1.本发明涉及一种能够在非平衡小样本情况下诊断五相异步电动机滚动轴承故障的方法,属诊断技术领域。
背景技术:
2.因其高可靠性、容错运行等诸多优点,五相异步电动机已经应用于舰船、潜艇等特殊领域,滚动轴承则以压倒性优势应用于五相异步电动机。滚动轴承由外滚道、内滚道、保持架以及在它们之间转动的滚动体组成。在正常工作条件下,疲劳失效从微小裂纹开始,并逐渐扩展,继而引起材料碎片脱落,导致故障。因此,五相异步电动机滚动轴承的故障诊断具有重要意义。
3.就目前而言,振动信号频谱分析是最为准确、可靠的五相异步电动机滚动轴承故障诊断方法。该方法采集滚动轴承的时域振动信号并变换至频域,进而将频域振动信号与滚动轴承所固有的频域振动特性对比,以判断滚动轴承故障发生与否及其类型(例如,保持架故障、内滚道故障、外滚道故障)。
4.自2000年以来,机器学习方法应运而生并迅速获得广泛应用,这为故障诊断开辟了新的思路。通常,基于机器学习的轴承故障诊断方法可以分为三个步骤:首先,对信号预处理以凸显故障特征;其次,选择合适的模型进行训练与优化;最后,对实际采集到的数据进行故障诊断。
5.常用的机器学习算法有支持向量机(support vector machine,svm)、随机森林(random forest,rf)等,这些机器学习算法非线性较弱而难以提取深层特征,且严重依赖于预处理算法的特征凸显效果,因此对于复杂的分类问题往往无能为力。而五相异步电动机滚动轴承故障包括保持架故障、内滚道故障、外滚道故障及其交织等复杂情况,恰恰就是复杂的分类问题。因此,对于五相异步电动机滚动轴承故障诊断而言,上述常用的机器学习算法并不适用,或者,无法取得理想的效果。
6.更加重要的是,由于对轴承故障无法生成高质量的模拟数据,而工程实际中轴承故障相对于正常状态是小概率事件,采集实际的轴承故障信号的机会并不充分,因此获得的轴承正常和故障样本通常不平衡、故障样本的总量偏少。而常用的机器学习算法不能很好地处理非平衡小样本的情况,自然也就不能理想地用于五相异步电动机滚动轴承的故障诊断。
技术实现要素:
7.为了克服上述现有技术的不足,本发明提供一种基于gasf(格拉米角场)单通道图数据增强和迁移训练残差网络的五相异步电动机滚动轴承故障诊断方法,该方法能够利用少量的振动信号而生成高质量且充分的样本,并使用迁移学习训练残差分类器网络实现非平衡小样本下的五相异步电动机滚动轴承故障诊断。
的反余弦函数值,其余类推),对该反余弦函数序列进行如下编码获得伪格拉姆矩阵:
[0021][0022]
其中,φ
i,j
=φ
i
φ
j
,g即可视作单通道图。对降维后长度为256点的11676个样本,使用上述格拉米角场算法进行编码,获得11676个长宽均为256的单通道图。
[0023]
h.本发明选择带有梯度惩罚的基于wasserstein(瓦瑟斯坦)距离的wgan
‑
gp(生成对抗网络)作为生成模型。构造四个wgan
‑
gp网络,分别对应四种不同的训练样本。使用标签为0的样本训练对应的生成对抗网络,每10个循环观察生成器的样本质量,在训练500个循环后模型收敛,观察到生成样本质量已满足需要。对于标签1、2、3对应的样本与生成对抗网络,依次按上述流程进行训练。在训练完成后就获得了分别对应0、1、2、3四种状态的格拉米角场单通道图的生成器。使用这四个生成器对滚动轴承的0、1、2、3四种状态的每一种状态均生成3万个样本,总计12万个生成样本,并作为预训练集。
[0024]
wasserstein距离又称为earth
‑
mover距离(推土机距离),用于衡量两个概率分布之间的距离,当两个概率分布的支撑集没有重叠或者重叠非常少时,仍然能反映两个分布的远近。对抗生成网络模型就是使生成器的概率分布尽可能接近实际样本的概率分布,所以基于该距离的对抗生成网络更容易训练且生成样本的模式丰富,而加入梯度惩罚项有利于加速训练。
[0025]
i.构造残差分类网络。使用tensorflow2中在公共人脸数据集imagenet上预训练完成的由微软研究院提出的50层残差网络resnet50v2的卷积层作为特征提取层,之后依次连接二维全局池化层、全连接层、输出全连接层(均由tensorflow2提供),构成适用于滚动轴承故障分类的残差分类网络。这里,tensorflow2是一个由谷歌开源的深度学习框架。
[0026]
