1.本发明涉及水下航行器技术领域,具体是指一种目标跟踪型水下航行器。
背景技术:
2.维护海洋权益事关国家利益,世界各国特别是沿海国家都十分重视海洋权益,将其视为核心利益。随着人工智能的迅速发展,无人装备如无人机、无人水面艇、无人水下航行器等在海洋维权等方面凸显优势。海洋维权装备是保障国家海洋安全和海洋权益的重要基础,应用无人装备进行海洋全方位监视和观测成为我国海洋安全保障能力发展的重要途径。
3.自主式水下航行器(auv)是无人装备的一种,auv不仅可用于海洋资源(多金属结核、石油、天然气等)的勘探,而且可以监视海域的环境情况,甚至可以监视目标国家的战略行动。因此,一种用于海洋维权的目标跟踪型水下航行器亟需发展。
4.鉴于此,发明者在研究现有技术的基础上提出了一种目标跟踪型的水下航行器,结合ai技术,对可疑海洋装备进行跟踪、预警和监视,提升海洋安全保障能力。
技术实现要素:
5.本发明要解决的技术问题是克服以上技术困难,提供一种能够对可疑海洋装备进行跟踪、预警和监视,提升海洋安全保障能力的一种目标跟踪型水下航行器。
6.为解决上述技术问题,本发明提供的技术方案为:一种目标跟踪型水下航行器,包括航行器外壳,所述航行器外壳内部设置有主控板,航行器外壳头部内侧设有设置在主控板上的摄像头,航行器外壳前侧中部设有设置在主控板上的陀螺仪,所述主控板上电性连接有电池,所述航行器外壳上部左右两侧分别安装有机翼,航行器外壳中部左右两侧分别安装有姿态推进器,航行器外壳末端连接有舵机连杆,所述舵机连杆末端通过矢量万向座连接有动力推进器。
7.作为改进,所述航行器外壳头部外侧套接有前o型圈。
8.作为改进,所述航行器外壳尾部外侧套接有后o型圈。
9.一种目标跟踪型水下航行器的使用方法,所述使用方法包括以下步骤:
10.步骤一、摄像头将拍摄到的监视图像反馈给控制台;
11.步骤二、工作人员发现可疑设备时,将可疑设备圈出;
12.步骤三、将目标模板(圈出的可疑设备图像)改为自定义模板,并抽取摄像头获取的每一帧图像作为原始图像,然后对原始图像和目标模板进行预处理,即将两者的分辨率分别调整为255*255*3和127*127*3,然后对两者进行滤波提高图像质量;
13.然后通过dasiamrpn算法对目标图像进行分析处理,具体流程如下:
14.1)、预处理后的图像送入卷积神经网络(cnn)中进行特征提取,提取目标模板的网络和提取待识别图像的网络在结构与参数方面完全一致;
15.2)、通过特征提取网络后的目标模板和待识别图像已经转换为高维特征图,将二
者送入rpn中进行位置预测,rpn网络由两部分组成,一部分是分类分支,用于区分目标和背景,另一部分是回归分支,它将候选区域进行微调;
16.步骤三、通过dasiamrpn算法得出获得目标在图像中的具体位置,具体位置由中心坐标、宽度和高度三项数据组成,当目标移动时,中心坐标会发生变化,通过dasiamrpn算法会计算出中心坐标的偏移量;
17.步骤四、将偏移量信息发送给主控板并输入到pid控制算法中,主控板控制尾部推进器对目标进行跟踪监视。
18.本发明与现有技术相比的优点在于:本发明移动灵活,为能够对水下可疑设备进行跟踪监测提供硬件保障;本发明通过dasiamrpn算法来计算可疑设备的位置变化,并将信息发送给主控板,而后主控板控制航行器跟踪监测,为能够对水下可疑设备进行跟踪监测提供软件保障;且dasiamrpn算法在保留了siamrpn算法准确率和实时性的基础上,提高了模型的鲁棒性,在长期的跟踪中实现了较为准确的效果。
附图说明
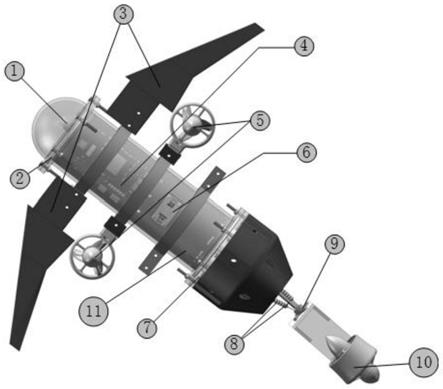
19.图1是本发明一种目标跟踪型水下航行器的结构示意图。
20.图2是本发明一种目标跟踪型水下航行器的目标跟踪算法的流程图。
21.图3是本发明一种目标跟踪型水下航行器的目标跟踪的网络结构图。
