1.本发明是关于医学图像处理领域,特别涉及基于医学影像的长短径估算方法。
背景技术:
2.在医学领域,长径指的是一个目标(如血管、淋巴结、肿瘤等)的外轮廓上长度最长的线段;短径指的是与长径垂直、且在外轮廓上的长度最长的线段。长径、短径连线上的所有点均不超过目标外轮廓区域。长径除以短径即为长径比,可以评价目标接近圆形的程度。长径、短径用于表征目标形态,是一个重要的医学量化特征。例如,颈部淋巴结长径超过正常大小表明淋巴结肿大,而恶性浅表淋巴结的长径比普遍明显高于良性浅表淋巴结,又可以作为判别良恶性的一个依据;长短径也是实体瘤治疗疗效的评估标准之一,以治疗前实体瘤长径长度(不低于20毫米)为基准,通过比较治疗后实体瘤的长径长度的增长或缩小,来判断病情缓解或者恶化。
3.医生一般通过医学影像手段观察并记录目标长短径的情况,以此作为下一步诊断的依据。找到医学影像上的长径需要遍历目标外轮廓上所有点对,然后基于找出的长径找到短径。受限于医生自身水平以及诊断时间限制,医生标记的线段很可能并非医学影像上真正的长径,而只是和长径长度较为接近的某一线段,进而影响到短径的查找。
4.为了能更快、更准确的查找医学图像上的长短径,本发明提出一种基于医学影像的长短径估算方法。
技术实现要素:
5.本发明要解决的技术问题是,克服现有技术中的不足,提供一种基于医学影像的长短径估算方法。
6.为解决技术问题,本发明的解决方案是:
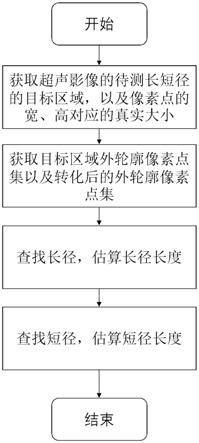
7.提供了一种基于医学影像的长短径估算方法,包括以下步骤:
8.(1)获取超声影像中待测长短径的目标区域图像及像素点对应的真实大小;
9.(2)根据目标区域图像获取外轮廓像素点集,并对其进行坐标转化;
10.(3)基于转化后的外轮廓坐标点集,查找长径的两个端点,并估算长径长度;
11.(4)基于外轮廓坐标集和长径端点,查找短径端点,并估算短径长度。
12.本发明中,所述步骤(1)具体包括:
13.(1.1)将记录了待测长短径的目标区域的超声影像转为等大小的二值图像,以此作为目标区域图像,其每个像素点的像素值为0或者255;0表示背景,即非目标区域,255表示目标区域,即待估算长短径的区域;目标区域图像上有且只有一个连通的目标区域,且图像上每个像素点对应的真实大小均相等;
14.(1.2)获取图像上每个像素点对应的真实宽度以及真实长度。
15.本发明中,所述步骤(2)具体包括:
16.(2.1)通过遍历目标区域图像中的每个像素点的像素值以及该点的八邻域,获得
目标区域外轮廓像素点集合;
17.(2.2)根据目标区域外轮廓像素点集合,将每个像素点的宽度方向坐标值乘以对应的真实宽度大小,长度方向坐标值乘以对应的真实长度大小,得到转化后的外轮廓像素点集。
18.本发明中,所述步骤(3)具体包括:
19.遍历转化后的外轮廓像素点集的点对,通过检查该点对所对应的原始的外轮廓像素点集中的两个坐标点连线是否不超过目标区域为条件,找到符合该条件的、长度最长的那两个坐标点作为长轴端点,并以两个长轴端点之间的距离为长轴长度。
20.本发明中,所述步骤(4)具体包括:
21.过长径端点的连线上的每个点作垂线,得到垂线与目标区域连续重合长度最长的两个点;通过查询转化后的外轮廓像素点集对应的点对,计算点对的长度作为候选短径;以这些候选短径中的最长者作为短径,对应在外轮廓像素点集的两个点即为短径端点,并以两个短径端点之间的距离为短轴长度。
22.与现有技术相比,本发明的有益效果是:
23.1、相较于人工指定超声图像目标区域轮廓的长短径,本发明利用目标区域轮廓可利用计算机进行分析、计算直接获得;尤其对于业务处理量大的超声检查科室而言,可以节省大量时间。
24.2、相较于人工指定超声图像目标区域轮廓的长短径,本发明采用遍历所有外轮廓点的方式,并检查了候选长短径线段上是否有非目标区域的情况;相对于人工操作而言,能够极大提高长短径查找位置的准确性。
附图说明
25.图1为本发明的流程示意图;
26.图2为本发明长径查找示意图;
27.图3为本发明短径查找示意图。
28.图4为关于像素点八邻域的示意图。
具体实施方式
29.申请人认为,如在仔细阅读申请文件、准确理解本发明的实现原理和发明目的以后,在结合现有公知技术的情况下,本领域技术人员完全可以运用其掌握的软件编程技能实现本发明。凡本发明申请文件提及的均属此范畴,申请人不再一一列举。除特别说明的内容之外,本发明所述卷积神经网络的构建方法和训练方法均可采用本领域常规方式,故不再赘述。
