mimo雷达观测噪声优化方法及装置
技术领域
1.本发明涉及雷达噪声分析技术领域,尤其涉及mimo雷达观测噪声优化方法及装置。
背景技术:
2.近年来,鲁棒滤波器的设计一直是现代雷达系统的研究热点之一。出现这种情况的主要原因有两个。首先,目标雷达信号可能会受到噪声、杂波等的干扰,从而导致接收信号统计模型的不确定性。其次,在雷达系统的实际应用中,发射机和接收机的设置会影响测量系统的模型。不幸的是,通过获得或理解真实世界中的精确模型来设计最优滤波器是代价高昂而不可行的,这使得一些与假设模型有很小偏差的名义上的最优滤波器的性能显著下降。因此,在一定的不确定性模型条件下,鲁棒滤波器可以看作是一种最优滤波器。
3.经典的kalman滤波器是动态高斯线性系统下的最优滤波器。它在通信、导航、雷达、控制等领域都得到了较好的应用。然而,它也存在着突出的缺点,例如,完全掌握噪声的统计模型和信号的状态是获得良好性能的前提条件。因此,如何在噪声分布知识缺失或不精确的情况下设计一个鲁棒的kalman滤波器,并能用于解决实际工程问题,对研究人员和开发人员都是一个很大的挑战。
4.现有技术中提出了许多同时估计信号状态和噪声的方法,即采用自适应kalman滤波器进行mimo雷达观测噪声优化,但这类方法往往需要利用大量的数据才能在整个估计周期内获得一定的准确性,无法满足某些特定场景下的实时性要求。
5.因此,亟需一种可以克服上述问题的mimo雷达观测噪声优化方案。
技术实现要素:
6.本发明实施例提供一种mimo雷达观测噪声优化方法,用以进行mimo雷达观测噪声优化,在保证准确性的同时提高噪声优化实时性,该方法包括:
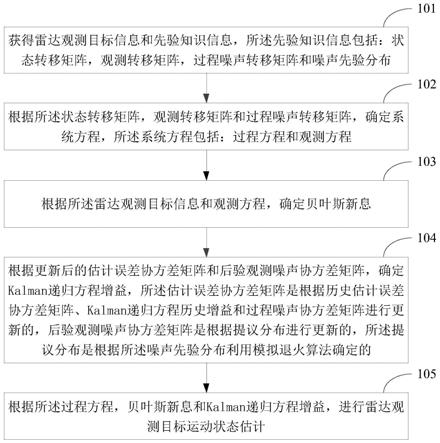
7.获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布;
8.根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程;
9.根据所述雷达观测目标信息和观测方程,确定贝叶斯新息;
10.根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的;
11.根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。
12.本发明实施例提供一种mimo雷达观测噪声优化装置,用以进行mimo雷达观测噪声
优化,在保证准确性的同时提高噪声优化实时性,该装置包括:
13.信息获得模块,用于获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布;
14.方程确定模块,用于根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程;
15.新息确定模块,用于根据所述雷达观测目标信息和观测方程,确定贝叶斯新息;
16.增益确定模块,用于根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的;
17.状态估计模块,用于根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。
18.本发明实施例还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述mimo雷达观测噪声优化方法。
19.本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有执行上述mimo雷达观测噪声优化方法的计算机程序。
20.本发明实施例通过获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布;根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程;根据所述雷达观测目标信息和观测方程,确定贝叶斯新息;根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的;根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。本发明实施例根据噪声先验分布利用模拟退火算法确定提议分布,并根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵确定kalman递归方程增益,进而根据过程方程,贝叶斯新息和kalman递归方程增益实现mimo雷达观测噪声优化,充分考虑了雷达观测目标信息中所包含的丰富噪声统计信息,有效减轻了运算负担,在保证准确性的同时提高噪声优化实时性。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
