1.本实用新型涉及机器视觉识别领域,尤其涉及一种基于机器视觉的辨物寻物小车。
背景技术:
2.随着科技的进步与生产力的提高,为了适应物品快速生产及运送的需求,越来越多的生产车间及物流仓库走向自动化,加入了多种机器人协同或全自动工作,同时军事上也开始由哨兵侦查向机器人或无人机自动侦查发展,而为了解放人们的劳动力,做家务的机器人也开始发展。在国内机器视觉应用广泛,基于机器视觉的辨物寻物小车的出现能够很好的代替繁琐的人工分类,但现有的技术仍存在投放不准确的现象,使用范围不广,而且基于机器视觉的辨物寻物机器成本仍较高不便于推广。
技术实现要素:
3.本实用新型的目的在于解决现有技术中存在的技术问题,提供一种基于机器视觉的辨物寻物小车。
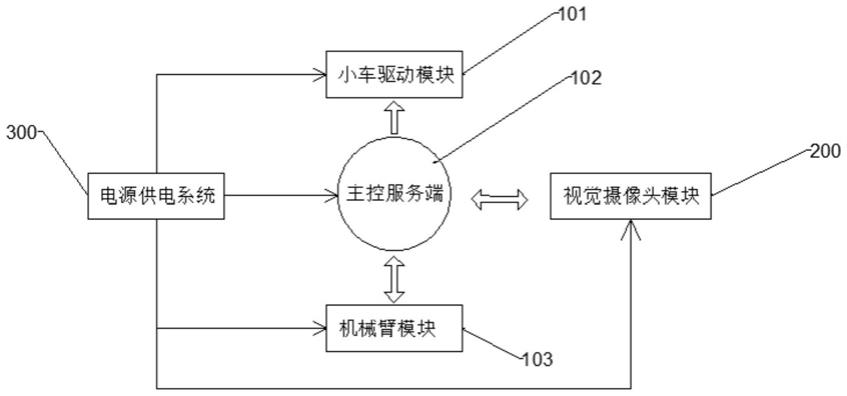
4.为实现上述目的,本实用新型提供的技术方案是:一种基于机器视觉的辨物寻物小车,包括主控服务端、小车驱动模块、视觉摄像头模块、机械臂模块以及电源供电系统,所述小车驱动模块、机械臂模块和视觉摄像头模块均与所述主控服务端双向连接,所述主控服务端、小车驱动模块、视觉摄像头模块和机械臂模块均与所述电源供电系统连接,所述视觉摄像头模块包括摄像头和树莓派,所述摄像头与所述树莓派连接,所述树莓派与所述主控服务端连接,所述机械臂模块包括圆筒式夹取臂,雷达测距模块和压力传感器,所述雷达测距模块、压力传感器与所述主控服务端连接,所述主控服务端与所述圆筒式夹取臂连接。
5.优选的,所述主控服务端由具备io控制功能的单片机组成,能够运行事先烧录好的驱动小车搜寻物体和控制机械臂模块的功能程序。
6.优选的,所述小车驱动模块为后轮驱动前轮的转向机构,所述转向机构包括电机、舵机和铝合金材质的底板,所述舵机设置在所述底板靠近前轮一侧,所述电机设置在所述底板靠近后轮一侧。
7.优选的,所述电源供电系统包括变压器和电池。
8.本实用新型有益效果:
9.1.本实用新型在智能小车的基础上加载了搬运与智能识别功能,可以准确高效地实现无人化物体自动拾捡分类并投放到指定投放点,可以大大缩减现今传统的人工分类过程中的人工成本,提高分类的准确率。
10.2.本实用新型中小车成本低,能够更易于这一小车的推广使用。
11.3.本实用新型能够快速识别物体及其分类,效率高,使用范围广,能够推广到多个领域。
附图说明
12.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
13.图1是本实用新型优选实施例整体框架示意图;
14.图2是本实用新型优选实施例视觉摄像头模块的工作流程图;
15.图3是本实用新型优选实施例机械臂夹取模块的工作流程图。
16.附图标注:
17.101
‑
小车驱动模块102
‑
主控服务端103
‑
机械臂模块104
‑
压力传感器105
‑
雷达测距模块106
‑
圆筒式夹取臂200
‑
视觉摄像头模块201
‑
摄像头202
‑
树莓派300
‑
电源供电系统。
具体实施方式
18.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
19.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
20.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
21.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
22.参照图1
‑
