1.本发明属于叉车技术领域,尤其涉及一种控制信号无缝链接叉车控制系统。
背景技术:
2.现有对叉车进行智能自动化改造所采取的方法通常是采取整体置换原来叉车的电机驱动,将原来为有人叉车所设计的驱动更换为自动化厂商所设计的电机驱动,从而实现有人叉车控制升级为可供计算机控制的无人叉车驱动。现有对有人叉车进行无人化改造的方法具有如下技术缺陷:1)由于一些厂商并未开放控制接口,因而采取这种方法对有人叉车进行升级的方法通用性较差。
3.2)由于需要更换整套电机驱动,并且购入新的电机驱动,因而成本相对较高。
4.3)由于更换第三方的电机驱动,使得叉车的整体性能变差,叉车属于特种车辆,作业要求稳定可靠,更换了第三方的驱动,由于没有经过原叉车厂商的型式实验或验证测试,存在不可预测的安全问题。
5.由于存在以上的技术缺陷,使得用户的升级改造成本大幅度增加的同时,还降低了安全性可靠性。
技术实现要素:
6.为克服现有技术方案中改造升级成本高、升级后稳定可靠性变差的问题,本发明的目的是提供一种控制信号无缝链接叉车控制系统,采用原厂控制接口以及计算机模拟传感器信号相结合的方式,实现对现有叉车的升级改造。
7.本发明解决其技术问题是通过以下的技术方案实现的:本发明提供了一种控制信号无缝链接叉车控制系统,包括can总线控制系统、叉车信号处理模块、adc转向信号处理模块、dac处理模块;所述can总线控制系统包括第一can控制器及第二can控制器;所述叉车信号处理模块与所述第一can控制器、第二can控制器、adc转向信号处理模块及dac处理模块通讯;所述第一can控制器用于与原车辆控制手柄连接;所述第二can控制器用于与原叉车控制器can通讯控制接口连接;所述第二can控制器还用于与无人叉车主控制器连接;所述adc转向信号处理模块用于与原车转向传感器连接;所述dac处理模块用于与原叉车控制器的转向控制接口连接;所述叉车信号处理模块用于通过所述第一can控制器获取原车辆控制手柄信号,通过所述adc转向信号处理模块获取原车转向传感器信号,对信号处理后,由所述第二can控制器及dac处理模块发送至原叉车控制器,驱动车辆执行工作任务;所述叉车信号处理模块还用于通过所述第二can控制器获取无人叉车主控制器的
控制信号,将所述控制信号分解成can信号及dac模拟信号,并由所述第二can控制器及dac处理模块发送至原叉车控制器,驱动车辆执行工作任务。
8.进一步地,所述第二can控制器还用于与叉车激光测距系统连接,用以与叉车激光测距系统通讯。
9.进一步地,所述第二can控制器还用于与叉车电池管理系统bms连接,用以与电池管理系统bms通讯。
10.进一步地,该系统还包括与所述叉车信号处理模块通讯的数字输出驱动模块,所述数字输出驱动模块用于与原车蜂鸣器及警示灯连接,用以控制蜂鸣器和警示灯。
11.进一步地,该系统还包括与所述叉车信号处理模块通讯的隔离数字输入模块,所述隔离数字输入模块用于与原车sick安全激光传感器、防撞条、急停按钮、手自动切换功能按钮连接,用以获取sick安全激光的状态信息、防撞条的状态信息、急停信号、手自动切换信号。
12.进一步地,所述隔离数字输入模块采用光耦隔离输入模块。
13.进一步地,该系统还包括用于与原车显示屏连接,用以输出叉车相关信息的串口模块。
14.进一步地,所述叉车控制系统采用工控机或嵌入式主机结构形式的控制信号输出设备。
