20.t1=t221.其中,ea表示轴向拉伸刚度,ei表示弯曲刚度,gj表示扭转刚度,l表示梁的长度,γ为梁中性轴上的应变分量,d为刚度矩阵,ρ
i
表示桁架杆件密度,a表示桁架单元杆件横截面积,v
x,1
、v
y,1
、v
z,1
表示任意杆件端点出三个速度分量,为等效梁中性轴上任意一点的速度分量,g为质量矩阵;
22.提取以下参数:
23.l——等效梁的长度;
24.ρ——等效梁密度;
25.a——等效梁横截面积;
26.ei——弯曲刚度;
27.步骤2:建立刚柔耦合系统坐标系
28.建立轨道坐标系oxyz为惯性坐标系,oxyz为本体坐标系,θ为面内角,φ为面外角,γ为天线抛物柱面姿态角,p1表示梁发生变形时,任意一点在本体坐标系下的位置矢量,μ
p
为该点的振动位移;
29.步骤3:确定广义坐标和广义力
30.柔性体模态离散为
[0031][0032]
其中,q(t)=sin(ωt α),ω是系统耦合振动频率,是柔性梁刚柔耦合振动模态,α是振动角度;
[0033]
根据假设模态法求得各阶振型函数:
[0034][0035][0036]
cosβ
i
l coshβ
i
l 1=β
i
l(sinβ
i
l coshβ
i
l
‑
cosβ
i
l sinhβ
i
l)m
t
/ρ
f
l
[0037]
为的各阶模态,将模态函数截取至n
t
阶,为1*n
t
阶行向量振型函数,q
(t)
为n
t
*1的列向量;β
i
表示各阶振动角度,ρ
f
表示假设桁架密度,m
t
表示将模态函数截取至m
t
阶;
[0038]
广义模态坐标表示为:
[0039]
q(t)=[q1,q2,...q
n
]
t
[0040]
其中,q
i
表示横向振动的广义模态坐标的列向量;
[0041]
等效梁的横向振动可以分解为两个方向,即图中所示的y方向和z方向,则两个方向模态离散可以表示为:
[0042][0043][0044]
其中,表示y方向模态,表示z方向模态;
[0045]
广义力表示为:
[0046]
q=[q1,q2,q3,q4,q5]
t
[0047]
q1,q2,q3,q4,q5分别表示未知的广义力列向量;
[0048]
步骤4:基于拉格朗日原理进行系统动力学建模
[0049][0050][0051][0052]
k=f(θ,φ,γ,q(t))
[0053]
其中,η=[θ,φ,γ,q
(t)
]
t
,q为广义力,p为剩余表达式;
[0054]
步骤5:公式推导
[0055]
等效梁上任意一点位置在本体系下的坐标:
[0056]
p0=[x,0,0]
t
[0057]
系统变形位移的模态表示:
[0058]
μ
p
=[0,w
y
,w
z
]
t
[0059]
等效梁上任意一点的位移r表示为:
[0060]
r=s
t
(p0 μ
p
)
[0061]
其中,s为旋转矩阵;
[0062]
将振动进行模态离散:
[0063][0064][0065]
系统动能表示为:
[0066][0067]
其中,ρa为等效梁密度与横截面积的乘积,m1和m2分别为两侧卫星质量,v
l
和v
‑
l
分别为梁两侧末端速度;
[0068]
系统势能表示为:
[0069][0070]
将系统的动能和势能带入拉格朗日方程:
[0071][0072]
l=t
‑
u
[0073]
η=[θ,φ,β,q
y
,q
z
]
t
[0074]
q=[q1,q2,q3,q4,q5]
t
[0075]
得到动力学方程:
[0076]
有益效果
[0077]
本发明提出的一种包含天线抛物柱面反射器结构和大型空间桁架的等效模型,通过假设模态法进行连续位移模态离散,确定广义坐标和广义力,最后基于拉格朗日原理对系统进行建模。该建模方法的核心是在全面考虑桁架天线结构的基础上,基于拉格朗日原
理对刚柔耦合系统提出一种高精度建模方法。与现有技术相比,本发明具有以下有益效果:
[0078]
(1)本发明设计了一种包含天线抛物柱面结构的桁架等效模型,提高了桁架式天线模型的精确性,弥补了现有桁架建模方法的不足;
[0079]
(2)本发明所设计的高精度等效动力学建模方法,利用假设模态法模态离散,降低了空间大尺度柔性结构的自由度,提高了工作效率,基于拉格朗日原理建立的刚柔耦合系统动力学方程,直观清晰的表达了运动规律,便于后续控制器的设计。
附图说明
[0080]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0081]
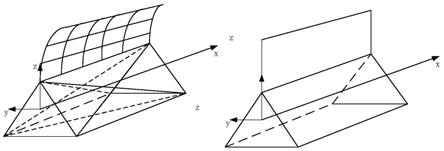
图1:等效梁模型示意图;
[0082]
图2:“天线
‑
卫星”系统坐标系示意图。
具体实施方式
[0083]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0084]
本发明所采用的技术方案包括以下步骤:
[0085]
步骤一:天线和桁架等效模型及参数提取
[0086]
步骤二:建立刚柔耦合系统坐标系