22.如图所示:1、摄像头;2、前o型圈;3、机翼;4、主控板;5、姿态推进器;6、陀螺仪;7、后o型圈;8、舵机连杆;9、矢量万向座;10、动力推进器;11、电池。
具体实施方式
23.下面结合实施方式和说明书附图对本发明做进一步的详细说明。
24.一种目标跟踪型水下航行器,包括航行器外壳,所述航行器外壳内部设置有主控板4,航行器外壳头部内侧设有设置在主控板4上的摄像头1,航行器外壳前侧中部设有设置在主控板4上的陀螺仪6,所述主控板4上电性连接有电池11,所述航行器外壳上部左右两侧分别安装有机翼3,航行器外壳中部左右两侧分别安装有姿态推进器5,航行器外壳末端连接有舵机连杆8,所述舵机连杆8末端通过矢量万向座9连接有动力推进器10。
25.其中,所述航行器外壳头部外侧套接有前o型圈2。所述航行器外壳尾部外侧套接有后o型圈7。
26.一种目标跟踪型水下航行器的使用方法,所述使用方法包括以下步骤:
27.步骤一、摄像头将拍摄到的监视图像反馈给控制台;
28.步骤二、工作人员发现可疑设备时,将可疑设备圈出;
29.步骤三、将目标模板圈出的可疑设备图像改为自定义模板,并抽取摄像头获取的每一帧图像作为原始图像,然后对原始图像和目标模板进行预处理,即将两者的分辨率分别调整为255*255*3和127*127*3,然后对两者进行滤波提高图像质量;在训练阶段,还可通过对图像进行翻转和随机裁剪等操作来扩充数据集;
30.然后通过dasiamrpn算法对目标图像进行分析处理,具体流程如下:
31.1、预处理后的图像送入卷积神经网络cnn中进行特征提取,提取目标模板的网络和提取待识别图像的网络在结构与参数方面完全一致;卷积神经网络包含5层卷积和2层池
化,对于模板图像来说,127*127*3的图像首先经过卷积核为11*11、步长为2、通道数位96的第一层卷积,并得到59*59*96的特征图,接着经过池化层来降低分辨率,使得特征图变为29*29*96,再通过卷积核为3*3、步长为2、通道数位256的第二层卷积并池化,得到12*12*256的特征图,最后通过三层连续的卷积核为3*3、步长为1、通道数位128的卷积层,并得到6*6*128的特征图。对于待识别图像来说,最终的特征图为22*22*128。
32.2、通过特征提取网络后的目标模板和待识别图像已经转换为高维特征图,将二者送入rpn中进行位置预测,rpn网络由两部分组成,一部分是分类分支,用于区分目标和背景,另一部分是回归分支,它将候选区域进行微调;对于分类分支,它将给出每个样本被预测为目标和背景的打分。网络将用siamnet提取到的模板和检测帧的特征,用一个新的卷积核进行卷积,在缩小了特征图的同时,产生了大小为4
×4×
(2k
×
256)的模板帧特征和大小为20
×
20
×
256的检测帧特征,他们分别表示的含义是:模板帧特征大小是4
×
4,而且它在k种不同的anchors有k中变化,对每种变化的模板都产生一个特征;检测帧特征大小是20
×
20
×
256。然后,以模板帧的特征作为卷积核(2k个4
×4×
256)去卷积检测帧的特征从而产生响应图。回归分支和分类分支类似,不过它给出的是每个样本的位置回归值,其中包含dx,dy,dw,dh四个值,这些值分别对应目标在图像的中心位置和宽高。
33.步骤三、通过dasiamrpn算法得出获得目标在图像中的具体位置,具体位置由中心坐标、宽度和高度三项数据组成,当目标移动时,中心坐标会发生变化,通过dasiamrpn算法会计算出中心坐标的偏移量;
34.步骤四、将偏移量信息发送给主控板4并输入到pid控制算法中,主控板4控制尾部推进器对目标进行跟踪监视。
35.以上对本发明及其实施方式进行了描述,这种描述没有限制性。如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
