1.本发明涉及一种基于工业相机的视觉精确定位控制方法,属于工业相机的视觉定位技术领域。
背景技术:
2.工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。现有技术中,没有一种较好基于工业相机的视觉精确定位的控制方法,导致工业相机的视觉精确定位达不到较好控制使用效果,特别是达不到可检测检测像素级角点的使用效果,不能实现视觉定位精度的进一步提高。因此,迫切需要一种基于工业相机的视觉精确定位控制方法,以解决现有技术中存在的这一问题。
3.为了解决上述技术问题,特提出一种新的技术方案。
技术实现要素:
4.本发明的目的在于提供一种基于工业相机的视觉精确定位控制方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于工业相机的视觉精确定位控制方法,所述方法包含下述步骤:
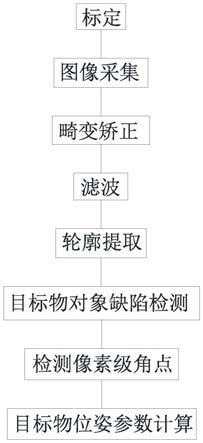
6.步骤一,标定:对拍照采集用到的工业相机进行标定,得到工业相机的内参数;
7.步骤二,图像采集:通过工业相机对待定位物件进行拍照;
8.步骤三,畸变矫正:对工业相机拍照的照片进行畸变矫正;
9.步骤四,滤波:对工业相机拍照的照片进行滤波处理,减小噪声对识别精度的影响;
10.步骤五,轮廓提取:利用亚像素边缘检测方法提取目标物的轮廓边沿;
11.步骤六,目标物对象缺陷检测:建立目标物对象特征库,将获得的轮廓边沿特征与目标物对象特征库进行对比检测;
12.步骤七,检测像素级角点:将目标物的图像送入至深度学习组件定位网络中,精确检测出组件的像素级角点;
13.步骤八,目标物位姿参数计算:对于缺陷检测合格的目标物对象,首先计算其目标物自身坐标系在图像坐标系中的坐标位置和夹角参数,然后进行坐标变换将目标物自身坐标系转换到世界坐标系中,从而得到目标物自身坐标系在世界坐标系中的位姿参数,并将目标物自身位姿参数发送给机器人,引导机器人进行轨迹计算。
14.优选地,所述图像采集过程中将彩塑图像转换为灰度图像。
15.优选地,所述工业相机上设置有闪光灯。
16.优选地,所述深度学习组件定位模块包括轻量型卷积神经网络模块、可变形卷积
神经网络模块、输出网络模块和角点解析模块;深度学习组件定位流程分为推理过程和训练过程两个流程;为了得到组件定位模块的网络模型参数需要使用样本集对网络进行闭环训练,样本集包含训练集、验证集和测试集。
17.与现有技术相比,本发明的有益效果是:没有一种较好基于工业相机的视觉精确定位的控制方法,实现工业相机的视觉精确定位达到较好控制使用效果,特别是不到可检测检测像素级角点的使用效果,实现视觉定位精度控制的进一步提高。
附图说明
18.图1为本发明的流程示意图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.请参阅说明书附图,本发明提供一种技术方案:一种基于工业相机的视觉精确定位控制方法,所述方法包含下述步骤:
21.步骤一,标定:对拍照采集用到的工业相机进行标定,得到工业相机的内参数;
22.步骤二,图像采集:通过工业相机对待定位物件进行拍照;
23.步骤三,畸变矫正:对工业相机拍照的照片进行畸变矫正;
24.步骤四,滤波:对工业相机拍照的照片进行滤波处理,减小噪声对识别精度的影响;
25.步骤五,轮廓提取:利用亚像素边缘检测方法提取目标物的轮廓边沿;
26.步骤六,目标物对象缺陷检测:建立目标物对象特征库,将获得的轮廓边沿特征与目标物对象特征库进行对比检测;
27.步骤七,检测像素级角点:将目标物的图像送入至深度学习组件定位网络中,精确检测出组件的像素级角点;
