基于联网adas调查路域交通违法行为时空特征的方法
技术领域
1.本发明涉及交通安全及智能交通领域,尤其涉及一种基于联网adas调查路域交通违法行为时空特征的方法。
背景技术:
2.我国道路交通事故频发,道路交通事故致死率高居不下。近年来,随着电子产业和it行业的迅猛发展,基于图像处理的道路交通监控、管理越来越多的应用到了道路交通安全研究中。
3.据统计,我国70%以上的道路安装有监控摄像头,基于监控摄像头的道路交通车辆违法行为记录与监控,可利用图像处理与模式识别的方法,识别道路交通环境中的车道线、信号灯、标志标线等,根据车辆的轨迹特性、运动状态判断车辆的运动模式,为采集交通违法行为提供有力证据。然而,在一些路侧摄像头无法覆盖或因道路交通形成遮挡导致摄像头无法拍摄的情况下,交通事故肇事者往往会存在投机心理,为事故的侦破带来一定的困难。此外,交管部门安装的电子警察仅能覆盖很小的区域或极少的路段,只能在特定区域实现违法取证,不能覆盖全路网。
4.目前,具有丰富功能和强大环境感知能力的adas已普遍应用于小汽车和营运车辆,这让adas获取大量交通违法行为数据成为可能。然而,目前adas采集的数据多离线使用,未联网上传有效数据,无法全面采集交通违法行为。针对目前情况而言,大量装备有adas的车辆采集的交通数据经联网整合、分析后能够为调查交通违法行为提供充足的数据源,若能利用联网adas数据记录分析前方车辆的违法行为,则能充分利用现有资源,为区域交通事故风险防控提供支撑。
技术实现要素:
5.本发明主要目的提供一种基于联网adas调查路域交通违法行为时空特征的方法,该方法能够快了解违法行为分布的状态,为道路交通风险防控提供支撑。
6.本发明所采用的技术方案是:
7.提供一种基于联网adas调查路域交通违法行为时空特征的方法,包括以下步骤:
8.s1、获取城市道路交通系统内所有联网adas车辆在行驶过程中感知到的前向车辆交通违法行为信息;
9.s2、对获取的交通违法行为信息进行编码,确定交通违法行为发生的时刻和该时刻下违规车辆所处的位置,将交通违规编码、违规时间和违规车辆经纬度打包为结构化数据;
10.s3、将结构化数据上传至交通数据云平台,根据时间信息和经纬度信息将交通违法行为在选定区域道路内的路段上进行匹配,输出各时间段内交通违法行为时空分布图;
11.s4、对道路交通违法行为时空状态进行统计分析,获取各路段交通违法行为发生频次;并对道路交通违法行为时空分布状态进行聚类分析,得到交通违法行为的聚集路段
和聚集时段。
12.接上述技术方案,车辆交通违法行为信息包括违规停车、违法换道、超速行驶、违法掉头/左转、压线行驶、车辆逆行、行人横穿马路、行车/车辆闯红灯。
13.接上述技术方案,步骤s1中,城市道路交通系统根据联网adas车辆通过视频采集摄像头采集的前向道路交通视频,通过定位和图像识别方法进行车道线识别、车辆特征识别、车辆运动轨迹识别、信号灯识别、道路标志标线识别,再基于识别的基本道路信息与前向车辆信息,通过机器学习算法识别前向车辆交通违法行为。
14.接上述技术方案,步骤s3的具体方法为:
15.采取相邻交叉口为一路段原则,将城市区域划分为n个的路段,并采集各个交叉口中心点o处的经纬度信息l
n
、b
n
,两个交叉口之间的实际距离为路段长度,并按照依次顺序将路段编号为1、2
……
n,n为自然数;
16.将一次违法行为结构化数据作为一个数据点,根据采集到的经纬度坐标在城市地图中将数据点匹配到各个目标路段,获得交通违法行为时空分布图。
17.接上述技术方案,步骤s4的具体方法为:
18.匹配出目标路段的交通违法行为分布情况后,先对路段的交通违法行为进行统计,记录目标时间段内各种违法行为发生的频次;再对匹配在路段上的交通违法行为进行时空聚类,空间聚类基于交通违法行为的经纬度位置分布,时间聚类基于交通违法行为在时间轴上的分布,所得时空聚类中心为交通违法行为在时间和空间上的聚集点。
19.接上述技术方案,步骤s4中,将交通违法行为的结构化数据中记录的时间信息进行整合,按照时间戳划分为白天、黑夜,或者早高峰、晚高峰的感兴趣时间段,然后再利用经纬度信息将交通违法行为与选定道路区域内的对应路段进行关联,通过统计和聚类分析获取对应路段在特定时间段内交通违法行为分布情况和聚集情况,对不同时间段不同路段的违法行为发生情况进行辨识。
