1.本发明涉及一种高精度固定时间收敛的相对姿态容错跟踪控制方法,属于航天器控制技术领域。
背景技术:
2.日益复杂的交会对接任务,往往要求追踪航天器与目标航天器之间的相对姿态跟踪控制系统具有高精度的控制性能,但由于空间环境恶劣,对在轨航天器来说,尤其是长期在高低温、强辐射、强电磁干扰的太空环境中工作时,不可避免会出现各类故障。轻微的故障可能导致交会对接任务控制精度的降低,严重的故障会影响整个控制系统的稳定性和可靠性,甚至导致整个任务失败。从任务安全的角度看,为执行交会对接操作任务设计能对执行机构故障的容错控制方案势在必行。与此同时航天器在轨任务受到各种空间环境干扰力矩的影响及存在系统不确定性,要实现高精度和可靠性控制,这就要求控制系统具备较强的鲁棒性和适应性。传统交会对接容错控制方法大多数仅能保证相对姿态跟踪控制系统的渐进稳定性,即理论上需无限长时间才能完成相对姿态跟踪控制操作,保证相对姿态收敛于平衡点附近。无限长的收敛时间将限制这些方法在姿态需快速机动控制的任务中的应用。
技术实现要素:
3.本发明解决的技术问题是:针对目前现有技术中,航天器难以于在轨任务中实现高精度、可靠性控制的问题,提出了一种以实现交会对接任务中追踪航天器与目标航天器间相对姿态跟踪控制为总体目标,充分考虑交会对接任务中面临的模型不确定性、外界环境干扰、高精度控制和快速机动以及执行机构故障等实际问题的高精度固定时间收敛的相对姿态容错跟踪控制试验方法。
4.本发明解决上述技术问题是通过如下技术方案予以实现的:
5.一种高精度固定时间收敛的相对姿态容错跟踪控制方法,步骤如下:
6.(1)考虑执行机构存在故障的情况,建立轨道器与上升器相对姿态跟踪控制运动学与动力学模型;
7.(2)根据交会对接任务中相对姿态跟踪控制误差的暂态、稳态性能指标要求,设计相对姿态跟踪误差性能函数、相对姿态跟踪误差固定时间收敛性能函数;
8.(3)根据步骤(2)所得相对姿态跟踪误差性能函数构造转换误差变量,并根据转换误差变量构造中间误差变量;
9.(4)根据步骤(1)构建的相对姿态跟踪控制运动学与动力学模型、步骤(4)所得中间误差变量构造相对姿态虚拟控制量;
10.(5)根据步骤(4)所得相对姿态虚拟控制量,计算相对轨道与姿态虚拟控制量的导数,并根据步骤(1)构建的相对姿态跟踪控制运动学与动力学模型、步骤(4)所得中间误差变量设计固定时间收敛的相对姿态容错跟踪控制器,同时构建自适应律估计外界环境干
扰、执行机构故障情况。
11.步骤(1)中,轨道器与上升器相对姿态跟踪控制运动学与动力学模型具体为:
[0012][0013][0014]
式中,为用修正罗德里格斯参数描述的姿态跟踪误差,为姿态跟踪误差,为轨道器转动惯量矩阵,与分别表示干扰力矩与控制力矩;
[0015]
相对姿态动力学模型中矩阵g(σ
e
)、c
a
和非线性向量h
a
分别为:
[0016][0017]
c
a
=s(j(ω
e
r(σ
e
)ω
t
))
‑
s(r(σ
e
)ω
t
)j
‑
js(r(σ
e
)ω
t
)
[0018][0019]
式中,i3为单位矩阵,分别表示轨道器与上升器的角速度,满足ω
e
=ω
s
‑
r(σ
e
)ω
t
,s(
·
)为叉乘算子;
[0020]
轨道器本体系与上升器本体系之间的坐标转换矩阵r(σ
e
)为
[0021][0022]
对于任意三维向量γ=[γ
1 γ
2 γ3]
t
,叉乘矩阵s(γ)具体为:
[0023][0024]
控制力矩具体为:
[0025][0026]
式中,τ
