一种基于模糊pid的纺织整纬机运动控制系统
技术领域
1.本实用新型属于纺织设备技术领域,具体涉及一种基于模糊pid的纺织整纬机运动控制系统。
背景技术:
2.纺织整纬机是纺织机械中用于纠正纬线的机器,具体而言:在加工布料时,整纬机能够自动检测纬纱的倾斜角度及方向,有效纠正织物在生产过程中产生的纬斜、纬弧,提高织物质量。整纬机的运动控制技术是其核心技术。传统运动控制方法常采用pid控制算法,然而(1)随着整纬机结构系统复杂多变,在不同工况下具有不同的系统传递函数,所述不同工况指辊子的转速变化以及布料的宽度、软硬程度变化等不同工作状况;(2)整纬机的结构系统惯性较大,很难达到快速的响应。上述原因导致传统pid控制算法很难适应多工况、大惯性下的运动控制要求,仍然需要进一步改进。
技术实现要素:
3.本实用新型的目的在于提供一种基于模糊pid的纺织整纬机运动控制系统,解决现有技术中整纬机的传统运动控制方法很难适应多工况、大惯性下的运动控制要求的技术问题。
4.为了解决上述技术问题,本实用新型采用如下技术方案实现:
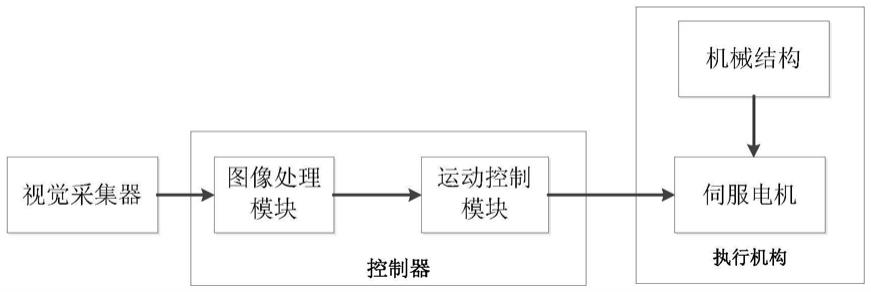
5.一种基于模糊pid的纺织整纬机运动控制系统,包括视觉采集器、控制器和执行机构;所述控制器包括图像处理模块和运动控制模块;执行机构包括伺服电机和通过伺服电机驱动的机械结构;所述视觉采集器和伺服电机均与控制器电连接。
6.所述视觉采集器实时采集整纬机输出端的布料图像,并将采集的布料图像发送给控制器的图像处理模块,图像处理模块对布料图像进行图像处理,得到布料的角度偏差信息作为运动控制对象,并传送给运动控制模块。所述运动控制模块器接收到角度偏差信息后,计算得到角度偏差的变化率,基于模糊pid控制算法对角度偏差及其变化率进行闭环反馈控制,计算得到伺服电机转动的方向、速度与位置信息。并通过内部集成的运动控制电路将计算得到的伺服电机转动的方向、速度与位置信息发送至伺服电机,伺服电机开始转动,并带动机械结构运动。本实用新型基于模糊pid控制技术,对纺织整纬机的驱动系统进行控制,进一步优化了整纬机在多工况、大惯性下的精确作业能力,稳定性更高。
7.进一步改进,所述视觉采集器为设置在整纬机输出端上方的摄像头。
8.进一步改进,所述执行机构的机械结构包括皮带减速传动机构、丝杠和通过螺纹连接套设在丝杠上的弯辊拨杆;皮带减速传动机构包括小带轮、大带轮和转动皮带;所述丝杠通过轴承与整纬机转动连接,伺服电机固定安装在控制箱中,其输出轴与小带轮固定连接,丝杠的一端大带轮固定连接,小带轮和大带轮通过传动皮带连接,丝杠上的执行部件为整纬机的弯辊拨杆。所述运动控制模块器接收到角度偏差信息后,通过内部集成的运动控制电路将计算得到的伺服电机转动的方向、速度与位置信息发送至伺服电机,伺服电机开
始转动,驱动丝杠转动,带动弯辊拨杆沿丝杠运动,进而控制布料的运动方向。
9.与现有技术相比,本实用新型的有益效果在于:
10.本实用新型基于模糊pid控制技术,对纺织整纬机的驱动系统进行控制,进一步优化了整纬机在多工况、大惯性下的精确作业能力,稳定性更高。
附图说明
11.图1为本实用新型所述基于模糊pid的纺织整纬机运动控制系统原理图。
具体实施方式
12.下面进一步描述本实用新型的技术方案,但要求保护的范围并不局限于所述。
13.如图1所示,一种基于模糊pid的纺织整纬机运动控制系统,包括视觉采集器、控制器和执行机构;所述控制器包括图像处理模块和运动控制模块;执行机构包括伺服电机和通过伺服电机驱动的机械结构;所述视觉采集器和伺服电机均与控制器电连接。
14.在本实施例中,图像处理模块采用fpga芯片,运动控制模块采用arm芯片。