20.本发明还提供一种基于联网adas调查路域交通违法行为时空特征的系统,包括:
21.信息获取模块,用于获取城市道路交通系统内所有联网adas车辆在行驶过程中感知到的前向车辆交通违法行为信息;
22.编码模块,用于对获取的交通违法行为信息进行编码,确定交通违法行为发生的时刻和该时刻下违规车辆所处的位置,将交通违规编码、违规时间和违规车辆经纬度打包为结构化数据;
23.匹配模块,用于将结构化数据上传至交通数据云平台,根据时间信息和经纬度信息将交通违法行为在选定区域道路内的路段上进行匹配,输出各时间段内交通违法行为时空分布图;
24.分析模块,用于对道路交通违法行为时空状态进行统计分析,获取各路段交通违法行为发生频次;并对道路交通违法行为时空分布状态进行聚类分析,得到交通违法行为的聚集路段和聚集时段。
25.接上述技术方案,匹配模块具体用于:
26.采取相邻交叉口为一路段原则,将城市区域划分为n个的路段,并采集各个交叉口中心点o处的经纬度信息l
n
、b
n
,两个交叉口之间的实际距离为路段长度,并按照依次顺序将路段编号为1、2
……
n,n为自然数;
27.并将一次违法行为结构化数据作为一个数据点,根据采集到的经纬度坐标在城市地图中将数据点匹配到各个目标路段,获得交通违法行为时空分布图。
28.接上述技术方案,分析模块具体用于:
29.匹配出目标路段的交通违法行为分布情况后,先对路段的交通违法行为进行统计,记录目标时间段内各种违法行为发生的频次;再对匹配在路段上的交通违法行为进行时空聚类,空间聚类基于交通违法行为的经纬度位置分布,时间聚类基于交通违法行为在时间轴上的分布,所得时空聚类中心为交通违法行为在时间和空间上的聚集点。
30.本发明还提供了一种计算机存储介质,其可被处理器执行,其内存储有计算机程序,该计算机程序执行上述技术方案所述的基于联网adas调查路域交通违法行为时空特征的方法。
31.本发明产生的有益效果是:本发明利用联网adas车辆即可测得所需要的信息,不需要布设检测器,减少了大量路侧设备需求。且本发明利用联网adas识别和统计路域交通违法行为,可进一步分析得出违法行为聚集路段和聚集时段,能准确、实时地反应交通违法行为的特征,对于提升道路风险防控水平具有一定意义。
附图说明
32.下面将结合附图及实施例对本发明作进一步说明,附图中:
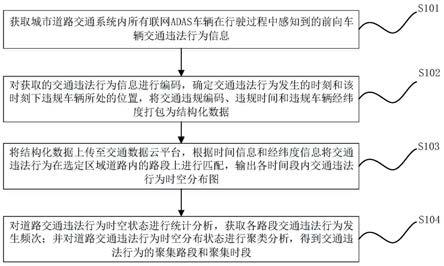
33.图1是本发明实施例基于联网adas调查路域交通违法行为时空特征的方法的流程图;
34.图2是本发明另一实施例基于联网adas调查路域交通违法行为时空特征的方法的流程图;
35.图3a为前方车辆部分违规行为监控记录压线行驶示意图;
36.图3b为前方车辆部分违规行为监控记录违规掉头示意图;
37.图4为划分路段方法示意图;
38.图5为交通违法行为空间分布特征示意图;
39.图6是本发明实施例基于联网adas调查路域交通违法行为时空特征的系统结构示意图。
具体实施方式
40.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
41.本发明的主要思路是:第一步是使用adas(advanced driver assistant system,adas)中内置的图像处理算法提取并分析车辆行驶过程中车载摄像头记录的前向视频信息,识别前方车辆的违法行为,并将adas采集的交通违法行为进行编码。第二步是将大量安装有联网adas车辆收集的车辆违法行为编码及对应的时间信息和gps即时获取的位置信息打包上传至交通数据云平台,然后使用地图匹配算法将采集的道路交通违法行为匹配到区域路段。第三步是根据交通数据云平台中违法行为数据,可对不同路段、时间段、违法行为进行初步统计性,对获取的道路交通违法行为时空分布状态进行聚类分析,可得到交通违
法行为的聚集路段和聚集时段。
42.如图1所示,本发明一个实施例基于联网adas识别和统计路域交通违法行为时空特征的方法包括步骤:
43.s101、获取城市道路交通系统内所有联网adas车辆在行驶过程中感知到的前向车辆交通违法行为信息;
44.s102、对获取的交通违法行为信息进行编码,确定交通违法行为发生的时刻和该时刻下违规车辆所处的位置,将交通违规编码、违规时间和违规车辆经纬度打包为结构化数据;
45.s103、将结构化数据上传至交通数据云平台,根据时间信息和经纬度信息将交通违法行为在选定区域道路内的路段上进行匹配,输出各时间段内交通违法行为时空分布图;
46.s104、对道路交通违法行为时空状态进行统计分析,获取各路段交通违法行为发生频次;并对道路交通违法行为时空分布状态进行聚类分析,得到交通违法行为的聚集路段和聚集时段。
47.如图2所示,本发明另一实施例基于联网adas识别和统计路域交通违法行为时空特征的方法,该方法包括:
48.s1、adas车辆在行驶过程中实时记录前向交通运行状况视频信息,借助集成于视频摄像头中的识别处理器模块,对记录的视频进行解析,感知并采集前向车辆交通违法行为。
49.前向车辆交通违法行为信息,包括违规停车、违法换道、超速行驶、违法掉头/左转、压线行驶、车辆逆行、行人横穿马路、行车/车辆闯红灯等。
50.需要说明的是,本发明的交通违法行为识别采集系统包括视频采集摄像头、定位模块和识别处理器模块,视频采集摄像头。
51.视频采集摄像头具有常规监控功能外,还内置有图像处理算法,能智能识别前方车辆、车道线、路旁标志(如禁停、严禁掉头等)、标线(虚实线、网格线等)和红绿灯等信息。
52.定位模块采用gps、北斗等高精度导航装置,能获取本行车记录仪精确的经纬度信息、准确时间信息,结合摄像头的拍摄范围,可较为准确的判断前方车辆违法行为的位置信息、准确时间信息。
53.识别处理器模块内置在视频采集摄像头中,摄像头所实现的功能依赖于处理器内置的算法,该识别处理模块基于嵌入式系统,用于对视频摄像头采集到的信息进行处理,同时读取违规时的定位模块存储的位置信息。识别处理器模块为本系统的核心。该模块基于嵌入式系统,集成有各种图像识别算法,包括车道线识别、车辆特征识别、车辆运动轨迹识别、信号灯识别、道路标志标线识别等。
54.如图3a所示,处理器可检测到前方车辆与车道线的相对位置,发现前方车辆的压线行驶行为时本系统即自动触发,进行数据存储与抓拍;处理器内置的芯片可智能识别各类标志标线,在图3b所示,处理器识别到前方的“禁止掉头”标志,同时根据前方车辆的轨迹识别出车辆存在掉头的运动模式,此时,系统亦自动启动,开始记录前方车辆的违法行为。
55.s2、对获取的交通违法行为进行编码,确定交通违法行为发生的时刻和该时刻下违规车辆所处的位置,将交通违规编码、违规时间和违规车辆经纬度打包为结构化数据。
56.需要说明的是,每种交通违法行为的编码均是唯一的,adas在识别出前方车辆的违法行为后,结合视频采集摄像头和定位模块中的高精度导航系统可较为准确的判断前方车辆违法行为的位置信息、准确时间信息。将交通违法行为编码、交通违法行为发生时间和交通违法行为发生位置合并为打包为完整的结构数据,利用车载网络将数据传输至交通数据云平台。
[0057][0058]
s3、将所有装配联网adas车辆采集的结构化数据上传至交通数据云平台,根据时间信息和经纬度信息将交通违法行为在选定区域道路内的路段上进行匹配,输出各时间段内交通违法行为时空分布图。
[0059]
具体为选定区域道路,将区域道路划分成不同的路段,使用地图匹配算法将获取的交通违法行为结构化数据匹配在地图中,与选定区域道路内的路段进行关联。
[0060]
需要说明的是,如图4所示,可采取相邻交叉口为一路段原则将该城市区域划分为n个的路段,并采集各个交叉口中心点o处的经纬度信息l
o
、l
a
,两个交叉口之间的实际距离即为路段长度。然后按照依次顺序将该路段编号为1、2
……
n,每个路段的4个角点表征路段的范围;其中:
[0061]
road
loc
={(l
o1
,l
a1
,),(l
o2
,l
a2
),
…
,(l
on
,l
an
)}。
[0062]
在此基础上,对上传至数据云平台的交通违法行为结构化数据进行路段匹配,获得交通违法行为的时空分布特征。
