:00的时间间隔为1分钟的原始行程时间数据,给出路径行程时间预测的具体计算过程。
[0143]
首先根据各路段历史行程时间序列数据,分别建立时间序列模型,因为各路段时间序列模型的构建过程类似,下面以16号路段为例,说明时间序列模型的构建过程。
[0144]
根据16号路段的行程时间序列数据的变化情况,此序列为非平稳时间序列。对其进行一阶差分,差分后数据的自相关函数和偏自相关函数如图7所示,偏自相关函数前三项明显不为零,因此,p=3,自相关函数第一项明显不为零,第二项第三项恰好落在置信区间内,为了全面,q可以取1,或2,或3.针对p,q不同的组合值,计算aic值,见表1。当p=3,q=3 时,aic的最小值为14.67,因此,采用p=3,q=3作为模型的阶,。
[0145]
表1不同p,q组合对应的aic值
[0146]
(p,q)(3,1)(3,2)(3,3)aic21.0617.8514.67
[0147]
其余各路段时间序列模型的建立过程类似,所有路段的时间序列模型结构如表2所示:
[0148]
表2各路段时间序列模型结构
[0149]
16号路段17号路段18号路段19号路段20号路段21号路段arima(3,1,3)arima(3,1,1)arima(4,1,2)arima(2,1,2)arima(3,1,3)arima(3,1,2)
[0150]
下面根据各路段所建时间序列模型,进行行程时间预测。在9:00分别对各路段进行向前10步的行程时间预测,结果见表4:
[0151]
表4 9:00各路段向前10步预测结果
[0152]
表4 9:00各路段向前10步预测结果
[0153][0154][0155]
根据表4,得到路径在9:00初始的预测时间值:
[0156][0157]
9:01时刻,根据各路段真实的行程时间,对表4中9:01时刻的各预测值进行误差修
正,得到9:01各路段向前10步的预测结果,见表5:
[0158]
表5 9:01各路段向前10步误差修正预测结果
[0159][0160]
根据表4和表5,得到路径在9:01时刻的行程时间预测值:
[0161][0162]
9:02时刻,根据各路段真实的行程时间,对表5中9:01时刻的各预测值进行误差修正,得到9:02各路段向前10步的预测结果,见表6:
[0163]
表6 9:02各路段向前10步误差修正预测结果
[0164][0165][0166]
根据表5和表6,得到路径在9:02时刻的行程时间预测值:
[0167][0168]
继续上述步骤,至到9:59,共得到60个路径的行程时间滚动预测值。
[0169]
下面采用绝对平均百分误差(mape)和最大绝对相对误差(maxage),两个指标进行预测效果的比较。两个评价指标的计算公式为:
[0170][0171][0172]
其中t是预测次数,y(t)是真实值,是预测值
[0173]
汇总所选择的三条典型路径的误差评价,对比结果见表7:
[0174]
表7三条典型路径行程时间预测误差对比
[0175][0176]
可以看出,滚动预测方法的预测结果更为准确,更接近实际值,各条路径预测值的平均相对误差远小于10%,最大绝对误差均小于15%,精度远远大于直接累加的方法。
[0177]
本发明通过分析路径行程时间和路段行程时间的相互关系,以及预测本身具有的特性,综合考虑交通预报系统的需求和影响,构建了路径行程时间滚动预测模型:首先对路段行程时间进行动态误差修正预测,然后对各路段的行程时间进行错时累加,最终得到路径行程时间的预测值。最后,结合杭州市道路的实际采集数据,选取道路网络中的三条路经,对文中提出的路径行程时间滚动预测算法进行了实例验证,并和直接累加法进行了对比分析,进一步验证了算法的有效性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

