1.本发明涉及无人机应用领域,特别是一种基于无人机系统的抢险救灾的方法及其无人机系统。
背景技术:
2.随着无人机的不断发展,无人机的运用领域越发的广泛,其中作为灾前预防和灾后救援工具都具有重要意义,无人机不仅动作迅速,而且保证了救援工作的安全,能为合理分配救援力量、确定救灾重点区域、选择安全救援路线以及灾后重建提供有价值的参考,但是还缺乏系统的管理方法。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种基于无人机系统的抢险救灾的方法及其无人机系统,大大提高搜救效率。
4.技术方案:为实现上述目的,本发明的一种基于无人机系统的抢险救灾的方法及其无人机系统,包括以下步骤:
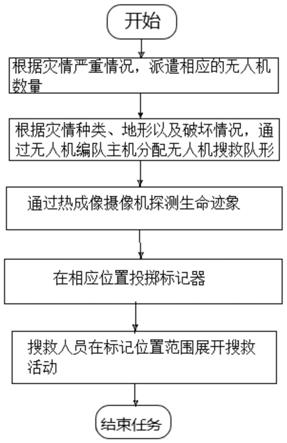
5.第一步骤,根据灾情严重情况,派遣相应的无人机数量;
6.第二步骤,根据灾情种类、地形以及破坏情况,通过无人机编队主机分配无人机搜救范围;
7.第三步骤,通过热成像摄像机探测生命迹象,并在相应位置投掷标记器;
8.第四步骤,搜救人员在标记位置范围展开搜救活动。
9.进一步地,山体滑坡泥石流抢险救灾的方法包括以下步骤:
10.第一步骤,通过巡飞无人机探查灾情,通过摄像机记录泥石流滑坡距离、覆盖面积以及轮廓形状;
11.第二步骤,根据记录的数据,通过计算机系统计算分析泥石流的流动状态,包括流向以及流速;
12.第三步骤,无人机编队主机根据分析数据,规划搜寻路线以及无人机分布位置;
13.所述无人机编队由滑坡处出发,以一字型方阵沿泥石流流向方向飞行,如果遇到泥层较厚的泥堆,所述无人机改变方阵,以倒扣型碗状方阵罩住所述泥堆进行探测。
14.第四步骤,探查到生命迹象,投掷标记器。
15.进一步地,洪水抢险救灾的方法包括以下步骤:
16.第一步骤,无人机方阵沿洪水湍流方向飞行,通过摄像机探测生命迹象;
17.第二步骤,探测到生命迹象,投掷标记器;如果幸存者周围环境相对安全,通过无人机扫描周围地形以及环境,监测是否有二次灾害的可能,没有则投掷标记器等待救援对的救援,若存在二次灾害可能,则暂留一架无人机对周围进行监视,并通过通讯通知附近搜救队进行优先救援;
18.如果探测到处于湍流中的幸存者,则无人机立刻启动跟踪系统,跟随目标,通过摄
像机记录幸存者状态,并反馈给附近的搜救队,所述无人机在路径上以一定距离投掷多个标记器,引导搜救队寻找目标幸存者。
19.进一步地,地震灾后抢险救灾的方法包括以下步骤:
20.第一步骤,无人机编队巡飞于房区上空,通过摄像机探测废墟中的生命迹象;
21.第二步骤,在生命迹象点投掷标记器,搜救队在标记范围内展开搜救活动;
22.所述无人机编队通过扫描废墟地形,与废墟表面保持一定的高度,无人机在一定范围内均匀分布,在所述一定范围内,整个无人机编队形成地毯式无人机方阵;
23.对于未完全倒塌的高层建筑的探查,所述无人机编队在竖直方向上形成多组包围式无人机方阵,各组包围式无人机方阵可通过扫描建筑倾斜角度来改变该包围式无人机方阵的整体偏移角度,若在高层建筑内探测到生命迹象,则发射标记器吸附于高层建筑对应位置的外墙上。
24.进一步地,包括无人机本体和设置于无人机本体的机腹的蜂窝标记装置;所述无人机本体的机腹还设置有摄像机;所述蜂窝标记装置包括一块蜂窝板、若干承托机构和若干标记器;所述蜂窝板的蜂窝孔为通孔结构,所述蜂窝板顶面贴合无人机本体的机腹封堵所述蜂窝孔的上端口;所述标记器、承托机构、蜂窝孔三者一一对应,所述标记器设置于蜂窝孔内,所述承托机构设置于蜂窝板底面,所述承托机构承托所述标记器,且标记器可通过承托机构释放。