15.借由上述方案,通过控制信号无缝链接叉车控制系统解决了有人叉车进行智能自动化升级改造的难题,该系统应用部署简单,对应不同厂商的叉车兼容性好,尤其适用于未开放控制接口的有人叉车的智能自动化改造,可轻松升级不开放/开放尤其不开放控制接口叉车为amr&agv,而无需改动叉车原有的属性(比如:特种设备),不减配叉车核心部件(如:叉车电机驱动),让amr&agv车体保持原有属性,amr&agv可更安全、更可靠,降低了智能制造成本。
16.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例详细说明如后。
附图说明
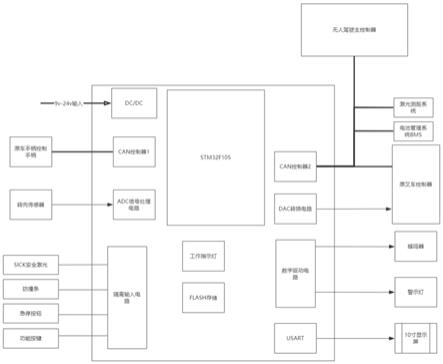
17.图1是本发明控制信号无缝链接叉车控制系统嵌入式板卡设计图;图2是本发明控制信号无缝链接叉车控制系统整车控制布置图;图3是本发明控制信号无缝链接叉车控制系统plc设计图。
具体实施方式
18.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实例用于说明本发明,但不用来限制本发明的范围。
19.参图1、图2所示,本实施例提供了一种控制信号无缝链接叉车控制系统,包括can总线控制系统、叉车信号处理模块(stm32f105芯片)、adc转向信号处理模块(adc转向信号处理电路)、dac处理模块(dac转换电路);can总线控制系统包括第一can控制器(can控制器1)及第二can控制器(can控制器2);
叉车信号处理模块与第一can控制器、第二can控制器、adc转向信号处理模块及dac处理模块通讯;第一can控制器用于与原车辆控制手柄连接;第二can控制器用于与原叉车控制器can通讯控制接口连接;第二can控制器还用于与无人叉车主控制器连接;adc转向信号处理模块用于与原车转向传感器连接;dac处理模块用于与原叉车控制器的转向控制接口连接;系统一共有两种工作模式,手动模式及自动模式。
20.手动模式:叉车信号处理模块用于通过第一can控制器获取原车辆控制手柄信号,通过adc转向信号处理模块获取原车转向传感器信号,对信号处理后,由第二can控制器及dac处理模块发送至原叉车控制器,驱动车辆执行工作任务,完成各种动作。
21.自动模式:系统(第二can控制器)屏蔽手柄传感器发出到第一can控制器的控制信号和到adc转向信号处理模块的模拟量信号。
22.叉车信号处理模块用于通过第二can控制器获取无人叉车主控制器的控制信号,将控制信号分解成can信号及dac模拟信号,并由第二can控制器及dac处理模块发送至原叉车控制器,驱动车辆执行工作任务,完成各种动作。
23.手自动切换的方式由手自动切换功能按钮实现,当按钮被按下时系统切换为手动模式,当按钮被释放系统切换为自动模式。
24.在本实施例中, 第二can控制器还用于与叉车激光测距系统连接,用以与叉车激光测距系统通讯。
25.在本实施例中, 第二can控制器还用于与叉车电池管理系统bms连接,用以与电池管理系统bms通讯。
26.在本实施例中,该系统还包括与叉车信号处理模块通讯的数字输出驱动模块,所述数字输出驱动模块用于与原车蜂鸣器及警示灯连接,用以控制蜂鸣器和警示灯。
27.在本实施例中,该系统还包括与所述叉车信号处理模块通讯的隔离数字输入模块,所述隔离数字输入模块用于与原车sick安全激光传感器、防撞条、急停按钮、手自动切换功能按钮连接,用以获取sick安全激光的状态信息、防撞条的状态信息、急停信号、手自动切换信号。本实施例中sick安全避障激光雷达,安装在叉车的两侧,激光雷达的保护角度为270
°
,保护半径为5m;防撞条采用压敏式材料,安装在叉车的四周,遇挤压变形后可输出数字信号,信号处理制模块得到信号后控制系统强制停车并发出信息反映到显示屏上以及通过can总线反馈到无人叉车主控制器以便进行下一步决策。