28.步骤八,目标物位姿参数计算:对于缺陷检测合格的目标物对象,首先计算其目标物自身坐标系在图像坐标系中的坐标位置和夹角参数,然后进行坐标变换将目标物自身坐标系转换到世界坐标系中,从而得到目标物自身坐标系在世界坐标系中的位姿参数,并将目标物自身位姿参数发送给机器人,引导机器人进行轨迹计算。
29.优选地,所述图像采集过程中将彩塑图像转换为灰度图像。
30.优选地,所述工业相机上设置有闪光灯。
31.优选地,所述深度学习组件定位模块包括轻量型卷积神经网络模块、可变形卷积神经网络模块、输出网络模块和角点解析模块;深度学习组件定位流程分为推理过程和训练过程两个流程;为了得到组件定位模块的网络模型参数需要使用样本集对网络进行闭环训练,样本集包含训练集、验证集和测试集。
32.在使用的时候,本发明提供一种较好基于工业相机的视觉精确定位的控制方法,实现工业相机的视觉精确定位达到较好控制使用效果,特别是不到可检测检测像素级角点
的使用效果,实现视觉定位精度控制的进一步提高。
33.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种基于工业相机的视觉精确定位控制方法,其特征在于,所述方法包含下述步骤:步骤一,标定:对拍照采集用到的工业相机进行标定,得到工业相机的内参数;步骤二,图像采集:通过工业相机对待定位物件进行拍照;步骤三,畸变矫正:对工业相机拍照的照片进行畸变矫正;步骤四,滤波:对工业相机拍照的照片进行滤波处理,减小噪声对识别精度的影响;步骤五,轮廓提取:利用亚像素边缘检测方法提取目标物的轮廓边沿;步骤六,目标物对象缺陷检测:建立目标物对象特征库,将获得的轮廓边沿特征与目标物对象特征库进行对比检测;步骤七,检测像素级角点:将目标物的图像送入至深度学习组件定位网络中,精确检测出组件的像素级角点;步骤八,目标物位姿参数计算:对于缺陷检测合格的目标物对象,首先计算其目标物自身坐标系在图像坐标系中的坐标位置和夹角参数,然后进行坐标变换将目标物自身坐标系转换到世界坐标系中,从而得到目标物自身坐标系在世界坐标系中的位姿参数,并将目标物自身位姿参数发送给机器人,引导机器人进行轨迹计算。2.根据权利要求1所述的基于工业相机的视觉精确定位控制方法,其特征在于:所述图像采集过程中将彩塑图像转换为灰度图像。3.根据权利要求1所述的基于工业相机的视觉精确定位控制方法,其特征在于:所述工业相机上设置有闪光灯。4.根据权利要求1所述的基于工业相机的视觉精确定位控制方法,其特征在于:所述深度学习组件定位模块包括轻量型卷积神经网络模块、可变形卷积神经网络模块、输出网络模块和角点解析模块;深度学习组件定位流程分为推理过程和训练过程两个流程;为了得到组件定位模块的网络模型参数需要使用样本集对网络进行闭环训练,样本集包含训练集、验证集和测试集。
技术总结
本发明公开了一种基于工业相机的视觉精确定位控制方法,对拍照采集用到的工业相机进行标定,得到工业相机的内参数;通过工业相机对待定位物件进行拍照;对工业相机拍照的照片进行畸变矫正;对工业相机拍照的照片进行滤波处理,减小噪声对识别精度的影响;利用亚像素边缘检测方法提取目标物的轮廓边沿;建立目标物对象特征库,将获得的轮廓边沿特征与目标物对象特征库进行对比检测;将目标物的图像送入至深度学习组件定位网络中,精确检测出组件的像素级角点;进行目标物位姿参数计算。本发明提高一种较好基于工业相机的视觉精确定位的控制方法,实现工业相机的视觉精确定位达到较好控制使用效果。好控制使用效果。好控制使用效果。
技术研发人员:夏成能
受保护的技术使用者:深圳市拓普瑞思科技有限公司
技术研发日:2021.06.28
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