25.进一步地,所述蜂窝板侧面设置有连接板,所述连接板通过六角头螺栓紧固在无人机本体的机身侧面。
26.进一步地,所述标记器包括铅坠、导气软管、气囊、氢气瓶、电动阀、电源和控制器;所述铅坠为内部具有腔室的槽体结构,所述铅坠顶部具有封盖,所述封盖上贯穿固设有外螺纹连接管口,所述气囊通过导气软管连通所述外螺纹连接管口的外端;所述氢气瓶设置于铅坠内,所述氢气瓶的瓶口通过电动阀对接有出气管,所述出气管连通外螺纹连接管口的内端;所述电源和控制器均设置于铅坠内,所述电源用于向控制器及电动阀供电,所述电动阀通过所述控制器控制,所述控制器与无人机本体的飞行控制系统信号传输连接,所述无人机本体的飞行控制系统与地面控制中心信号传输连接。
27.进一步地,所述导气软管的长度大于等于米。
28.进一步地,所述封盖通过内六角螺栓紧固在铅坠上,所述导气软管的进气端设置有内螺纹金属接头,所述内螺纹金属接头与外螺纹连接管口的外端螺纹旋接。
29.进一步地,所述承托机构包括竖向伺服电机以及通过横向曲杆连接于竖向伺服电机的转轴上的竖向顶杆;所述竖向伺服电机的用电通过无人机本体的蓄电池提供,且竖向伺服电机受无人机本体的飞行控制系统控制;所述竖向顶杆支撑所述铅坠底部。
30.有益效果:本发明的一种基于无人机系统的抢险救灾的方法及其无人机系统,能够应对泥石流,洪水以及地震等多种自然灾害的灾后抢险救灾活动,通过无人机从空中探测生命迹象,并通过投掷标记器让搜救对更容易发现搜救目标,大大提高了搜救效率。
附图说明
31.附图1为一种基于系统的抢险救灾的方法框图;
32.附图2为无人机的结构图;
33.附图3为蜂窝标记装置的结构图;
34.附图4为标记器的结构图。
具体实施方式
35.下面结合附图对本发明作更进一步的说明。
36.如附图1
‑
4所述的一种基于无人机系统的抢险救灾的方法及其无人机系统,包括以下步骤:
37.第一步骤,根据灾情严重情况,派遣相应的无人机数量;
38.第二步骤,根据灾情种类、地形以及破坏情况,通过无人机编队主机分配无人机搜救范围;
39.第三步骤,通过热成像摄像机探测生命迹象,并在相应位置投掷标记器(23);
40.第四步骤,搜救人员在标记位置范围展开搜救活动。
41.山体滑坡泥石流抢险救灾的方法包括以下步骤:
42.第一步骤,通过巡飞无人机探查灾情,通过摄像机记录泥石流滑坡距离、覆盖面积以及轮廓形状;
43.第二步骤,根据记录的数据,通过计算机系统计算分析泥石流的流动状态,包括流向以及流速;
44.第三步骤,无人机编队主机根据分析数据,规划搜寻路线以及无人机分布位置;
45.所述无人机编队由滑坡处出发,以一字型方阵沿泥石流流向方向飞行,如果遇到泥层较厚的泥堆,所述无人机改变方阵,以倒扣型碗状方阵罩住所述泥堆进行探测。
46.第四步骤,探查到生命迹象,投掷标记器(23)。
47.洪水抢险救灾的方法包括以下步骤:
48.第一步骤,无人机方阵沿洪水湍流方向飞行,通过摄像机探测生命迹象;
49.第二步骤,探测到生命迹象,投掷标记器(23);如果幸存者周围环境相对安全,通过无人机扫描周围地形以及环境,监测是否有二次灾害的可能,没有则投掷标记器等待救援对的救援,若存在二次灾害可能,则暂留一架无人机对周围进行监视,并通过通讯通知附近搜救队进行优先救援;
50.如果探测到处于湍流中的幸存者,则无人机立刻启动跟踪系统,跟随目标,通过摄像机记录幸存者状态,并反馈给附近的搜救队,所述无人机在路径上以一定距离投掷多个标记器(23),引导搜救队寻找目标幸存者。
51.地震灾后抢险救灾的方法包括以下步骤:
52.第一步骤,无人机编队巡飞于房区上空,通过摄像机探测废墟中的生命迹象;