图3,本实用新型的优选实施例,一种基于机器视觉的辨物寻物小车,包括主控服务端102、小车驱动模块101、视觉摄像头模块200、机械臂模块103以及电源供电系统300,所述小车驱动模块101、机械臂模块103和视觉摄像头模块200均与所述主控服务端102双向连接,所述机器的视觉摄像头模块200将捕获的图像进行处理后将位置信息通过主控服务端102,再由主控服务端102控制小车驱动模块101移动到相应的位置;所述主控服务端102、小车驱动模块101、视觉摄像头模块200和机械臂模块103均与所述电源供电系统300连接,所述视觉摄像头模块200包括摄像头201和树莓派202,所述摄像头201与所述树莓派202连接,所述摄像头201的型号为ov7670,所述树莓派202与所述主控服务端102连接,具体的,型号为ov7670的摄像头201捕获图像,树莓派202作为图像处理器的机器的视觉摄像头模块200,与树莓派202中预录入的图像进行对比,当对比出图像中有与预录入的图片一致的物体或场地时,将该图像进行智能计算,得出该物体或放置处的位置信息,再将处理好的位置信息传至主控服务端102;所述机械臂模块103包括圆筒式夹取臂106,雷达测距模块
105和压力传感器104,所述雷达测距模块105、压力传感器104与所述主控服务端102连接,所述主控服务端102与所述圆筒式夹取臂106连接,所述雷达测距模块105在小车运行过程中实时测量与所识别物体的距离,并将该距离信息传入主控服务端102中,主控服务端102处理信息控制小车停止和机械臂的夹取;所述压力传感器104在机械臂夹取过程中检测机械臂是否夹取到物体,将信息传入主控服务端102,主控服务端102处理信息控制机械臂的夹取。
23.本实用新型在智能小车的基础上加载了搬运与智能识别功能,可以准确高效地实现无人化物体自动拾捡分类并投放到指定投放点,可以大大缩减现今传统的人工分类过程中的人工成本,提高分类的准确率;而且小车成本低,能够更易于这一小车的推广使用;另外能够快速识别物体及其分类,效率高,使用范围广,能够推广到多个领域;优选的,能够应用于垃圾分类举措,实现垃圾分类自动化,有效的替代了传统的人工垃圾分类,对推进实行全国垃圾分类这一举措有极大的推进作用。
24.作为本实用新型的优选实施例,其还可具有以下附加技术特征:
25.本实施例中,所述主控服务端102由具备io控制功能的单片机组成,所述单片机型号优选为stm32zet6,能够运行事先烧录好的驱动小车搜寻物体和控制机械臂模块103的功能程序。
26.本实施例中,所述小车驱动模块101为后轮驱动前轮的转向机构,所述转向机构包括电机、舵机和铝合金材质的底板,所述舵机设置在所述底板靠近前轮一侧,所述电机设置在所述底板靠近后轮一侧,所述舵机通过连动杆与前轮连接,所述电机为后轮提供动力,所述电机型号为mg513p30,额定电压为12v,所述舵机型号为hwz020,所述小车驱动模块101能根据主控服务端102发出的主控信号驱动小车移动到指定的位置,能够实现无人化物体自动投放到指定投放点。
27.本实施例中,所述电源供电系统300包括变压器和电池,所述变压器能将电池的电压稳衡至本实用新型个模块的额定输出电压,以提供各个模块正常的工作电压,使得本实用新型的工作状态更加稳定。
28.本实用新型工作流程:
29.视觉摄像头模块200中的摄像头201捕获图像,树莓派202作为图像处理器的机器的视觉摄像头模块200,与树莓派202中预录入的图像进行对比,当对比出图像中有与预录入的图片一致的物体或场地时,将该图像进行智能计算,得出该物体或放置处的位置信息,再将处理好的位置信息传至主控服务端102;主控服务端102根据位置信息控制小车驱动模块101将小车移动到指定的位置;雷达测距模块105实时测量小车与物体之间的距离,并将该距离信息传入主控服务端102中,当距离合适时控制小车驱动模块101将小车停止;主控服务端102并向机械臂模块103下达指令夹取物体,压力传感器104根据压力判断是否夹取到物体,并将该信息传入主控服务端102。
30.若未夹取到则调整夹取位置进行再夹取,夹取物体之后摄像头201再捕获图像并将图像传入树莓派202中,搜寻识别场地,当搜寻到时计算场地的位置信息,并将该位置信息传入主控服务端102中;再根据位置信息控制小车驱动模块101将小车移动到指定的位置;当到达指定的位置的时候,控制机械臂模块103将物体放下,即完成一次操作。
31.在不出现冲突的前提下,本领域技术人员可以将上述附加技术特征自由组合以及
叠加使用。
32.以上所述仅为本实用新型的优先实施方式,只要以基本相同手段实现本实用新型目的的技术方案都属于本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

