1.本发明涉及一种基于深度学习的建筑垃圾遥感影像识别方法。
背景技术:
2.遥感图像识别的大致经历了如下几个过程:传统基于象元的遥感图像识别方法,如最大似然法、k
‑
means均值法,但图像光谱亮度信息易受干扰,且这些不能挖掘整体信息,易产生“椒盐噪声”,现在只作为对比项或预处理方法使用;基于面向对象的遥感识别方法,虽然发挥了多边形对象属性特征丰富的优势,但易过分割或欠分割,且分割的尺度不容易确定;同样基于象元的图像语义分割成为了当今遥感图像识别的热门研究方向,其自学习能力和容错能力强的特点源自于深度学习,也奠定了如今成千上万分类方法的研究与实现。
3.不过深度学习方法的有效性也很大程度上取决于训练数据的丰富程度,大量的样本数据成为了研究必备条件。样本扩充可使用翻转等简单数据增强方法获得,也可以用生成对抗网络等机器学习方法进行图片合成来获得。另外,深度学习相关研究方法常常要求训练数据和测试数据特征分布相似,但在实际项目应用中这个要求很难达到,因此深度学习方法因其数据要求,很难在工程项目中被应用。迁移学习作为深度学习研究方法的分支,是目前的一大研究热点。
技术实现要素:
4.本发明的目的是为了解决现有的遥感图像识别方法易受干扰,且这些不能挖掘整体信息,导致识别精度低的问题,而提出一种基于深度学习的建筑垃圾遥感影像识别方法。
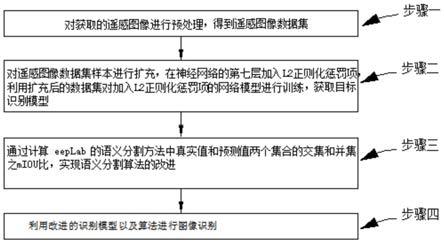
5.一种基于深度学习的建筑垃圾遥感影像识别方法,所述方法通过以下步骤实现:
6.步骤一、对获取的遥感图像进行预处理,得到遥感图像数据集;
7.步骤二、对遥感图像数据集样本进行扩充,在神经网络的第七层加入l2正则化惩罚项,利用扩充后的数据集对加入l2正则化惩罚项的网络模型进行训练,获取目标识别模型;
8.步骤三、通过计算deeplab的语义分割方法中真实值和预测值两个集合的交集和并集之miou比,实现语义分割算法的改进;
9.步骤四、利用改进的识别模型以及算法进行图像识别。
10.优选地,步骤一所述的对获取的遥感图像进行预处理,得到遥感图像数据集的步骤包括:
11.采用envi平台对遥感图像进行正射校正、影像融合的遥感图像预处理操作,并对其结果数据进行直方图均值化操作。
12.优选地,步骤二所述的对遥感图像数据集样本进行扩充的步骤采用改进生成对抗网络的方式融合多个图像的特征,具体步骤包括:
13.gan在原有数据集的基础上生成新的数据,gan生成对抗网络包括两个模型:生成
模型和判别模型,这两个模型的代表符号分别是g和d;利用这两个模型的博弈实现生成对抗网络,
14.其中,gan的基本模型:设z为随机噪声,x为真实数据,生成式网络和判别式网络以分别用g和d表示,其中d可以看作一个二分类器,那么采用交叉熵表示,写作:
15.minmaxv=ex~pdata(x)[logd(x)] ez~pz(z)[log(1
‑
d(g(z)))]
[0016]
其中第一项的logd(x)表示判别器对真实数据的判断,第二项log(1
‑
d(g(z)))表示则对数据的合成与判断;通过这样一个极大极小(max
‑
min)博弈,循环交替地分别优化g和d来训练所需要的生成式网络与判别式网络,直到到达nash均衡点;
[0017]
dcgan是在gan的基础上提出了一种训练架构,dcgan对gan做训练指导,用卷积层取代全连接层,去掉池化层,采用批标准化(batch normalization,bn)技术将判别模型的发展成果引入到了生成模型中。
[0018]
优选地,步骤三所述的通过计算deeplab的语义分割方法中真实值和预测值两个集合的交集和并集之miou比,实现识别模型以及识别语义分割算法的改进的步骤包括:
[0019]
采用deeplab的语义分割方法,通过条件随机性和卷积神经网络的结合,利用全卷积网络作为基础,不断优化每一个层次;然后,计算真实值和预测值两个集合的交集和并集之miou比,实现语义分割算法的改进。
[0020]
本发明的有益效果为:
[0021]
本发明是将深度学习的算法应用到遥感图像的语义分割中去,并且应用在识别遥感图像中的建筑垃圾中,从而节省更多的人力、物力。针对建筑遥感数据集样本较少问题进行图像生成的样本扩充实验,从遥感图像语义分割的角度检测城市建筑垃圾,为城市建筑垃圾遥感监测提供可靠的数据源扩充方法,为建筑垃圾堆存治理提供技术支持。同时对地观测遥感技术具有远距离探测、大面积覆盖、重访周期短等特点,通过此研究不仅可以快速发现建筑垃圾是否清运,掌握其堆放面积等现状信息,还可以监测违规堆放的处理进度,实现动态跟踪监测净化城市环境。
附图说明
[0022]
图1为本发明的方法流程图;
[0023]
图2为本发明涉及的生成对抗网络的基本模型;
[0024]
图3为本发明涉及的dcgan生成器结构图;