i.对于残差分类网络进行预训练。首先冻结特征提取层参数,使用步骤h中生成的样本进行预训练,在达到精度指标(本发明中选取85%的测试准确率作为该指标)后即可结束预训练。
[0027]
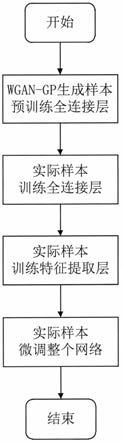
k.对预训练完成的网络,使用实际训练集,按照以下步骤进行训练:1)冻结特征提取层参数,训练全连接层;2)冻结全连接层,训练卷积特征提取层;3)对整个网络进行最终微调。在训练过程中,当网络准确度提升较小时(5个训练循环后“分类准确率”这一训练指标的提升均低于0.01%)即可认为网络收敛。本发明引入early
‑
stopping机制监控网络的收敛情况,该机制由tensorflow2框架提供,可以在网络训练过程中监控到训练指标(本发明选择“分类准确率”)提升较小的情况而判断网络收敛并提前结束训练。
[0028]
l.使用tensorflow2框架的save方法将网络模型保存为h5格式(由tensorflow2框架提供)的文件(包含网络结构与权重参数),需要时直接加载该文件、调用即可(使用tensorflow2框架提供的tensorflow.keras.models.load_model函数)。
[0029]
m.使用测试集评价训练完成的残差分类网络。
[0030]
n.将实际五相异步电动机滚动轴承的振动信号经过步骤c的滤波、步骤d的截取、步骤f的分段近似聚合与步骤g的gasf编码后输入到已经训练完成的模型中(加载步骤l中的h5格式的文件)即可进行故障诊断。
[0031]
本发明最显著的优点就是:通过使用gasf算法对时序信号进行编码,保留了信号时域特征,提高了卷积神经网络的分类性能。并且,使用wgan
‑
gp网络生成gasf样本图,充分扩充了训练样本,改善了非平衡数据下分类网络的性能。在训练上,采用预训练的残差网络作为分类网络的特征提取层,利用分层训练微调的方法进行训练,在保证分类准确率的前提下大幅地降低了训练的时间代价,在测试集上获得了高准确率。本发明基于残差分类网络的诊断模型可以封装、保存,在实际使用时仅需对其进行调用即可,符合工程实际的实时性要求。
附图说明
[0032]
图1是gasf算法流程图;
[0033]
图2是wgan
‑
gp结构简图;
[0034]
图3是wgan
‑
gp网络结构图;
[0035]
图4是残差分类网络结构图,其中:网络输出为1
×
4矩阵,[1 0 0 0]对应样本类别0,[0 1 0 0]对应样本类别1,[0 0 1 0]对应样本类别2,[0 0 0 1]对应样本类别3;
[0036]
图5是残差分类网络训练流程图;
[0037]
图6是四类故障实际样本的gasf图;
[0038]
图7是样本0对应的wgan
‑
gp训练过程生成器与评分器的损失;
[0039]
图8是wgan
‑
gp训练过程生成的样本。
[0040]
图文中所用各符号的意义:paa、分段近似聚合算法;gasf、格拉米角场;gram、格拉姆;wasserstein、瓦瑟斯坦;resnet50v2、由微软研究院提出的50层残差网络;wgan
‑
gp、生成对抗网络。
具体实施方式
[0041]
下面结合附图对本发明做进一步说明:
[0042]
将6206型滚动轴承安装于五相异步电动机上,且在轴承承载位置安装振动加速度传感器而采集振动信号。预先使用线切割机分别在轴承内滚道、外滚道、保持架切割出宽度1毫米的凹槽模拟故障轴承。设置正常状态对应标签0,内滚道故障状态对应标签1,外滚道故障状态对应标签2,保持架故障状态对应标签3。
[0043]
启动五相异步电动机后,针对正常状态,分别在满载、半载、空载状况下,各采集数据20000组、三种负载状况共有数据60000组;针对保持架故障状态,分别在满载、半载、空载状况下,各采集数据973组、三种负载状况共有数据2919组;对于内滚道故障状态、外滚道故障状态如上各测取数据2919组。每组数据的采样时长为40s、采样频率25khz。
[0044]
对采集到的非平衡数据集,使用python的imbalanced
‑
learn库中的randomundersampler函数对采集到的包含四种状态的数据集进行随机下采样,获得正常样本2919组、保持架故障样本2919组、内滚道故障样本2919组、外滚道故障样本2919组,总计11676组样本。
[0045]
对所有的11676组振动数据,逐组使用低通巴特沃斯滤波器进行滤波,滤波器阶数为8,截止频率接近采样频率的一半为12khz。