c
为相对姿态跟踪控制系统待设计控制指令力矩,为姿控系统执行机构故障引起的输出力矩误差,即加性失效故障;对角矩阵e
σ
=diag{e
σ1
,e
σ2
,e
σ3
}为姿控系统执行机构的控制效率矩阵,即乘性失效故障,e
σ0
为其标称值,矩阵e
σ
对角元素满足0<e
σi
≤1(i=1,2,3),其中,若e
σ0
为单位阵,则表示姿控系统执行机构不存在故障。
[0027]
步骤(2)中,相对姿态跟踪误差性能函数如下:
[0028][0029]
式中,ρ
σi∞
为相对轨姿态跟踪误差稳态精度指标,p
σ
与q
σ
为满足p
σ
<q
σ
的正奇数,α
σ
>0,β
σ
>0,α
σ
和β
σ
影响相对姿态跟踪误差的收敛速度;
[0030]
相对姿态跟踪误差收敛至期望稳态指标的时间t
σ
的计算方法为:
[0031]
[0032]
根据时间t
σ
获取的相对姿态跟踪误差固定时间收敛性能函数及相对姿态跟踪误差的预设性能要求具体为:
[0033][0034]
ρ
σli
≤σ
ei
≤ρ
σui
(i=1,2,3)。
[0035]
步骤(3)中,转换误差变量χ
σ
=[χ
σ1
,χ
σ2
,χ
σ3
]
t
具体为:
[0036][0037]
式中,δ
ui
与δ
li
分别为性能边界约束系数,根据转换误差变量χ
σ
设计中间误差变量e
σ1
,e
σ2
,具体为:
[0038][0039][0040][0041]
式中,ξ
σ1
与ξ
σ2
为引入的辅助变量,k
σ1
与k
σ2
均为正常数,矩阵r
σ
具体为:
[0042][0043]
式中,滤波跟踪误差ζ
σ
满足ζ
σ
=α
σd
‑
α
σc
,α
σc
为待设计的相对姿态跟踪系统虚拟控制输入,α
σd
为下面滤波器输出,具体为:
[0044][0045]
式中,γ
σ
>0为滤波器参数。
[0046]
步骤(4)中,相对姿态虚拟控制量具体为:
[0047]
α
σc
=
‑
(r
σ
g(σ
e
))
‑1k
σ1
χ
σ
‑
g
‑1(σ
e
)υ
σ
。
[0048]
式中,辅助变量υ
σ
=[υ
σ1
,υ
σ2
,υ
σ3
]
t
具体为:
[0049][0050]
步骤(5)中,所述自适应律具体为:
[0051][0052]
式中,λ
σ1
,λ
σ2
与均为正常数;
[0053]
固定时间相对姿态容错跟踪控制器具体为:
[0054][0055]
式中,k
σ2
为正常数。
[0056]
本发明与现有技术相比的优点在于:
[0057]
本发明提供的一种高精度固定时间收敛的相对姿态容错跟踪控制试验方法,针对空间交会对接任务的特殊性,首先通过设计一种能固定时间收敛的相对姿态跟踪误差性能约束边界,结合预设性能控制方法来保证相对姿态跟踪误差的在固定时间内收敛到稳态指标约束范围内,此外通过自适应控制技术对系统不确定性、外界干扰、执行机构故障等复合不确定性进行估计并补偿,能够在固定时间内保证闭环控制系统的稳定性,实现对故障的容错控制的同时,亦能实现对外部干扰抑制控制以及对模型不确定性的鲁棒控制,既增强了控制系统对执行机构故障的鲁棒容错能力,同时加快了相对姿态跟踪误差的收敛时间。
附图说明
[0058]
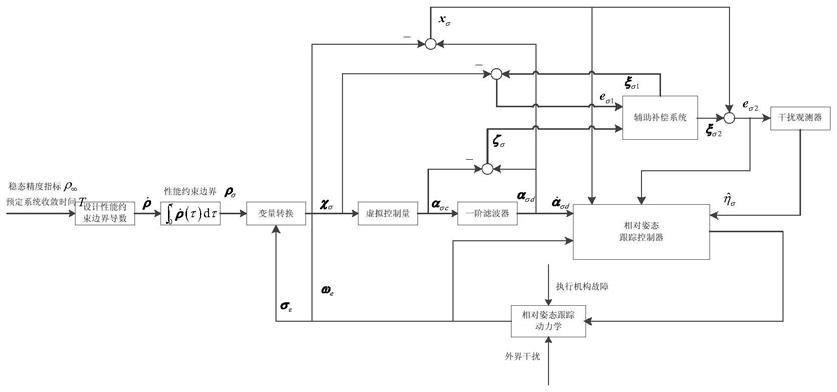
图1为发明提供的相对姿态跟踪控制系统闭环结构框图;
[0059]
图2为发明提供的考虑执行机构故障的固定时间相对姿态跟踪控制方法流程框图;
[0060]
图3为发明提供的相对姿态跟踪误差x轴分量;