53.第二步骤,在生命迹象点投掷标记器(23),搜救队在标记范围内展开搜救活动;
54.所述无人机编队通过扫描废墟地形,与废墟表面保持一定的高度,无人机在一定范围内均匀分布,在所述一定范围内,整个无人机编队形成地毯式无人机方阵;
55.对于未完全倒塌的高层建筑的探查,所述无人机编队在竖直方向上形成多组包围式无人机方阵,各组包围式无人机方阵可通过扫描建筑倾斜角度来改变该包围式无人机方阵的整体偏移角度,若在高层建筑内探测到生命迹象,则发射标记器(23)吸附于高层建筑对应位置的外墙上。
56.包括无人机本体1和设置于无人机本体1的机腹的蜂窝标记装置2;所述无人机本体1的机腹还设置有摄像机;所述蜂窝标记装置2包括一块蜂窝板21、若干承托机构22和若干标记器23;所述蜂窝板21的蜂窝孔210为通孔结构,所述蜂窝板21顶面贴合无人机本体1的机腹封堵所述蜂窝孔210的上端口;所述标记器23、承托机构22、蜂窝孔210三者一一对应,所述标记器23设置于蜂窝孔210内,所述承托机构22设置于蜂窝板21底面,所述承托机构22承托所述标记器23,且标记器23可通过承托机构22释放。摄像机进行地面视觉侦查,当探测到待搜救目标后,承托机构22释放标记器23下落至地面进行标记,从而对地面救援人员进行指导搜救,大大提高搜救效率。
57.所述蜂窝板21侧面设置有连接板3,所述连接板3通过六角头螺栓4紧固在无人机本体1的机身侧面,装配便捷。
58.所述标记器23包括铅坠231、导气软管232、气囊233、氢气瓶237、电动阀23.1、电源238和控制器239;所述铅坠231为内部具有腔室的槽体结构,所述铅坠231顶部具有封盖23.3,所述封盖23.3上贯穿固设有外螺纹连接管口235,所述气囊233通过导气软管232连通所述外螺纹连接管口235的外端;所述氢气瓶237设置于铅坠231内,所述氢气瓶237的瓶口通过电动阀23.1对接有出气管23.2,所述出气管23.2连通外螺纹连接管口235的内端;所述电源238和控制器239均设置于铅坠231内,所述电源238用于向控制器239及电动阀23.1供电,所述电动阀23.1通过所述控制器239控制,所述控制器239与无人机本体1的飞行控制系统信号传输连接,所述无人机本体1的飞行控制系统与地面控制中心信号传输连接;所述气囊233通过打开状态的电动阀23.1输入氢气胀大并漂浮于空中,地面上的搜救人员向空中寻找气囊233即可获取搜救目标,更容易被探测到。
59.在本方案中,作为优选,所述导气软管232的长度大于等于1.8米,便于搜救人员看到,为了更加醒目,气囊233可以染成黄色或橘黄色。
60.所述封盖23.3通过内六角螺栓234紧固在铅坠231上,所述导气软管232的进气端设置有内螺纹金属接头236,所述内螺纹金属接头236与外螺纹连接管口235的外端螺纹旋接,便于安装,同时为了避免漏气,可在内螺纹金属接头236内加入橡胶密封垫。
61.所述承托机构22包括竖向伺服电机221以及通过横向曲杆222连接于竖向伺服电机221的转轴上的竖向顶杆223;所述竖向伺服电机221的用电通过无人机本体1的蓄电池提供,且竖向伺服电机221受无人机本体1的飞行控制系统控制;所述竖向顶杆223支撑所述铅坠231底部。当通过竖向伺服电机221带动竖向顶杆223转动移开铅坠231以外,即释放整个标记器23。
62.以上描述是本发明的优选实施例,对于本领域普通技术人员而言,不脱离本发明的方法步骤还可以做出若干改进和调整,这些改进和调整还视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

