一种基于声信号多特征融合的cmt焊接缺陷识别方法
技术领域
1.本发明涉及交通装备制造领域。
背景技术:
2.cmt焊接是轨道交通装备制造业中最广泛应用的一种的焊接方式,焊接缺陷是工件疲劳断裂潜在的损坏方式,由于焊接缺陷导致的疲劳断裂具有很强的隐蔽性,一旦发生,会酿成灾难性事故,造成严重经济损失,因此,分析焊接缺陷时准确识别、定位缺陷部位,对确保轨道车辆安全运行意义重大。
3.目前对于焊接缺陷的信号分析,主要是通过某种信号分析方法,得到对某个单一信号分析的定性评价,缺乏对多种角度的综合分析,因此,如何构建多特征融合的特征值,揭示焊接缺陷发生位置是目前研究的重点。在现有的信号分析方法中,单一信号分析方法仅仅从某一角度对信号进行了分析,即便分析效果很明显但也有片面之处,导致分析出的结果不准确,不能精准的定位缺陷位置及确定缺陷类型。针对上述存在的问题,研究设计一种新型的cmt焊接缺陷识别方法,克服现有cmt焊接缺陷识别方法中所存在的问题是十分必要的。
技术实现要素:
4.为了解决现有的焊接缺陷识别方法存在的上述问题,本发明提供了一种基于声信号多特征融合的cmt焊接缺陷识别方法。
5.本发明为实现上述目的所采用的技术方案是:一种基于声信号多特征融合的cmt焊接缺陷识别方法,包括如下步骤:
6.s1.向焊接处传递声信号,使用传声器与采集卡对焊接过程中的声信号进行采集;
7.s2.使用带通滤波器对采集的声信号数据进行滤波;
8.s3.对滤波后的数据进行分析,分析方法包括小波变换、梅尔频谱、短时傅里叶变换和小波包分解;
9.s4.将上述分析方法进行多特征融合,获取多特征融合后的数据集;
10.s5.使用卷积层、池化层、全连接层搭建神经网络,将多特征融合后的数据集的一部分作为训练集、另一部分作为测试集,使用神经网络模型对缺陷类型进行识别和分类。
11.优选的,所述步骤s1中所述传声器为bk4954传声器,所述采集卡为usb
‑
4711a采集卡。
12.优选的,所述步骤s2中,对声信号数据进行滤波时,只保留0
‑
1000hz的频率,定义滤波器模型为:
13.data=g*input,
14.其中:g为传递函数,input为输入信号;
15.采用巴特沃斯低通滤波器对声信号进行滤波,所述巴特沃斯滤波器可用如下振幅的平方对频率的公式表示:
[0016][0017]
其中:n为滤波器的阶数,ω为输入频率,ω
c
为截止频率,ω
p
为通频带边缘频率,ω
c
取1khz,ω
p
取1khz,n取一阶滤波器。
[0018]
优选的,所述步骤s3中,采用小波变换对滤波后的数据(data)进行分析,分析模型为cwt=cwt(data),所述小波变换定义为:
[0019][0020]
其中:α为尺度因子,τ为时移因子,ψ,α,τ(t)为母小波ψ(t)经移位和伸缩所产生的一族函数。
[0021]
优选的,所述小波变换使用cmor4
‑
4小波基函数,中心频率为4hz,带宽长度为4,所述尺度因子α选用128,所述时移因子τ由cmor小波基带宽长度确定。
[0022]
优选的,所述步骤s3中,采用梅尔频谱对滤波后的数据(data)进行分析,分析模型为mel=mel(data),所述梅尔频率曲线公式为:
[0023][0024]
其中:f为原频率,f
mel
为梅尔频率。
[0025]
优选的,所述步骤s3中,采用短时傅里叶变换对滤波后的数据(data)进行分析,分析模型为spec=spec(data),所述短时傅里叶变换定义为:
[0026][0027]
其中:t为时域,ω为频域。
[0028]
优选的,所述步骤s3中使用小波包分解对滤波后的数据(data)进行分析,分析模型为wpdec=wpdec(data),所述小波包分解定义为:
[0029][0030]
其中:α为尺度因子,τ为时移因子,ψ,α,τ(t)为母小波ψ(t)经移位和伸缩所产生的一族函数。
[0031]
优选的,所述步骤s4中,所述多特征融合模型为feature=[cwt,mel,spec,wpdec]。
[0032]
优选的,所述步骤s5中,将获取的多特征融合的数据集的70%作为训练集、30%作为测试集,为构建好的特征向量赋予标签,标签选用one
‑
hot编码,第一种缺陷100、第二种缺陷为010、第三种缺陷为001。