30.下面结合附图与具体实施方式,以举例的方式对本发明作进一步详细描述:
31.基于深度学习的超声混合训练方法包括下述过程:
32.(一)获取超声影像中待测长短径的目标区域图像及像素点对应的真实大小;
33.(二)根据目标区域图像获取外轮廓像素点集,并对其进行坐标转化;
34.(三)基于转化后的外轮廓坐标点集,查找长径的两个端点,并估算长径长度;
35.(四)基于外轮廓坐标集和长径端点,查找短径端点,并估算短径长度。
36.过程(一)的具体内容:
37.首先,将记录了待测长短径的目标区域的超声影像转为等大小的二值图像,等大小指的是二值图像与对应的超声影像等宽等高。以此二值图像作为目标区域图像,其每个像素点的像素值为0或者255;0表示背景,即非目标区域,255表示目标区域,即待估算长短径的区域;目标区域图像上有且只有一个连通的目标区域,且图像上每个像素点对应的真实大小均相等。
38.如图2所示,矩形abcd区域即为超声影像中待测长短径的目标区域图像。该图像的宽(水平方向)ab为w,代表水平方向有w个像素点;高(竖直方向)bc为h,代表竖直方向有h个像素点;a点为坐标原点。封闭曲线p1p2p3p4所围成的区域即为事先标注的目标区域,其像素值为255(对应图2中白色),封闭曲线p1p2p3p4外的区域表示背景(对应图2中灰色虚线区域;为便于显示和描述,不采用填黑的方式,而采用灰色虚线填充,下同);
39.然后,获取图像上每个像素点对应的真实宽度w以及真实长度h。
40.传统的医学图像是自带距离信息的,例如dicom图像中附有“像素间隔”(pexel spacing)信息,“像素间隔”定义了图像像素的对应的真实大小。根据实际情况,通过用户输入或者读取图像信息,获取图像上每个像素点对应的真实宽度w以及真实长度h。
41.过程(二)的具体内容:
42.首先,通过遍历目标区域图像中的每个像素点的像素值以及该点的八邻域,获得目标区域外轮廓像素点集s。
43.如图2所示,通过遍历图像中的每个像素点以及该点的八邻域,获得封闭曲线p1p2p3p4外轮廓像素点集合s。图4为对八邻域的说明。如图4的(a)图所示,待确认像素点为中间的p
a
,其像素值为255(白色表示),表明是目标区域的像素点,通过检查其周围的八个像素点的像素值,发现均为255,表明p
a
位于封闭曲线p1p2p3p4内,因此不会被放入外轮廓像素点集合内;图4的(b)图中,待确认像素点为中间的p
b
,其像素值为255,表明是目标区域的像素点,通过检查其周围的八个像素点的像素值,发现既有像素值为255的点也有像素值为0的像素点,表明p
a
位于封闭曲线p1p2p3p4上,因此p
b
被放入外轮廓像素点集合内(在图像边界上的点也属于此类情况);图4的(c)图中,待确认像素点为中间的p
c
,其像素值为255,表明是目标区域的像素点,通过检查其周围的八个像素点的像素值,发现像素值均为0,表明p
c
与封闭曲线p1p2p3p4无关,因此不被放入外轮廓像素点集合内(此类点不应出现在目标图像上);
44.然后,根据目标区域外轮廓像素点集合s,将每个像素点的宽度方向坐标值乘以对应的真实宽度大小,长度方向坐标值乘以对应的真实长度大小,得到转化后的外轮廓像素点集s
′
。
45.所述过程二的实现过程具体示例如下:
46.(2.1)对于宽度为w,高度为h的目标区域图像(w和h均为正整数),通过遍历该图像上的每个像素点,获取外轮廓像素点坐标集s={p1,p2,
…
,p
n
}(n为大于2的正整数)。记图像左上角的像素点为原点(0,0),对于点集s里的每个坐标点p
i
=(x
i
,y
i
)(其中i为1到n之间的正整数;x
i
为0到w
‑
1之间的正整数;y
i
为0到h
‑
1之间的正整数),其坐标点对应的像素值为255,p
i
八邻域内的坐标点有1至7个点的像素值为255(邻域超过图像边界的点的像素值默认为0,下同)。
47.(2.2)对于(2.1)得到的外轮廓像素点坐标点集s的每个坐标点p
i
=(x
i
,y
i
)(其中i为1到n之间的正整数;x
i
为0到w
‑
1之间的正整数;y
i
为0到h
‑
1之间的正整数),得到转换后的坐标p
′
i
=(x
′
i
,y
′
i
)=(w*x
i
,h*y
i
)。进而获得转换后的坐标点集s
′
={p
′1,p
′2,
…
,p
′
n
}。
48.过程(三)的具体内容:
49.基于转化后的外轮廓p1p2p3p4坐标点集s
′
,通过遍历点集上的点对组合,以及检查是否存在连线上有非目标区域点的情况,得到长径端点和长度。举例,在坐标点集s