22.图1为本发明实施例中mimo雷达观测噪声优化方法示意图;
23.图2~图3为本发明具体实施例中mimo雷达观测噪声优化示意图;
24.图4为本发明实施例中mimo雷达观测噪声优化装置结构图;
25.图5是本发明实施例的计算机设备结构示意图。
具体实施方式
26.为使本发明实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本发明实施例做进一步详细说明。在此,本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
27.如前所述,先前的研究者们提出了许多同时估计信号状态和噪声的方法,即所谓的自适应kalman滤波器,但这类方法往往需要利用大量的数据才能在整个估计周期内获得一定的准确性,这一缺陷使得它们无法满足某些特定场景下的实时性要求。因此,误差小且实时性高的鲁棒kalman滤波器成为了目前的优化方向。由于bode、shannon等的开拓性工作,贝叶斯理论在kalman滤波算法中得到了广泛应用。目前,基于贝叶斯的鲁棒kalman滤波方法是利用模型的先验分布信息来提供更精确的统计模型知识,从成本函数和不确定噪声分布的角度,提出了一些最优滤波的方法。实际上,这类方法无法实现最优滤波的目标。它们仅利用了不确定模型的先验分布,而忽略了观测数据中所包含的丰富的噪声统计信息。
28.为了进行mimo雷达观测噪声优化,在保证准确性的同时提高噪声优化实时性,本发明实施例提供一种mimo雷达观测噪声优化方法,如图1所示,该方法可以包括:
29.步骤101、获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布;
30.步骤102、根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程;
31.步骤103、根据所述雷达观测目标信息和观测方程,确定贝叶斯新息;
32.步骤104、根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的;
33.步骤105、根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。
34.由图1所示可以得知,本发明实施例通过获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布;根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程;根据所述雷达观测目标信息和观测方程,确定贝叶斯新息;根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的;根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。本发明实施例根据噪声先验分布利用模拟退火算法确定提议分布,并根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵确定kalman递归方程增益,进而根据过程方程,贝叶斯新息和kalman递归方程增益实现mimo雷达观测噪声优化,充分考虑了雷达观测目标信息中所包含
的丰富噪声统计信息,有效减轻了运算负担,在保证准确性的同时提高噪声优化实时性。
35.实施例中,获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布。
36.实施例中,根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程。
37.本实施例中,按如下公式确定过程方程:
38.x
k 1
=φx
k
γu
k
39.其中,φ为状态转移矩阵(n
×
n矩阵),γ为过程噪声转移矩阵(n
×
p矩阵),x
k
为目标的真实状态(n
×
1向量),u
k
为过程噪声变量(p
×
1零均值随机向量)。
40.本实施例中,按如下公式确定观测方程:
[0041][0042]
其中,h为观测转移矩阵(m
×
n矩阵),x
k
为目标的真实状态(n
×
1向量),v
k
为观测噪声变量(m
×
1零均值随机向量)。
[0043]
实施例中,根据所述雷达观测目标信息和观测方程,确定贝叶斯新息。
[0044]
本实施例中,按如下公式计算贝叶斯新息:
[0045][0046]
其中,为雷达观测目标信息,h为观测转移矩阵,为状态估计量。
[0047]
实施例中,根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的。
[0048]
本实施例中,后验观测噪声协方差矩阵按如下方式进行更新:根据观测方程,确定每一时刻观测的似然函数;根据所述提议分布,利用metropolis
‑
