1.本发明应用于纯电动汽车技术领域,基于地图信息和迭代svr模型的纯电动汽车剩余续驶里程估算方法,特别针对行驶工况未知导致续驶里程预测精度难以提高的现状。
背景技术:
2.随着环境污染的加剧,纯电动汽车以其节能环保的优势,得到了国家的大力支持,并通过推出补贴、税收减免等政策提高消费者对电动汽车的购买力。然而由于电池技术的限制,电池能量密度低等问题尚未得到有效解决,导致纯电动汽车的电池容量不能达到传统汽车的续航水平。同时由于受到路况和环境的影响,纯电动汽车的实际续驶里程往往与bms给出的续驶里程存在差异,导致驾驶员产生“里程焦虑”的现象。所以需要结合实际对汽车的续驶里程进行精准的估算,不仅消除了驾驶员的顾虑,而且对推动纯电动汽车普及和发展发挥了重要作用。
3.续驶里程分为两类:标定续驶里程及剩余续驶里程。标定续驶里程是指在一定循环工况下电动汽车所能行驶的最长距离。剩余续驶里程则是指实际运行过程,车辆在电池不满电的状态下运行至电池截止电压过程中,车辆能够行驶的最大距离。
4.由于不同行驶工况和不同温度下,电动汽车消耗的能量不同,因此不同工况和不同温度下汽车的续驶里程也存在差异。本文提出了基于地图信息和迭代svr模型的续驶里程估算方法,该方法通过收集地图信息来预测未知行驶工况,然后采用迭代svr模型对续驶里程进行精准的计算,该方法提高了预测的精准度。
技术实现要素:
5.本文提出了一种基于地图信息和迭代svr模型的续驶里程估算方法,具体步骤如下:
6.1.分析影响纯电动汽车续驶里程的因素,包括纯电动汽车自身因素和外部环境因素。
7.1)基于车辆运动的物理力学模型,汽车行驶单位里程ds所需机械能de的计算公式为:
[0008][0009]
式中,ds的单位为km;de的单位为kwh;m为车辆总质量,单位kg;m
f
为滚动惯量的等效质量,单位kg;g为重力加速度,单位m/s2;f为车辆量滚动系数;为路面倾斜角,单位度(
°
);ρ为空气密度,单位kg/m3;c
x
为车辆阻力系数;a为车辆迎风面积,单位m2;v为车辆行驶速度,单位km/h;v
w
为风速,其方向定义为与车速相反,单位km/h。从公式可以看出,车辆的自身参数如车辆总质量、车辆迎风面积都会影响汽车单位里程能耗。一般情况下,汽车在行驶过程中需要克服的阻力来自四个部分,即滚动阻力、加速阻力、坡道阻力和空气阻力,除空气阻力以外均与汽车总质量,因此汽车总质量对能耗的影响最为明显,进而影响汽车的
续驶里程。
[0010]
2)汽车自身因素外,许多外部因素也会对汽车能耗产生影响,如行驶加速度、行驶的平稳性、环境的温度等,总体上可以将外部因素概括为车辆行驶工况和温度。
[0011]
不同行驶工况下,汽车的续驶里程会有所差异。将不同的工况下汽车的续驶里程进行对比,如图1,其中con_60为车速60英里每小时的匀速工况;con_45为车速45英里每小时的匀速工况;wvycity工况是城市拥堵工况;eudc工况是郊区行驶工况;ece工况是市区行驶工况;nedc则是由4个ece工况和1个eudc工况组成,可视为混合工况。
[0012]
温度也会明显影响汽车的续驶里程,主要体现在对电池性能的影响,低温环境下,能量释放率降低,同一辆车在相同工况不同温度下的续驶里程对比,如图2,随着温度降低,电动汽车续驶里程会下降。
[0013]
2.对汽车行驶工况原始数据进行片段划分,采用定步长划分法,以步长120秒对数据划分若干个片段,如图3,通过速度曲线,提取工况片段的特征参数,包括平均速度最大行驶速度v
max
、怠速时间比p
d
、速度标准差v
std
、soc值和电池温度。
[0014]
3.对行驶工况片段进行分类,采用快速搜索和发现密度峰值聚类算法(cbfsafodp),将工况片段分为四类,如图4这四种聚类类别可以与汽车实际行驶过程中的4种典型工况相对应,c1为城市拥堵工况,怠速时间长,车速低;c2为城市低速工况,怠速时间中等,车速较低;c3为郊区/城市畅通工况,怠速时间短,车速较高;c4为高速工况,怠速时间极短,车速高。
[0015]