[0061]
图4为发明提供的相对姿态跟踪误差y轴分量;
[0062]
图5为发明提供的相对姿态跟踪误差y轴分量;
具体实施方式
[0063]
一种高精度固定时间收敛的相对姿态容错跟踪控制方法,通过自适应控制技术,能够对系统不确定性、外界干扰、执行机构故障等复合不确定性进行了有效估计与补偿,利用一种能固定时间收敛的相对姿态跟踪误差性能约束边界,结合预设性能控制方法保证了相对姿态跟踪误差的在固定时间内收敛到稳态指标约束范围内,既增强了控制系统对执行机构故障的鲁棒容错能力,同时加快了相对姿态跟踪误差的收敛时间,具体步骤如下:
[0064]
(1)考虑执行机构存在故障的情况,建立轨道器与上升器相对姿态跟踪控制运动学与动力学模型;
[0065]
其中,轨道器与上升器相对姿态跟踪控制运动学与动力学模型具体为:
[0066][0067][0068]
式中,为用修正罗德里格斯参数描述的姿态跟踪误差,为姿态跟踪误差,为轨道器转动惯量矩阵,与分别表示干扰力矩与控制力矩;
[0069]
相对姿态动力学模型中矩阵g(σ
e
)、c
a
和非线性向量h
a
分别为:
[0070][0071]
c
a
=s(j(ω
e
r(σ
e
)ω
t
))
‑
s(r(σ
e
)ω
t
)j
‑
js(r(σ
e
)ω
t
)
[0072][0073]
式中,i3为单位矩阵,分别表示轨道器与上升器的角速度,满足ω
e
=ω
s
‑
r(σ
e
)ω
t
,s(
·
)为叉乘算子;
[0074]
轨道器本体系与上升器本体系之间的坐标转换矩阵r(σ
e
)可表示为
[0075][0076]
对于任意三维向量γ=[γ
1 γ
2 γ3]
t
,叉乘矩阵s(γ)具体为:
[0077][0078]
控制力矩具体为:
[0079][0080]
式中,τ
c
为相对姿态跟踪控制系统待设计控制指令力矩,为姿控系统执行机构故障引起的输出力矩误差,即加性失效故障;对角矩阵e
σ
=diag{e
σ1
,e
σ2
,e
σ3
}为姿控系统执行机构的控制效率矩阵,即乘性失效故障,e
σ0
为其标称值,矩阵e
σ
对角元素满足0<e
σi
≤1(i=1,2,3),其中,若e
σ0
为单位阵,则表示姿控系统执行机构不存在故障;
[0081]
(2)根据交会对接任务中相对姿态跟踪控制误差的暂态、稳态性能指标要求,设计相对姿态跟踪误差性能函数、相对姿态跟踪误差固定时间收敛性能函数;
[0082]
其中,相对姿态跟踪误差性能函数如下:
[0083][0084]
式中,ρ
σi∞
为相对轨姿态跟踪误差稳态精度指标,p
σ
与q
σ
为满足p
σ
<q
σ
的正奇数,α
σ
>0,β
σ
>0,α
σ
和β
σ
影响相对姿态跟踪误差的收敛速度;
[0085]
相对姿态跟踪误差收敛至期望稳态指标的时间t
σ
的计算方法为:
[0086][0087]
根据时间t
σ
获取的相对姿态跟踪误差固定时间收敛性能函数及相对姿态跟踪误差的预设性能要求具体为:
[0088][0089]
ρ
σli
≤σ
ei
≤ρ
σui
(i=1,2,3)
[0090]
(3)根据步骤(2)所得相对姿态跟踪误差性能函数构造转换误差变量,并根据转换误差变量构造中间误差变量;
[0091]
其中,转换误差变量χ
σ
=[χ
σ1
,χ
σ2
,χ
σ3
]
t
具体为:
[0092][0093]
式中,δ
ui
与δ
li
分别为性能边界约束系数,根据转换误差变量设计中间误差变量,具体为:
[0094][0095][0096][0097]