hastings算法确定后验观测噪声期望;根据所述后验观测噪声期望,确定更新后的后验观测噪声协方差矩阵。
[0049]
本实施例中,估计误差协方差矩阵的更新是根据上一时刻的卡尔曼增益和估计误差协方差矩阵,以及过程噪声协方差矩阵进行的,而上一时刻的卡尔曼增益又是通过上一时刻的后验观测噪声协方差矩阵进行更新的。
[0050]
本实施例中,根据所述提议分布,利用metropolis
‑
hastings算法确定后验观测噪声期望,包括:
[0051]
获得不确定噪声参数的初值;
[0052]
根据所述提议分布和不确定噪声参数的初值,确定不确定噪声参数的候选值;
[0053]
根据所述不确定噪声参数的候选值,确定接受率;
[0054]
根据所述接受率,得到不确定噪声参数样本点;
[0055]
根据所述不确定噪声参数样本点,确定后验观测噪声期望。
[0056]
具体实施时,利用观测方程和高斯分布的性质来得到每一时刻观测关于不确定参数θ的似然函数根据的分布特性和系统的观测方程可获得k时刻的观测将的概率密度函数近似为关于不确定噪声
参数θ的似然函数,即
[0057]
具体实施时,利用metropolis
‑
hastings算法来获得后验观测噪声的期望,具体的,选取初值θ0;按提议分布抽取一个候选值θ
cand
;计算接受率α=min{1,f(y
k
|θ
cand
)π(θ
cand
)/f(y
k
|θ
j
‑1)π(θ
j
‑1)};从均匀分布的区间(0,1)内随机选取一个数γ,若γ<α,则θ
j
←
θ
cand
,若γ>α,则θ
j
←
θ
j
‑1,重复上述步骤后获得样本点{θ0,θ1,
…
,θ
m
};计算样本均值,将其近似为后验观测噪声的期望e[π(θ|y
k
)]。对所有时刻的后验噪声期望求平均,获得更新后的后验噪声协方差更新状态协方差其中q为过程噪声协方差矩阵。为kalman递归方程的参数赋初值,包括初始化状态变量,初始化噪声协方差矩阵和初始化误差协方差矩阵;根据更新后的状态协方差、后验观测噪声协方差计算kalman递归方程增益
[0058]
本实施例中,按如下方式确定提议分布:
[0059]
获得初始距离,对应的迭代次数和候选分布;
[0060]
根据候选分布和噪声先验分布,确定该候选分布对应的链接序列,所述链接序列包含多组匹配点;
[0061]
根据所述链接序列,确定每组匹配点对应的距离得到距离序列,取所述距离序列中的最大值;
[0062]
多次移动匹配点得到每次移动对应的新的链接序列,根据所述新的链接序列确定移动后的每组匹配点对应的距离得到新的距离序列,取所述新的距离序列中的最大值,得到一组最大值序列;
[0063]
取所述最大值序列中的最小值作为离散fr
é
chet距离;
[0064]
根据所述离散fr
é
chet距离,利用模拟退火算法确定提议分布。
[0065]
具体实施时,首先是根据候选分布和噪声先验分布确定链接序列,链接序列包含多组匹配点;然后计算确定匹配点所对应距离的最大值,然后多次移动匹配点,再确定多个匹配点对应距离的最大值,再由这组最大值确定其中的最小值为离散fr
é
chet距离,最后根据模拟退火算法寻找离散fr
é
chet距离最小的候选分布为提议分布。具体的,输入候选分布,分别将候选分布和噪声先验分布的波峰部分看作由多点构成的多边形曲线f:{c1,...,c
p
}和g:{h1,...,h
q
},l为两曲线逐点匹配所构成的链接序列,可表示为其中f1=1,g1=1,f
m
=p,g
m
=q,且对于i=1,...,q,必须有f
i 1
=f
i
或f
i 1
=f
i
1,g
i
同理,以此保证曲线中各端点的顺序关系;计算每一匹配点间的距离并取最大值,即在保证顺序关系的基础上移动采样点,并重复计算每一匹配点间的距离并取最大值;计算两条曲线的离散fr
é
chet距离d
df
(f,g)=min{||l||};代入离散fr
é
chet距离作为新解,并计算增量若δd<0,则接受新的离散fr
é
chet距离为新解,并将此候选分布作为提议分布;若δd>0,则以metropolis概率exp(
‑
δd/d)>random(0,1)接受候选分布为提议分布,否则保持提议分布不变重复上述步骤直到满足迭代次数;若新解满足预设条件,则算法结束,若不满足条件,改变初始距离,重复上述步
骤。预设条件为离散弗雷歇距离小于设定值。
[0066]
实施例中,根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。
[0067]
本实施例中,根据所述过程方程,贝叶斯新息和kalman递归方程增益,按如下公式更新状态变量(雷达观测目标运动状态估计):
[0068][0069]
本发明实施例适用于动态高斯线性系统,并假设已知系统方程和观测噪声的先验分布。本发明首先结合离散fr
é
chet距离和模拟退火算法来寻找合适的提议分布;接下来,假设状态变量x