[0046]
对于滤波后的每一组振动数据,采用1024点滑动窗方法计算振动瞬时信号v
s
的有
效值v
s
,通过分析有效值的变化趋势,提取其最平稳亦即波动最小的4096点数据作为1个数据片段,总计获得11676个数据片段,并以之作为样本。
[0047]
将这11676个样本的70%作为训练集、30%作为测试集,测试集与训练集内不同类别的样本数量大致均衡。
[0048]
对每一样本,按图1所示gasf算法流程图进行处理。首先使用paa算法进行数据降维,将4096长度的时间序列降维为256长度的序列。对256长度的序列使用gasf进行编码获得长宽均为256的单通道图,此时获得11676个大小为256
×
256的单通道图。至此,样本的预处理完成。图6是四类故障实际样本的gasf示例图。
[0049]
按图2、图3所示wgan
‑
gp算法及结构图,基于tensorflow2,构造wgan
‑
gp模型。梯度惩罚项设置为10,批大小设置为8。设计wgan
‑
gp网络生成器接受1
×
100大小的随机高斯噪声作为输入,向后连接8个反卷积层,参数如表1所示。
[0050]
表1 wgan
‑
gp网络生成器参数
[0051][0052]
设计评分器接受256
×
256的单通道图片作为输入,向后连接5个卷积层、一个二维全局平均池化层、一个展平层以及一个输出全连接层,卷积层参数如表2所示:
[0053]
表2 wgan
‑
gp网络评分器参数
[0054][0055]
其中,relu与leakyrelu都是常用的神经网络激活函数,均由tensorflow2框架提供,relu称为修正线性单元,leakyrelu是relu的特殊版本。填充方式same与valid亦由tensorflow2的二维卷积函数实现并提供。
[0056]
使用nvidia公司的型号为rtx
‑
3090的图形计算卡对wgan
‑
gp网络进行训练,图7是样本0对应的wgan
‑
gp训练过程中生成器与评分器的损失曲线。使用训练好的四个wgan
‑
gp模型,生成每个类别3万个样本、总计12万个样本,构成预训练集。图8是wgan
‑
gp训练过程中,不同循环次数时生成的样例。
[0057]
残差分类网络结构如图4所示。输入层接受256
×
256
×
3的三通道图,所以将gasf单通道图在每个通道上复制构成三通道图。使用在imagenet上预训练的resnet50v2模型的
卷积层作为本残差分类网络的特征提取层,上层依次连接二维全局池化层、全连接层、输出层构成分类网络。按图5所示流程进行网络训练,使用tensorflow2框架提供的adam优化器进行优化并引入early
‑
stopping机制在网络学习速度降低到判断阀值(本发明选择5个训练循环后分类准确率提升均低于0.01%作为判断阀值)时提前结束训练——首先,使用wgan
‑
gp网络生成的12万个样本,冻结残差分类网络的特征提取层进行训练,学习率设为0.01并训练5个循环,训练后在测试集上评估模型准确率约93%;之后,使用实际样本构成的训练集,仅对全连接层进行训练,学习率设为0.005并训练16个循环,训练后在测试集上评估模型准确率约95%;再冻结全连接层,在实际样本的训练集上仅仅对特征提取层进行训练,学习率设制为0.001且训练10个循环,训练后在测试集上评估模型准确率约98%;最后仍然在实际样本构成的训练集上,对整个分类网络进行微调,学习率设制为0.001且训练5个循环。对经过上述步骤分层迁移训练的残差分类网络进行评估,分类准确率达到99.4%,参见表3。
[0058]
表3残差分类网络测试集评估
[0059][0060]
将训练好的残差分类模型使用保存tensorflow2框架的save方法保存为h5格式(由tensorflow2框架提供)的文件,需要调用时直接加载该文件即可。
[0061]
为了测试本发明方法的实际效果,针对正常状态(标签0)、内滚道故障状态(标签1)、外滚道故障状态(标签2)、保持架故障状态(标签3),另行测取了40组数据(每种状态10组,负载状况随机设置为空载或半载或满载)。使用本发明方法对上述40组数据进行“盲测”,结果如表4所示。由表4可以看出,本发明方法具有高准确度。
[0062]
表4残差分类网络“盲测”评估
[0063]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