15.所述视觉采集器实时采集整纬机输出端的布料图像,并将采集的布料图像发送给控制器的图像处理模块,图像处理模块对布料图像进行图像处理,得到布料的角度偏差信息作为运动控制对象,并传送给运动控制模块。所述运动控制模块器接收到角度偏差信息后,计算得到角度偏差的变化率,基于模糊pid控制算法对角度偏差及其变化率进行闭环反馈控制,计算得到伺服电机转动的方向、速度与位置信息。并通过内部集成的运动控制电路将计算得到的伺服电机转动的方向、速度与位置信息发送至伺服电机,伺服电机开始转动,并带动机械结构运动。
16.所述模糊pid控制算法主要根据布料的角度偏差及其变化率作为闭环反馈控制对象来动态调整运动控制系统的pid参数,从而达到适应性强、稳定性高的目的。模糊pid控制算法主要包含三个步骤:模糊化、模糊推理和清晰化。所述模糊化是根据纺织整纬机运动控制系统对布料的角度偏差及其变化率进行模糊化处理,获得模糊输入量。所述模糊推理是根据模糊控制规则对模糊输入量进行模糊推理,获得模糊输出量。所述清晰化是基于最大隶属度法,通过隶属度函数推算出不同工况下纺织整纬机的适合pid参数。
17.在本实施例中,所述视觉采集器为设置在整纬机输出端上方的摄像头,所述摄像头的型号为全瑞视讯usb1080p01m。
18.在本实施例中,所述执行机构的机械结构包括皮带减速传动机构、丝杠和通过螺纹连接套设在丝杠上的弯辊拨杆;皮带减速传动机构包括小带轮、大带轮和转动皮带;所述丝杠通过轴承与整纬机转动连接,伺服电机固定安装在控制箱中,其输出轴与小带轮固定连接,丝杠的一端大带轮固定连接,小带轮和大带轮通过传动皮带连接,丝杠上的执行部件为整纬机的弯辊拨杆。所述运动控制模块器接收到角度偏差信息后,通过内部集成的运动控制电路将计算得到的伺服电机转动的方向、速度与位置信息发送至伺服电机,伺服电机开始转动,驱动丝杠转动,带动弯辊拨杆沿丝杠运动,进而控制布料的运动方向。通过设置小带轮和大带轮,起到减速的作用。
19.应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含
在本实用新型的保护范围之内。
技术特征:
1.一种基于模糊pid的纺织整纬机运动控制系统,其特征在于,包括视觉采集器、控制器和执行机构;所述控制器包括图像处理模块和运动控制模块;执行机构包括伺服电机和通过伺服电机驱动的机械结构;所述视觉采集器和伺服电机均与控制器电连接。2.根据权利要求1所述的基于模糊pid的纺织整纬机运动控制系统,其特征在于,所述视觉采集器为设置在整纬机输出端上方的摄像头。3.根据权利要求1或2所述的基于模糊pid的纺织整纬机运动控制系统,其特征在于,所述执行机构的机械结构包括皮带减速传动机构、丝杠和通过螺纹连接套设在丝杠上的弯辊拨杆;皮带减速传动机构包括小带轮、大带轮和转动皮带;所述丝杠通过轴承与整纬机转动连接,伺服电机固定安装在控制箱中,其输出轴与小带轮固定连接,丝杠的一端大带轮固定连接,小带轮和大带轮通过传动皮带连接。
技术总结
本实用新型公开了一种基于模糊PID的纺织整纬机运动控制系统,包括视觉采集器、控制器和执行机构;所述控制器包括图像处理模块和运动控制模块;执行机构包括伺服电机和通过伺服电机驱动的机械结构;所述视觉采集器和伺服电机均与控制器电连接。本实用新型基于模糊PID控制技术,对纺织整纬机的驱动系统进行控制,进一步优化了整纬机在多工况、大惯性下的精确作业能力,稳定性更高。稳定性更高。稳定性更高。
技术研发人员:杨军 王婷 王波 张鹏
受保护的技术使用者:南通职业大学
技术研发日:2021.03.18
技术公布日:2021/9/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