式中,ξ
σ1
与ξ
σ2
为引入的辅助变量,k
σ1
与k
σ2
均为正常数,矩阵r
σ
具体为:
[0098][0099]
式中,滤波跟踪误差ζ
σ
满足ζ
σ
=α
σd
‑
α
σc
,α
σc
为待设计的相对姿态跟踪系统虚拟控制输入,α
σd
为下面滤波器输出,具体为:
[0100][0101]
式中,γ
σ
>0为滤波器参数;
[0102]
(4)根据步骤(1)构建的相对姿态跟踪控制运动学与动力学模型、步骤(4)所得中间误差变量构造相对姿态虚拟控制量;
[0103]
其中,相对姿态虚拟控制量具体为:
[0104]
α
σc
=
‑
(r
σ
g(σ
e
))
‑1k
σ1
χ
σ
‑
g
‑1(σ
e
)υ
σ
[0105]
式中,辅助变量υ
σ
=[υ
σ1
,υ
σ2
,υ
σ3
]
t
具体为:
[0106][0107]
(5)根据步骤(4)所得相对姿态虚拟控制量,计算相对轨道与姿态虚拟控制量的导数,并根据步骤(1)构建的相对姿态跟踪控制运动学与动力学模型、步骤(4)所得中间误差变量设计固定时间收敛的相对姿态容错跟踪控制器,同时构建自适应律估计包含外界复杂环境干扰、执行机构故障等在内的复合不确定性。
[0108]
具体的,自适应律具体为:
[0109][0110]
式中,λ
σ1
,λ
σ2
与均为正常数;
[0111]
固定时间相对姿态容错跟踪控制器具体为:
[0112][0113]
式中,k
σ2
为正常数。
[0114]
下面结合具体实施例进行进一步说明:
[0115]
本发明方法首先建立交会对接任务中轨道器与上升器间的相对姿态跟踪动力学与运动学模型,考虑了模型不确定性、执行机构故障和外界干扰力矩扰动。然后,设计具有固定时间收敛特性的性能边界来约束相对姿态跟踪误差。最后,设计自适应更新律来估计包含模型不确定性、执行机构故障和外界干扰力矩扰动在内的复合不确定性,并由此得到最终的轨道器与上升器间的相对姿态跟踪控制律。
[0116]
在本实施例中,如图1、图2所示,针对交会对接任务中跟踪航天器与目标航天器间的相对姿态跟踪控制问题提出了一种固定时间相对姿态容错跟踪控制方法,具体步骤为:
[0117]
(1)在考虑执行机构故障的情况下,建立轨道器与上升器间相对姿态跟踪控制运动学与动力学。
[0118][0119][0120]
式中,为用修正罗德里格斯参数描述的姿态跟踪误差,为姿态跟踪误差,为轨道器转动惯量矩阵,与分别表示干扰力矩与控制力矩。相对姿态动力学模型中矩阵g(σ
e
)、c
a
和非线性向量h
a
分别表示为
[0121][0122]
c
a
=s(j(ω
e
r(σ
e
)ω
t
))
‑
s(r(σ
e
)ω
t
)j
‑
js(r(σ
e
)ω
t
)
[0123][0124]
式中,i3为单位矩阵,分别表示轨道器与上升器的角速度,满足ω
e
=ω
s
‑
r(σ
e
)ω
t
,s(
·
)为叉乘算子,定义:对于任意三维向量γ=[γ
1 γ
2 γ3]
t
,叉乘矩阵s(γ)为
[0125][0126]
轨道器本体系与上升器本体系之间的坐标转换矩阵r(σ
e
)可表示为
[0127][0128]
由于实际执行机构可能存在故障情况,导致控制力矩满足
[0129]
[0130]
式中,τ
c
为相对姿态跟踪控制系统待设计控制指令力矩,为姿控系统执行机构故障引起的输出力矩误差,即为加性失效故障;对角矩阵e
σ
=diag{e
σ1
,e
σ2
,e
σ3
}为姿控系统执行机构的控制效率矩阵,即为乘性失效故障,e