′
中,计算点对p
′1和p
′2的长度,并发现这两个点对应目标区域图像上的点p1和p2之间均为255,即连线上的点均包含在外轮廓p1p2p3p4,符合长径的条件。在后续的点对枚举中,发现点对p
′1和p
′3的长度超过点对p
′1和p
′2的长度,但通过遍历p
′1p
′3对应目标区域图像上的线段p1p3,发现存在部分点不在目标区域上的情况(即p3p4中间的某些点),不符合长径的条件。最终遍历结束发现p
′1p
′2最长,其对应的两个点p1和p2即为长径的端点;
50.所述过程三的实现过程具体示例如下:
51.(3.1)令length=0.0,i=1,j=2,长径端点a1=p1,a2=p1;转至步骤(3.2);
52.(3.2)若i>n
‑
2,输出长径端点a1,a2并结束;否则转至步骤(3.3);
53.(3.3)若j>=n
‑
1,转至(3.6);否则转至步骤(3.4);
54.(3.4)计算转换后的外轮廓坐标点集s
′
内点对p
′
i
=(x
′
i
,y
′
i
)和p
′
j
=(x
′
j
,y
′
j
)之间的欧式距离若distance>length,则转至步骤(3.5);否则转至步骤(3.6);
55.(3.5)根据p
′
i
和p
′
j
,得到外轮廓像素点坐标集s对应的两个点p
i
=(x
i
,y
i
)和p
j
=(x
j
,y
j
),检查p
i
和p
j
连线上的所有坐标点的像素值是否均为255,若是,则令length=distance,a1=p
i
,a2=pj;然后转至步骤(3.6);
56.(3.6)j=j 1,转至步骤(3.3);
57.(3.7)i=i 1,j=i 1,转至步骤(3.2)。
58.过程(四)的具体内容:
59.基于转化后的外轮廓p1p2p3p4坐标点集s
′
、步骤d得到的长径端点,遍历长径上的点并作垂线,根据垂线与外轮廓p1p2p3p4重合情况,得到短径端点以及短径长度。(按照通常医生对病灶、血管等的长短径测量方式,一般只需要检查长径所在线段上的点即可;若需要,亦可将长径往两边延长。如图3所示,从p3作长径的垂线,发现这条垂线位于长径延长线上,仍可计算长度)。如图3所示,过长径上的点p9作垂线,通过遍历垂线像素值的方式,发现该垂线与外轮廓分别交于p5和p6,可计算这两点对应坐标点集s
′
上的点对p
′5和p
′6之间的距离p
′5p
′6。同理,过长径上的点p8作垂线得到p4p7,但其真实长度p
′4p
′7不如p
′5p
′6,因此p
′5p
′6仍是目前大的短径。最后,在遍历完长径上所有点后,发现p
′5p
′6最长,则p5和p6即为短径端点。
60.所述过程四的实现过程具体示例如下:
61.(4.1)假设两个长径端点的坐标为a1=(x1,y1)和a2=(x2,y2),若x1≠x2,则从a1出发,以水平方向(图像宽度所在方向)1像素为单位,沿向量移动,获得长径所在线段的像素点集合t={c1,c2,
…
,c
m
}(其中m为大于1的正整数,且c1=a1,c
m
=a2;像素点坐标均取下整);若x1与x2相等,则从a1出发,以垂直方向(图像高度所在方向)1像素为单位,沿向量
移动,获得长径所在线段的像素点集合t;
62.(4.2)令length=0.0,i=1,j=2,短径端点b1=c1,b2=c1;转至步骤(4.3);
63.(4.3)若i>m
‑
1,输出短径端点b1,b2并结束;否则转至步骤(4.4);
64.(4.4)过c
i
做垂线,沿垂线检索,直至检索到目标区域图像对应点的像素值为0,获得垂线的两个端点d1=(x1,y1)和d2=(x2,y2),并计算的欧式距离的欧式距离若distance>length,则令length=distance,a1=p
i
,a2=p
j
;转至(4.5);
65.(4.5)i=i 1,转至步骤(4.3)。
66.最后,需要注意的是,以上列举的仅是本发明的具体实施例。显然,本发明不限于以上实施例,还可以有很多变形,除了甲状腺、乳腺之外,还包括具有相同超声特征的其它病种如肝脏等。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
67.此外,申请人需要强调的是,本发明的技术方案只作为长短径的估算方式,不等同于直接测量,受图像分辨率、目标区域勾画等影响,本发明得到的长短径结果不保证和真实结果完全一致,但一般只会有细微偏差。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