[0087]
步骤三:确定广义坐标和广义力
[0088]
步骤四:基于拉格朗日原理进行系统动力学建模
[0089]
步骤五:公式推导
[0090]
所述的步骤一中,天线和桁架等效结构如附图1所示,等效的具体步骤为:
[0091]
(1)分离桁架的周期单元;
[0092]
(2)周期单元应变能与连续梁应变能相等,得到等效刚度矩阵;
[0093]
(3)周期单元动能与连续梁动能相等,得到等效质量矩阵;
[0094]
桁架单元总应变能表示为:
[0095][0096]
其中,v、w、ψ分别对应杆件坐标系xyz中各方向位置;
[0097]
连续梁应变能表示为:
[0098][0099]
桁架单元总动能表示为:
[0100][0101]
连续梁总动能表示为:
[0102][0103]
基于能量等效原理:
[0104]
u1=u2[0105]
t1=t2[0106]
其中,ea表示轴向拉伸刚度,ei表示弯曲刚度,gj表示扭转刚度,l表示梁的长度,γ为梁中性轴上的应变分量,d为刚度矩阵,ρ
i
表示桁架杆件密度,a表示桁架单元杆件横截面积,v
x,1
、v
y,1
、v
z,1
表示任意杆件端点出三个速度分量,为等效梁中性轴上任意一点的速度分量,g为质量矩阵。
[0107]
将基于等效梁模型的计算结果与有限元软件的计算结果进行对比,验证等效梁的可靠性,进而证明等效梁模型刚度矩阵和质量矩阵的可靠性。
[0108]
提取以下参数:
[0109]
l——等效梁的长度;
[0110]
ρ——等效梁密度;
[0111]
a——等效梁横截面积;
[0112]
ei——弯曲刚度。
[0113]
所述的步骤二中,刚柔耦合系统坐标系建立如附图2:
[0114]
建立轨道坐标系oxyz为惯性坐标系,oxyz为本体坐标系,θ为面内角,φ为面外角,γ为天线抛物柱面姿态角,p1表示梁发生变形时,任意一点在本体坐标系下的位置矢量,μ
p
为该点的振动位移。
[0115]
所述的步骤三中,柔性体模态离散为
[0116][0117]
其中,q(t)=sin(ωt α),ω是系统耦合振动频率,是柔性梁刚柔耦合振动模态,α是振动角度;
[0118]
根据假设模态法求得各阶振型函数:
[0119][0120][0121]
cosβ
i
l coshβ
i
l 1=β
i
l(sinβ
i
l coshβ
i
l
‑
cosβ
i
l sinhβ
i
l)m
t
/ρ
f
l
[0122]
为的各阶模态,将模态函数截取至n
t
阶,为1*n
t
阶行向量振型函数,q
(t)
为n
t
*1的列向量。β
i
表示各阶振动角度,ρ
f
表示假设桁架密度,m
t
表示将模态函数截取至m
t
阶。
[0123]
广义模态坐标表示为:
[0124]
q(t)=[q1,q2,...q
n
]
t
[0125]
其中,q
i
表示横向振动的广义模态坐标的列向量。
[0126]
等效梁的横向振动可以分解为两个方向,即图中所示的y方向和z方向,则两个方向模态离散可以表示为:
[0127][0128][0129]
其中各变量计算方法与上述步骤相同。表示y方向模态,表示z方向模态。
[0130]
广义力表示为:
[0131]
q=[q1,q2,q3,q4,q5]
t
[0132]
q1,q2,q3,q4,q5分别表示未知的广义力列向量。
[0133]
所述的步骤四中,“天线
‑
卫星”系统中,卫星刚度远大于天线附件,将卫星视为刚体,根据天线低阶模态特性可将其视为等效梁,参数由步骤二得到,系统简化模型如附图2所示。
[0134]
系统动力学模型表示为:
[0135][0136][0137][0138]
k=f(θ,φ,γ,q(t))
[0139]
其中,η=[θ,φ,γ,q
(t)
]
t
,q为广义力,p为剩余表达式;
[0140]
所述的步骤5)中,公式推导如下:
[0141]
等效梁上任意一点位置在本体系下的坐标:
[0142]
p0=[x,0,0]
t
[0143]
系统变形位移的模态表示:
[0144]
μ
p
=[0,w
y
,w
z
]
t
[0145]
等效梁上任意一点的位移r表示为:
[0146]
r=s
t
(p0 μ
p
)
[0147]
其中,s为旋转矩阵。
[0148]
将振动进行模态离散:
[0149][0150][0151]
系统动能表示为:
[0152][0153]
其中,ρa为等效梁密度与横截面积的乘积,m1和m2分别为两侧卫星质量,v
l
和v
‑
l
分别为梁两侧末端速度。
[0154]
系统势能表示为:
[0155][0156]
将系统的动能和势能带入拉格朗日方程:
[0157][0158]
l=t
‑
u
[0159]
η=[θ,φ,γ,q
y
,q
z
]
t
[0160]
q=[q1,q2,q3,q4,q5]
t
[0161]
得到动力学方程:
[0162]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
