1.本发明涉及智能体运输技术领域,特别涉及一种智能实验室的管理系统。
背景技术:
2.智能体是无人驾驶飞机的简称,除了军事上大量应用外,民用方面的应用就更广,主要有森林防火、边防的缉私、航空拍照、地面的勘探、电网巡逻、管道巡逻、交通管理、城市安防等。但在上述应用中,大部分是单台智能体应用为主,利用多台智能体绳索协同吊运,可以解决单台智能体运力不足的问题,因此,对其进行研究有较大的理论意义和实用价值。中国的此类研究相对较少,中国的赵志刚分析了2台无人直升机吊运系统运动学与稳定性,已初步探讨了紧耦合多机系统的特点。目前的实验室管理系统中,没有提前将实验器材准备好,需要耗费大量的人力物力,同时在实验器材的搬运过程中,容易造成实验器材的损坏。
技术实现要素:
3.本发明的主要目的是提供一种智能实验室的管理系统,旨在解决现有的目前的本发明技术方案旨在解决现有的智能实验室的管理系统无法提前摆放实验器材且无法确保实验器材安全的技术问题。
4.为实现上述目的,本发明提供的一种智能实验室的管理系统,包括:信息获取模块,用于获取预约实验所需要的器材,智能搬运装置,用于将器材从放置处取出,并将所述器材搬运至指定的试验台,智能搬运装置,用于将所述器材进行装配以满足实验需求,智能搬运装置包括:第一智能体和第二智能体,第一智能体和第二智能体协同运动用于将所述器材搬运至指定的试验台;所述第一智能体和第二智能体,第一智能体和第二智能体协同运动将所述器材搬运至指定的试验台包括:路线规划模块,用于规划第一智能体和第二智能体搬运器材的路线;轨迹处理模块,用于将所述第一智能体的第一轨迹航线离散为多个目标航迹点和第二智能体的第二轨迹航线离散为多个目标航迹点;执行模块,用于分别获取第一智能体和第二智能体第时刻的实际坐标值,控制第一智能体的实际坐标值和目标航迹点的坐标值之间的差值小于预设值,控制第二智能体的实际坐标值和目标航迹点的坐标值之间的差值小于预设值;所述第一智能体和所述第二智能体还包括:第一连杆和第二连杆以及第三连杆,第一智能体与第一连杆连接,第二智能体与第三连杆连接,所述第一连杆,第二连杆和所述第三连杆依次连接,将第二连杆的旋转运动分解为水平面内的旋转与竖直面内的旋转两部分,转过的角度回转角与变幅角,若第一智能体的实际坐标值和目标航迹点的坐标值之间的差值小于预设值,并且第二智能体的实际坐标值和目标航迹点的坐标值之间的差值小于预设值,协同控制器、第一pid控制器以及第二pid控制器,用于控制回转角与变幅角小于预设变化角度。
5.优选地,协同控制器要求消耗功率最小以及实际升力和目标升力误差最小;每个
时间的推力分配即求解下列二次规划问题:,其中,w,q,ω是质量矩阵,u表示电机的升力,α表示回转角,δα表示回转角的变化量,s是松弛变量。
6.优选地,第一智能体和第二智能体的飞行速度小于预设速度值。
7.优选地,若第一智能体和第二智能体中,某一智能体的实际坐标值和目标航迹点坐标值之间的差值大于预设值,二次规划模块,分别重新规划第一智能体和第二智能体的多个目标航迹点。
8.本发明提前预约将指令发送至智能体,智能体将实验器材提前搬运至指定的地点,可以有效的提高了实验的自动化程度,另外,通过设置协同规划可以有效的提高智能体搬运的合理性。
附图说明
9.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
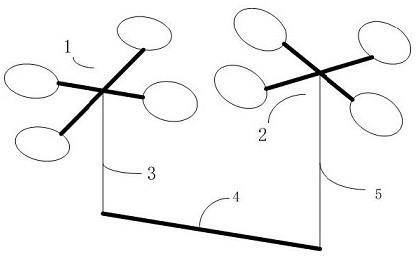
10.图1为本发明智能体系统的结构图。
11.图2为本发明第一智能体和第二智能体以及第二连杆的俯视示意图。
12.图3为智能体系统的控制结构图。
13.图4为第一智能体和第二智能体的离散航迹点集合图。
14.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
17.另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
18.本发明提供的一种智能实验室的管理系统,如图1
‑
4所示,包括:信息获取模块,用于获取预约实验所需要的器材,智能搬运装置,用于将器材从放置处取出,并将器材搬运至指定的试验台,智能搬运装置,用于将器材进行装配以满足实验需求,智能搬运装置包括:
第一智能体1和第二智能体2,第一智能体1和第二智能体2协同运动用于将器材搬运至指定的试验台;第一智能体1和第二智能体2,第一智能体1和第二智能体2协同运动将器材搬运至指定的试验台包括:路线规划模块,用于规划第一智能体1和第二智能体2搬运器材的路线;轨迹处理模块,用于将第一智能体1的第一轨迹航线离散为多个目标航迹点和第二智能体2的第二轨迹航线离散为多个目标航迹点;执行模块,用于分别获取第一智能体1和第二智能体2第时刻的实际坐标值,控制第一智能体1的实际坐标值和目标航迹点的坐标值之间的差值小于预设值,控制第二智能体2的实际坐标值和目标航迹点的坐标值之间的差值小于预设值;第一智能体1和所述第二智能体2还包括:第一连杆3和第二连杆4以及第三连杆5,第一智能体1与第一连杆3连接,第二智能体2与第三连杆5连接,第一连杆3,第二连杆4和第三连杆5依次连接,将第二连杆4的旋转运动分解为水平面内的旋转与竖直面内的旋转两部分,转过的角度回转角与变幅角,若第一智能体1的实际坐标值和目标航迹点的坐标值之间的差值小于预设值,并且第二智能体2的实际坐标值和目标航迹点的坐标值之间的差值小于预设值,协同控制器、第一pid控制器以及第二pid控制器,用于控制回转角与变幅角小于预设变化角度。