[0025]
图4为本发明涉及的deeplabv3 aspp结构。
具体实施方式
[0026]
具体实施方式一:
[0027]
本实施方式的一种基于深度学习的建筑垃圾遥感影像识别方法,如图1所示,所述方法通过以下步骤实现:
[0028]
步骤一、对获取的遥感图像进行预处理,得到遥感图像数据集;
[0029]
步骤二、对遥感图像数据集样本进行扩充,在神经网络的第七层加入l2正则化惩罚项,利用扩充后的数据集对加入l2正则化惩罚项的网络模型进行训练,获取目标识别模型;
[0030]
步骤三、通过计算deeplab的语义分割方法中真实值和预测值两个集合的交集和并集之miou比,实现语义分割算法的改进;
[0031]
步骤四、利用改进的识别模型以及算法进行图像识别。
[0032]
具体实施方式二:
[0033]
与具体实施方式一不同的是,本实施方式的一种基于深度学习的建筑垃圾遥感影像识别方法,步骤一所述的对获取的遥感图像进行预处理,得到遥感图像数据集的步骤包括:
[0034]
由于遥感信息平台整体定位精度和传感器误差率的影响,卫星遥感技术图像中的全色和多光谱图像各层可能无法对齐等原因,需要对卫星遥感图像的进行较多预处理操作,采用envi平台对遥感图像进行正射校正、影像融合的遥感图像预处理操作,并对其结果数据进行直方图均值化操作;提高遥感数据相对位置精度,提高图像质量,增强数据特征。
[0035]
具体实施方式三:
[0036]
与具体实施方式一或二不同的是,本实施方式的一种基于深度学习的建筑垃圾遥感影像识别方法,步骤二所述的对遥感图像数据集样本进行扩充的步骤采用改进生成对抗网络的方式融合多个图像的特征,具体步骤包括:
[0037]
针对建筑遥感数据集样本较少问题进行图像生成的样本扩充实验,并且从遥感图像语义分割的角度检测城市建筑垃圾,为城市建筑垃圾遥感监测提供可靠的数据源扩充方法,为建筑垃圾堆存治理提供技术支持。改进生成对抗网络,提高语义分割网络精度,使生产图像更加接近真实图像。
[0038]
常见的数据扩充有对图像进行翻转、随机的裁剪、旋转、局部的变形,以及使用gan(生成对抗网络)等方法。人工智能的训练是需要大量的数据集的,如果全部靠人工收集和标注,成本是很高的。
[0039]
gan在原有数据集的基础上生成新的数据,从而训练一个更加鲁棒性的模型,gan生成对抗网络包括两个模型:生成模型和判别模型,这两个模型的代表符号分别是g和d;利用这两个模型的博弈实现生成对抗网络,从而让两个模型提高整体的竞争效应。
[0040]
其中,gan的基本模型:设z为随机噪声,x为真实数据,生成式网络和判别式网络以分别用g和d表示,其中d可以看作一个二分类器,那么采用交叉熵表示,写作:
[0041]
minmaxv=ex~pdata(x)[logd(x)] ez~pz(z)[log(1
‑
d(g(z)))]
[0042]
其中第一项的logd(x)表示判别器对真实数据的判断,第二项log(1
‑
d(g(z)))表示则对数据的合成与判断;通过这样一个极大极小(max
‑
min)博弈,循环交替地分别优化g和d来训练所需要的生成式网络与判别式网络,直到到达nash均衡点;生成对抗网络的基本模型如图2所示;
[0043]
dcgan是在gan的基础上提出了一种训练架构,dcgan对gan做训练指导,用卷积层取代全连接层,去掉池化层,采用批标准化(batch normalization,bn)技术将判别模型的发展成果引入到了生成模型中。dcgan生成器结构图附图3所示。此外,dcgan还强调了隐藏层分析和可视化计数对gan训练的重要性和指导作用
[0044]
具体实施方式四:
[0045]
与具体实施方式三不同的是,本实施方式的一种基于深度学习的建筑垃圾遥感影像识别方法,步骤三所述的通过计算deeplab的语义分割方法中真实值和预测值两个集合
的交集和并集之miou比,实现识别模型以及识别语义分割算法的改进的步骤包括:
[0046]
采用deeplab的语义分割方法,通过条件随机性和卷积神经网络的结合,利用全卷积网络作为基础,不断优化每一个层次,让语义分割过程中既可以保证感受野的变化,也能够保留空间方面的位置信息;然后,计算真实值和预测值两个集合的交集和并集之miou比,实现语义分割算法的改进,使之精确度增加。
[0047]
deeplab可以实现对不同特征的提取,对不同分辨率的控制,算法拥有独特的解决方案,通过条件随机性和卷积神经网络的结合,利用全卷积网络作为基础,不断优化每一个层次,让语义分割过程中既可以保证感受野的变化,也能够保留空间方面的位置信息。deeplabv3aspp结构如图4所示。
[0048]
以上仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