4.构建行驶单位里程soc下降值的估算模型,汽车单位里程soc的变化量与行驶工况、当前电池soc值和电池温度有关。基于svr模型,以单位里程soc变化量(δsoc)为目标输出,以工况类别、电池组温度和当前电池soc作为输入。模型的估算结果如图5,模型误差见图6,此模型精度满足在续驶里程预测中对单位里程soc下降值进行估算的需求。
[0016]
5.结合地图信息,对未知行驶工况进行预测。通过百度地图api获得道路类型共10种,将差异不大的道路类型进行归纳,简化为四个类别:高速、一级道路、二级道路和其他道路。路况信息分为五个类别:无路况、畅通、缓行、拥堵和十分拥堵,分别用0-4编号表示。依据道路类型和路况指数确定对应工况类型。汽车实际行驶过程中,通过百度地图api的路径规划功能,获取道路类型和路况信息,实现对未来行驶工况的预测,这对提高续驶里程的预测精度有重要意义。
[0017]
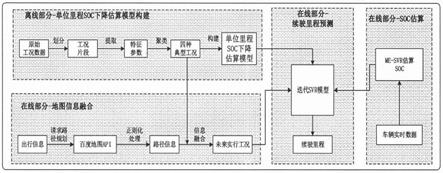
6.构建迭代svr续驶里程预测模型,流程图见图7,整体框图见图8。
[0018]
1)采集电池当前soc值与电池温度,通过百度地图路径规划功能与地图信息,预测未知行驶工况类型。利用单位里程soc下降值模型,将电池当前soc值、电池温度及工况类型作为输入,预测未来行驶一公里soc的变化量δsoc。
[0019]
2)依据soc=soc-δsoc,计算电池剩余soc值。
[0020]
3)循环步骤1和步骤2直至电池剩余的soc等于0或者小于设定值。由于循环一次,行驶一公里,因此循环总次数r即为电动汽车的续驶里程。
[0021]
4)当循环r次就满足规划路径的剩余里程,而电池soc值仍未达到0或者设定最小值,于是采用简单的svr模型对剩余续驶里程进行估计,使用当前电池soc值、上一路段平均工况参数与温度作为输入,粗略估计汽车的剩余续驶里程r
′
,最后的续驶里程为r=r r
′
。
附图说明
[0022]
图1不同工况下的电动汽车续驶里程
[0023]
图2不同环境温度下的续驶里程
[0024]
图3片段划分示例
[0025]
图4工况片段聚类结果
[0026]
图5模型估算效果
[0027]
图6模型误差
[0028]
图7迭代svr模型流程图
[0029]
图8基于地图信息和迭代svr模型的续驶里程预测方法的整体流程图
[0030]
图9汽车行驶路线
[0031]
图10车辆行驶速度曲线
[0032]
图11续驶里程预测结果和预测精度
[0033]
应用实例
[0034]
结合advisor软件和实际车辆行驶数据设计仿真实验,以某运输企业的车辆行驶数据为基础,提取实际行驶的速度,将此速度载入到advisor中,使仿真电动汽车按照此速度运行,用以模拟在实际情况下的行驶过程。
[0035]
为了评估模型在不同行程下的预测精度,需要定义一个标准化的指标,简单的使用实际行驶距离减去续驶里程变化并不能准确地反映里程长短不同时的预测精度,因此定义模型精度计算公式如下:
[0036][0037]
式中a是预测精度,distance为实际行驶距离,range_use为剩余续驶里程的变化(第一次预测结果与当前预测结果的差值)。a越接近0则预测精度越高,且a大于0时,表示算法给出的剩余续驶里程比较保守,反之,如果a小于0,则说明给出的续驶里程偏高。
[0038]
此外为衡量多次测试的结果的平均精度,定义预测精度的绝对平均值e,如式(5-2)所示:
[0039][0040]
式中,a
i
为第i次测试的预测精度,n为测试的总次数,e越小表示模型的预测精度越高。
[0041]
从数据抽取的一段行程为例,该段行程的起点是江西省吉安市井冈山市,终点是江西省南昌市西湖区沿江大道,该行程的车辆行驶路线如图9,速度曲线如图10。将此行程的速度加载到advisor中,使用设置好的ev1型电动车按照此速度完成这段里程,并在仿真过程中对续驶里程进行预测。结果显示该段行程共计322.16km,在仿真中剩余续驶里程由517km下降为189km,续驶里程变化328km,预测精度为-0.0186,如图11。
[0042]
通过结果可以看出,基于地图信息和迭代svr模型的纯电动汽车续驶里程预测方法满足精度要求,能够准确估计纯电动汽车续驶里程。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