[0033]
本发明的一种焊接缺陷识别方法,在分析焊接过程信号中,结合已有数据、考虑故障缺陷的多种情况,使用了多种主流的信号分析方法对声信号进行特征提取如小波变换、小波包分解、梅尔频谱、短时傅里叶变换,并将多种信号特征融合起来,从多角度、多维度对声音信号分析,使用多种神经网络对缺陷部位进行识别分析,正确率、准确率较高,达到了准确定位缺陷位置、缺陷类型的目的,同时在信号预处理时不用过多处理信号,仅需简单处
理信号即可,方法简单,易于操作。
附图说明
[0034]
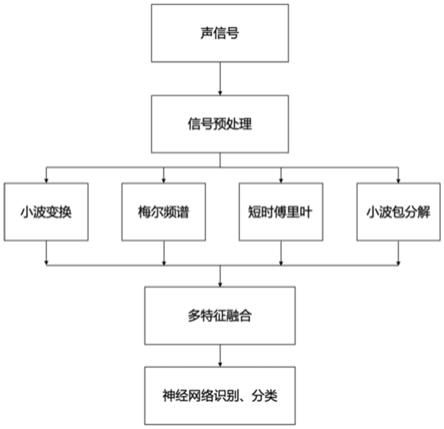
图1是本发明实施例的流程框图。
具体实施方式
[0035]
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
[0036]
本发明的一种基于声信号多特征融合的cmt焊接缺陷识别方法的流程如图1所示,包括以下步骤:
[0037]
s1.建立系统采集模型,向焊接处传递声信号,使用传声器与采集卡对焊接过程中的声信号进行采集,
[0038]
传声器可以选用bk4954传声器,采集卡可以选用usb
‑
4711a采集卡,在声信号预处理时仅需简单处理声信号即可,不用过多的处理声信号;
[0039]
s2.建立系统滤波模型,使用带通滤波器对采集的声信号数据进行预处理滤波,优选只保留0
‑
1000hz的频率,定义滤波器模型为:
[0040]
data=g*input,
[0041]
其中:g为传递函数,input为输入信号;
[0042]
采用巴特沃斯低通滤波器对声信号进行滤波,巴特沃斯滤波器可用如下振幅的平方对频率的公式表示:
[0043][0044]
其中:n为滤波器的阶数,ω
c
为截止频率,ω
p
为通频带边缘频率,ω
c
取1khz,ω
p
取1khz,n取一阶滤波器;
[0045]
s3.建立系统信号分析模型,对滤波后的数据进行分析,分析方法包括小波变换、梅尔频谱、短时傅里叶变换和小波包分解;
[0046]
1)采用小波变换对滤波后的数据(data)进行分析,分析模型为cwt=cwt(data),小波变换定义为:
[0047][0048]
其中:α为尺度因子,τ为时移因子,ψ,α,τ(t)为母小波ψ(t)经移位和伸缩所产生的一族函数,称之为小波基,
[0049]
小波变换可以使用cmor4
‑
4小波基函数,中心频率可以为4hz,带宽长度可以为4,尺度因子α可以选用128,时移因子τ可以由cmor小波基带宽长度确定;
[0050]
2)使用梅尔频谱对滤波后的数据(data)进行分析,分析模型为mel=mel(data),梅尔频率曲线公式为:
[0051]
[0052]
其中:f为原频率,f
mel
为梅尔频率;
[0053]
3)使用短时傅里叶变换对滤波后的数据(data)进行分析,分析模型为spec=spec(data),短时傅里叶变换定义为:
[0054][0055]
其中:t为时域,ω为频域;
[0056]
4)使用小波包分解对滤波后的数据(data)进行分析,分析模型为wpdec=wpdec(data),小波包分解定义为:
[0057][0058]
其中:α为尺度因子,τ为时移因子,ψ,α,τ(t)为母小波ψ(t)经移位和伸缩所产生的一族函数,称之为小波基;
[0059]
s4.建立系统多特征融合模型,将上述分析方法进行多特征融合,获取多特征融合后的数据集,多特征融合模型为feature=[cwt,mel,spec,wpdec];
[0060]
s5.建立系统神经网络模型,使用卷积层、池化层、全连接层搭建神经网络,将多特征融合后的数据集的一部分作为训练集、另一部分作为测试集,优选的,将获取的多特征融合的数据集的70%作为训练集、30%作为测试集,然后使用神经网络模型对缺陷类型进行识别和分类,可以为构建好的特征向量赋予标签,标签选用one
‑
hot编码,第一种缺陷100、第二种缺陷为010、第三种缺陷为001,可以使用多层感知机神经网络,在训练好模型后并对焊接缺陷进行预测,特征值识别准确度高,为定位缺陷提供了有效的技术支持。
[0061]
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