k
服从以估计量为均值,以协方差为方差的多元高斯分布,然后利用观测模型和高斯分布的性质来得到每一时刻观测值的概率密度函数,并将此函数近似为关于参数θ的似然函数;再利用metropolis
‑
hastings算法来获得每一时刻后验观测噪声分布的期望;最后以所有时刻的期望均值为基石来更精确地估计状态变量。
[0070]
下面给出一个具体实施例,说明本发明实施例中mimo雷达观测噪声优化方法的具体应用。在本具体实施例中,如图2所示,一个人以近似匀速的运动方式,在观测区域内按预定的轨迹走动。在实验区域的底部中央放置处放置mimo雷达,以mimo雷达的测量数据作为观测数据(雷达观测目标信息)。为简便起见,假设状态转移矩阵φ、观测转移矩阵h、过程噪声转移矩阵γ恒定,且目标的运动模型为匀速直线运动。x
k
为n
×
1向量,过程噪声u
k
为p
×
1零均值随机向量,观测噪声v
k
为m
×
1零均值随机向量。此时,系统方程可被参数化为过程方程x
k 1
=φx
k
γu
k
和观测方程为得到最优的状态估计,该具体实施例的一种mimo雷达观测噪声优化包括:
[0071]
步骤1,输入先验知识,确定系统方程;
[0072]
步骤2,根据先验噪声分布,利用模拟退火算法寻找最优提议分布,模拟退火算法寻找全局最优解的原理如图3所示。
[0073]
步骤21,为模拟退火算法设置初始参数;
[0074]
步骤22,输入候选分布,分别将候选分布和噪声先验分布的波峰部分看作由多点构成的多边形曲线f:{c1,...,c
p
}和g:{h1,...,h
q
},l为两曲线逐点匹配所构成的链接序列,可表示为其中f1=1,g1=1,f
m
=p,g
m
=q,且对于i=1,...,q,必须有f
i 1
=f
i
或f
i 1
=f
i
1,g
i
同理,以此保证曲线中各端点的顺序关系;
[0075]
步骤23,计算每一匹配点间的距离,并取最大值,即
[0076]
步骤24,在保证顺序关系的基础上移动采样点,重复步骤23;
[0077]
步骤25,计算两条曲线的离散fr
é
chet距离d
df
(f,g)=min{||l||};
[0078]
步骤26,代入离散fr
é
chet距离作为新解,并计算增量
[0079]
步骤27,若δd<0,则接受新的离散fr
é
chet距离,并将此提议分布作为候选分布;若δd>0,则以metropolis概率exp(
‑
δd/d)>random(0,1)接受新提议分布为候选分布,否则保持候选分布不变重复步骤22到27直到满足迭代次数;
[0080]
步骤28,判断若新解满足条件,则算法结束,若不满足条件,降低初始距离,重复步骤22到28。
[0081]
步骤3,为kalman递归方程的参数赋初值;
[0082]
步骤4,输入新的观测数据,并根据观测方程y计算新息
[0083]
步骤5,根据更新后的状态协方差、后验观测噪声协方差计算kalman增益
[0084]
步骤6,利用观测模型和高斯分布的性质来得到每一时刻观测关于不确定参数θ的似然函数
[0085]
步骤61,根据的分布特性和系统的观测方程可获得k时刻的观测
[0086]
步骤62,将的概率密度函数近似为关于不确定噪声参数θ的似然函数,即
[0087]
步骤7,利用metropolis
‑
hastings算法来获得后验观测噪声的期望;
[0088]
步骤71,选取初值θ0;
[0089]
步骤72,按提议分布抽取一个候选值θ
cand
;
[0090]
步骤73,计算接受率α=min{1,f(y
k
|θ
cand
)π(θ
cand
)/f(y
k
|θ
j
‑1)π(θ
j
‑1)};
[0091]
步骤74,从均匀分布的区间(0,1)内随机选取一个数γ,若γ<α,则θ
j
←
θ
cand
,若γ>α,则θ
j
←
θ
j
‑1,重复步骤72到74;
[0092]
步骤75,获得样本点{θ0,θ1,
…
,θ
m
};
[0093]
步骤76,计算样本均值,将其近似为后验观测噪声的期望e[π(θ|y
k
)]。
[0094]
步骤8,对所有时刻的后验噪声期望求平均,获得更新后的后验噪声协方差
[0095]
步骤9,更新状态协方差
[0096]
步骤10,更新状态变量重复步骤4到10。
[0097]
基于同一发明构思,本发明实施例还提供了一种mimo雷达观测噪声优化装置,如下面的实施例所述。由于这些解决问题的原理与mimo雷达观测噪声优化方法相似,因此装置的实施可以参见方法的实施,重复之处不再赘述。
[0098]
图4为本发明实施例中mimo雷达观测噪声优化装置的结构图,如图4所示,该装置包括:
[0099]
信息获得模块401,用于获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布;
[0100]