[0063]
match:{(lon
i
,lat
i
)∈road
loc
,t
i
∈t
seg
,i=1,
…
,n}
[0064]
还可将一次违法行为结构化数据作为一个数据点,根据采集到的经纬度坐标在arcgis的城市地图中将数据点匹配到各个目标路段,获得交通违法行为时空分布图,如图5所示。
[0065]
s4、对道路交通违法行为时空状态进行统计分析,获取各路段交通违法行为发生频次,对道路交通违法行为时空分布状态进行聚类分析,得到交通违法行为的聚集路段和聚集时段。
[0066]
需要说明的是:匹配出目标路段的交通违法行为分布情况后,先对路段的交通违法行为进行统计,记录目标时间段内各种违法行为发生的频次,以早高峰时间段内不同路段的违法行为发生频次为例:
[0067]
[0068][0069]
再对匹配在路段上的交通违法行为进行时空聚类,空间聚类基于交通违法行为的经纬度位置分布,时间聚类基于交通违法行为在时间轴上的分布,根据聚类效果确定聚类数,所得聚类中心即为交通违法行为在时间和空间上的聚集点。
[0070]
如图6所示,本发明实施例基于联网adas调查路域交通违法行为时空特征的系统,包括:
[0071]
信息获取模块,用于获取城市道路交通系统内所有联网adas车辆在行驶过程中感知到的前向车辆交通违法行为信息;
[0072]
编码模块,用于对获取的交通违法行为信息进行编码,确定交通违法行为发生的时刻和该时刻下违规车辆所处的位置,将交通违规编码、违规时间和违规车辆经纬度打包为结构化数据;
[0073]
匹配模块,用于将结构化数据上传至交通数据云平台,根据时间信息和经纬度信息将交通违法行为在选定区域道路内的路段上进行匹配,输出各时间段内交通违法行为时空分布图;
[0074]
分析模块,用于对道路交通违法行为时空状态进行统计分析,获取各路段交通违法行为发生频次;并对道路交通违法行为时空分布状态进行聚类分析,得到交通违法行为的聚集路段和聚集时段。
[0075]
进一步地,匹配模块具体用于:
[0076]
采取相邻交叉口为一路段原则,将城市区域划分为n个的路段,并采集各个交叉口中心点o处的经纬度信息l
n
、b
n
,两个交叉口之间的实际距离为路段长度,并按照依次顺序将路段编号为1、2
……
n,n为自然数;
[0077]
并将一次违法行为结构化数据作为一个数据点,根据采集到的经纬度坐标在城市地图中将数据点匹配到各个目标路段,获得交通违法行为时空分布图。
[0078]
进一步地,分析模块具体用于:
[0079]
匹配出目标路段的交通违法行为分布情况后,先对路段的交通违法行为进行统计,记录目标时间段内各种违法行为发生的频次;再对匹配在路段上的交通违法行为进行时空聚类,空间聚类基于交通违法行为的经纬度位置分布,时间聚类基于交通违法行为在时间轴上的分布,所得时空聚类中心为交通违法行为在时间和空间上的聚集点。
[0080]
上述基于联网adas调查路域交通违法行为时空特征的系统主要用于实现上述实施例基于联网adas调查路域交通违法行为时空特征的方法,模板实现方法的相同功能,在此不赘述。
[0081]
本发明还提供了一种计算机存储介质,其可被处理器执行,其内存储有计算机程序,该计算机程序执行上述实施例的基于联网adas调查路域交通违法行为时空特征的方法。
[0082]
综上,本发明有以下优点:
[0083]
(1)利用adas车辆即可测的所需要的信息,不需要布设检测器,减少了大量路侧设备需求;
[0084]
(2)覆盖范围广,数据精度高,相比现有的违法行为采集技术,利用adas车辆识别和统计交通违法行为能够弥补道路设施覆盖范围不足,更客观直接地反应路段交通违法行为的分布状态。
[0085]
(3)适用性强,本发明提出的方法适合绝大多数的城市,检测设备不易受环境、天气等的影响,且测算精度较高;
[0086]
(4)符合未来交通领域的发展趋势,adas汽车是未来汽车行业发展的方向,也迎合了交通智能化发展的趋势。
[0087]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