19.本发明提前预约将指令发送至智能体,智能体将实验器材提前搬运至指定的地点,可以有效的提高了实验的自动化程度,另外,通过设置协同规划可以有效的提高智能体搬运的合理性。
20.具体地,路线规划模块,用于根据运输起始点和目标航迹点,规划第一智能体1的第一轨迹航线和第二智能体2的第二航迹航迹线,轨迹处理模块,用于将所述第一智能体1的第一轨迹航线离散为多个目标航迹点(a1,a2,...,aθ,...,an)和第二智能体2的第二轨迹航线离散为多个目标航迹点(b1,b2,...,bθ,...,bn),为某一时刻,的坐标为:,的坐标为:,将第二连杆4的旋转运动分解为水平面内的旋转与竖直面内的旋转两部分,转过的角度回转角与变幅角,根据几何关系易得:,,,,,若第一智能体1和第二智能体2的实际坐标值和目标航迹点坐标值之间的差值小于预设值,协同控制器、第一pid控制器以及第二pid控制器,用于控制回转角与变幅角小于预设变化角度。
21.本发明通过离散时间对第一智能体1的目标航迹点和第二智能体2的目标航迹点进行规划,然后在第一智能体1和第二智能体2的实际坐标值和目标航迹点的坐标值之间的差值小于预设误差范围时,将规划的目标航迹点作为协同控制器、第一pid控制器和第二pid控制的控制输入,而不是将实际的第一智能体1和第二智能体2的位置和姿态作为控制的输入,从而控制第二连杆4能够始终在一定的范围之内,既简化了控制算法,又能保证第
二连杆4的姿态,从而确保需要运输的器材能够稳定的到达目标。
22.优选地,设在第时刻,第一智能体1目标航迹点为:,第二智能体2目标航迹点为:,第一智能体1实际航迹点为:η1,第二智能体2实际航迹点为:η2;协同控制器,用于规划第一智能体1目标航迹点和实际航迹点之间的参考轨迹为:,协同控制器,用于规划第二智能体2目标航迹点和实际航迹点的参考轨迹为:,其中,,式中:是第一智能体1大地坐标系下的坐标误差,,式中:是第二智能体2大地坐标系下的坐标误差,是对角矩阵。引入新的变量s
1,
s2:。第一智能体1和第二智能体2的通讯网络拓扑采用有向图:;在本实施例中,将第二智能体2设置为领航者,对于第二智能体2,它至少有一条到第一智能体1的有向路径,则有向图g存在有向生成树;记有向图g的邻接矩阵为:,则一致性算法可以写作:。在第一智能体1目标航迹点和实际航迹点之间差值小于预设值,第二智能体2目标航迹点和实际航迹点之间差值小于预设值,其中预设值为可以设置为10cm或者其他数值,协同控制器为第一智能体1和第二智能体2分别规划的参考轨迹为:和,而在第一智能体1沿着参考轨迹飞行过程中,第二智能体2沿着参考轨迹过程中,基于一致性算法的协同控制器则能够使第一智能体1和第二智能体2相对位置的保持,第一pid控制器控制第一智能体1姿态稳定,第二pid控制器控制第二智能体2姿态稳定,从而可控制回转角θ与变幅角φ小于预设变化角度。更具体地,第一pid控制器和一致性算法的闭环动力学方程可以写为:;其中:,,,,k1是三阶正定对角阵,k是三阶正定对角阵,m1为第一智能体1的质量的惯性矩阵、c1( v1)为第一智能体1的的科里奥利向心力矩阵、d1(v1)为第一智能体1的的阻尼系数矩阵,为坐标转换矩阵。同理,第二pid控制器和一致性算法的闭环动力学方程和第一pid控制器和一致性算法的闭环动力学方程类似,在此不再赘述。
23.优选地,协同控制器要求消耗功率最小以及实际升力和目标升力误差最小;每个时间的推力分配即求解下列二次规划问题:。第一智能体1和第二智能体2的是四个电机进行动力分配,推力分配是将协同控制器计算得到的升力合理分配到各个电机,
,,式中:w,q,ω是质量矩阵,u表示电机的升力,u0表示电机的初始的升力,表示回转角,表示回转角的变化量,s是松弛变量,电机的构型矩阵,τ是协同控制器所需的推力,和分别是u和在每个时间的取值范围。
24.优选地,第一智能体1和第二智能体2的飞行速度小于预设速度值。
25.具体的说,第一智能体1和第二智能体2控制命令可以通过零阶控制器连接至电机,从而控制智能体飞行速度小于预设速度值,即相邻时刻,智能体需要飞行的距离也是固定的。如图4所示,智能体飞行的范围都是固定不变的,在一定的区间范围之内。
26.优选地,若第一智能体1和第二智能体2中,某一智能体的实际坐标值和目标航迹点坐标值之间的差值大于预设值,二次规划模块,分别重新规划第一智能体1和第二智能体2的多个目标航迹点。
27.具体的说,第k时刻,第一状态观测器观测第一智能体1的位姿和实际坐标值,第二状态观测器观测第二智能体2的位姿和实际坐标值,第一智能体1且/或第二智能体2的目标航迹点的坐标值与实际测量的坐标值大于预设值,二次规划模块,分别重新规划第一智能体1和第二智能体2的多个目标航迹点,第一智能体1和第二智能体2分别沿着新的目标航迹点飞行直至飞行至指定试验台。
28.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