方程确定模块402,用于根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程;
[0101]
新息确定模块403,用于根据所述雷达观测目标信息和观测方程,确定贝叶斯新息;
[0102]
增益确定模块404,用于根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差
矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的;
[0103]
状态估计模块405,用于根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。
[0104]
一个实施例中,所述后验观测噪声协方差矩阵按如下方式进行更新:
[0105]
根据观测方程,确定每一时刻观测的似然函数;
[0106]
根据所述提议分布,利用metropolis
‑
hastings算法确定后验观测噪声期望;
[0107]
根据所述后验观测噪声期望,确定更新后的后验观测噪声协方差矩阵。
[0108]
一个实施例中,根据所述提议分布,利用metropolis
‑
hastings算法确定后验观测噪声期望,包括:
[0109]
获得不确定噪声参数的初值;
[0110]
根据所述提议分布和不确定噪声参数的初值,确定不确定噪声参数的候选值;
[0111]
根据所述不确定噪声参数的候选值,确定接受率;
[0112]
根据所述接受率,得到不确定噪声参数样本点;
[0113]
根据所述不确定噪声参数样本点,确定后验观测噪声期望。
[0114]
一个实施例中,按如下方式确定提议分布:
[0115]
获得初始距离,对应的迭代次数和候选分布;
[0116]
根据候选分布和噪声先验分布,确定该候选分布对应的链接序列,所述链接序列包含多组匹配点;
[0117]
根据所述链接序列,确定每组匹配点对应的距离得到距离序列,取所述距离序列中的最大值;
[0118]
多次移动匹配点得到每次移动对应的新的链接序列,根据所述新的链接序列确定移动后的每组匹配点对应的距离得到新的距离序列,取所述新的距离序列中的最大值,得到一组最大值序列;
[0119]
取所述最大值序列中的最小值作为离散fr
é
chet距离;
[0120]
根据所述离散fr
é
chet距离,利用模拟退火算法确定提议分布。
[0121]
综上所述,本发明实施例通过获得雷达观测目标信息和先验知识信息,所述先验知识信息包括:状态转移矩阵,观测转移矩阵,过程噪声转移矩阵和噪声先验分布;根据所述状态转移矩阵,观测转移矩阵和过程噪声转移矩阵,确定系统方程,所述系统方程包括:过程方程和观测方程;根据所述雷达观测目标信息和观测方程,确定贝叶斯新息;根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵,确定kalman递归方程增益,所述估计误差协方差矩阵是根据历史估计误差协方差矩阵、kalman递归方程历史增益和过程噪声协方差矩阵进行更新的,后验观测噪声协方差矩阵是根据提议分布进行更新的,所述提议分布是根据所述噪声先验分布利用模拟退火算法确定的;根据所述过程方程,贝叶斯新息和kalman递归方程增益,进行雷达观测目标运动状态估计。本发明实施例根据噪声先验分布利用模拟退火算法确定提议分布,并根据更新后的估计误差协方差矩阵和后验观测噪声协方差矩阵确定kalman递归方程增益,进而根据过程方程,贝叶斯新息和kalman递归方程增益实现mimo雷达观测噪声优化,充分考虑了雷达观测目标信息中所包含的丰富噪声统计
信息,有效减轻了运算负担,在保证准确性的同时提高噪声优化实时性。
[0122]
基于前述发明构思,如图5所示,本发明还提出了一种计算机设备500,包括存储器510、处理器520及存储在存储器510上并可在处理器520上运行的计算机程序530,所述处理器520执行所述计算机程序530时实现前述mimo雷达观测噪声优化方法。
[0123]
基于前述发明构思,本发明提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现前述mimo雷达观测噪声优化方法。
[0124]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
[0125]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0126]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0127]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0128]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