σ0
为其标称值,矩阵e
σ
对角元素满足0<e
σi
≤1(i=1,2,3)。如果e
σ0
为单位阵,则表示姿控系统执行机构不存在故障。
[0131]
(2)根据相对姿态跟踪控制误差的暂态和稳态性能指标要求,设计相对姿态跟踪误差固定时间收敛性能函数导数为
[0132][0133]
式中,ρ
σi∞
表示相对轨姿态跟踪误差稳态精度指标,p
σ
与q
σ
为满足p
σ
<q
σ
的正奇数,α
σ
>0,β
σ
>0,并且α
σ
和β
σ
会影响相对姿态跟踪误差的收敛速度。相对姿态跟踪误差将在时间t
σ
内收敛到期望稳态指标,其中t
σ
为
[0134][0135]
(3)构造相对姿态跟踪误差固定时间收敛性能函数为
[0136][0137]
那么相对姿态跟踪误差的预设性能要求可以分别表示为
[0138]
ρ
σli
≤σ
ei
≤ρ
σui
(i=1,2,3)
[0139]
(4)构造相对姿态跟踪控制器设计的转换误差变量为
[0140][0141]
式中,δ
ui
与δ
li
分别为性能边界约束系数,一般取1。
[0142]
(5)构造用于后续相对姿态跟踪控制器设计的中间误差变量
[0143][0144]
式中,辅助变量ξ
σ1
与ξ
σ2
分别为下面辅助补偿系统的状态变量。
[0145][0146][0147]
式中,k
σ1
与k
σ2
均为正常数,矩阵r
σ
为
[0148][0149]
式中,滤波跟踪误差ζ
σ
满足ζ
σ
=α
σd
‑
α
σc
,α
σc
为待设计的相对姿态跟踪系统虚
[0150]
拟控制输入,α
σd
为下面滤波器输出
[0151][0152]
式中,γ
σ
>0为滤波器参数。
[0153]
(6)基于步骤(1)中相对姿态转换误差变量,设计相对姿态虚拟控制量为
[0154]
α
σc
=
‑
(r
σ
g(σ
e
))
‑1k
σ1
χ
σ
‑
g
‑1(σ
e
)υ
σ
[0155]
式中,辅助变量υ
σ
=[υ
σ1
,υ
σ2
,υ
σ3
]
t
具体为:
[0156][0157]
(7)利用步骤(5)的中间误差变量,设计自适应律估计系统不确定性、外界干扰、执行机构故障等复合项上界。
[0158][0159]
式中,λ
σ1
,λ
σ2
与均为正常数;
[0160]
(8)基于步骤(1)的相对姿态跟踪运动学、步骤(5)中相对姿态中间误差变量、步骤(7)中复合不确定项上界估计值设计相对姿态跟踪控制量;
[0161][0162]
式中,k
σ2
为正常数。
[0163]
如图3、图4、图5所示,给出本发明仿真实例,图3
‑
5给出了跟踪航天器与目标航天器间相对姿态跟踪误差随时间变化曲线。从图3
‑
5可以看出,相对姿态跟踪误差均能在较短的时间内收敛到平衡点附近,而且整个暂态过程中,相对姿态跟踪误差均位于由相对姿态跟踪性能指标要求所确定的性能边界约束范围内。
[0164]
综上,本发明设计的高精度固定时间收敛的相对姿态容错跟踪控制试验方法,首先,通过自适应控制技术对系统不确定性、外界干扰、执行机构故障等复合不确定性进行了有效估计与补偿;此外,通过设计一种能固定时间收敛的相对姿态跟踪误差性能约束边界,结合预设性能控制方法保证了相对姿态跟踪误差的在固定时间内收敛到稳态指标约束范围内。总之,该方法既增强了控制系统对执行机构故障的鲁棒容错能力,同时加快了相对姿态跟踪误差的收敛时间。
[0165]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