28.在本实施例中,所述隔离数字输入模块采用光耦隔离输入模块。
29.在本实施例中,该系统还包括用于与原车显示屏连接,用以输出叉车相关信息的串口模块;屏幕采用10寸lcd屏幕,安装在车辆的操作面板上,可输出车辆的手自动状态、报错信息、电量信息、行驶速度、举升高度、货物重量、货叉前移量、货叉倾斜度、安全状态等信息。
30.在本实施例中,该叉车控制系统可采用工控机或嵌入式主机结构形式的控制信号
输出设备。
31.该控制信号无缝链接叉车控制系统应用于所述叉车车体上,通过控制信号无缝智慧链接系统、叉车本车通讯系统,将计算机信号与叉车控制系统无缝链接,叉车控制信号通过计算机输出模拟这些信号输出从而模拟人工对叉车的控制输出,从而实现对车辆的完整控制而不需要考虑车辆是否开放控制接口;控制信号无缝链接车叉控制系统与无人叉车主控制器、激光测距系统、原车信号采集之间的数据通信采取can总线;该控制信号无缝链接车叉控制系统不仅仅应用于amr&agv叉车,还可应用于室内外作业的其他作业机械的智能自动化改造。
32.叉车信号处理模块采用9v
‑
24v宽电压输入供电,叉车信号处理模块上的主控芯片stm32f105rbt6提供两路can控制接口对手柄的控制信号进行转发和与主控制器进行通讯,信号处理模块连接着工作指示灯和故障指示灯。
33.本实施例在车辆最显眼的地方安装有紧急制动按钮,按下紧急制动按钮就会立即传到叉车信号处理模块触发紧急停车,进行紧急制动。
34.本实施例避障模块连接着sick安全激光传感器和防撞条,sick安全激光传感器可以在无接触的情况下检测到障碍物并且由叉车信号处理模块及时将车辆进行停车处理,防撞条可以在车辆接触到障碍物后立刻将信号传到叉车信号处理模块进行急停处理,以避免造成近一步的破坏。
35.本实施例激光测距模块(系统)作为无人叉车的远端传感器模块,通过can总线与叉车信号处理模块相连接,激光测距模块可以实时反馈货叉的高度、货叉到货物的距离、货叉的前移量等信息。
36.由于本实施例所采用can总线通讯是符合canopen协议标准的,所以还可以运用现有的i/o模块进行远端控制处理。
37.利用本实施例提供的控制信号无缝链接叉车控制系统针对某型号叉车的升级改造需要通过can总线信号的方式对叉车的货叉举升、主动轮行进电机的控制,而总线信号无法覆盖到的转向,甚至是转向位置反馈等信号则通过板卡上的模拟输入接口来读取sin
‑
cos编码器来获取位置信息,通过模拟输出接口来模拟用于手动调整转向信号的sin
‑
cos编码器信号输出完成转向的控制,最后can总线接口,将信息反馈给由主控系统已经接收主控系统下发指令完成对板卡的控制,从而实现无人驾驶叉车控制系统同叉车原有控制系统的无缝智慧链接。
38.如图3所示,在一实施例中,采用plc控制模块搭建将有人叉车升级为无人叉车,其结构包括plc主控制器、canopen模块、数字输入模块、数字输出模块、模拟输入模块、模拟输出模块,串口模块,各个plc模块根据需要增删。
39.该控制信号无缝链接叉车控制系统具有如下优势:1)无需改动现有叉车的结构属性,能够继续保持叉车原有的核心部件(如电机、驱动等),让车辆更安全可靠。
40.2)只需要简单对接原车的传感器接头,即可完成有人叉车到无人叉车的智能自动化升级。
41.3)比更换电机驱动的成本要低廉。
42.以上所述仅是本发明的优选实施方式,并不用于限制本发明,应当指出,对于本技
术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

