激光潜伏顶升agv
技术领域
1.本实用新型属于移动机器人技术领域,涉及一种激光潜伏顶升agv。
背景技术:
2.即自动导引小车,属于移动式机器人,是一种以电池为动力,装有非接触导向装置和独立寻址系统的无人驾驶自动化搬运车辆。它的主要特征表现为具有小车编程、停车选择装置、安全保护以及各种移载功能,并能在计算机的监控下按指令自主驾驶,自动沿着规定的导引路径行驶,到达指定地点,完成一系列作业任务。其系统技术和产品已经成为柔性生产线、柔性装配线、仓储物流自动化系统的重要设备和技术。
3.电磁导引、磁带导引、光学导引、惯性导航都是是较为传统的导引方式,目前仍被许多系统采用,通过在agv的行驶路径上铺设磁带、涂漆或粘贴色带等方式实现导航。主要优点是简单而可靠,便于控制和通讯,制造成本较低。缺点是路径难以更改扩展,对复杂路径的局限性大。
技术实现要素:
4.本实用新型目的是:提供一种激光潜伏顶升agv。
5.本实用新型的技术方案是:一种激光潜伏顶升agv,所述激光潜伏顶升agv包括行走系统、顶升系统、充电系统、控制系统和导航系统,
6.所述控制系统用于控制所述导航系统;
7.所述导航系统包括2个激光传感器,所述2个激光传感器安装在所述激光潜伏顶升agv前后两端的中间位置。
8.其进一步的技术方案是:所述顶升系统包括:升降驱动组件和升降传感器,所述升降传感器安装在所述升降驱动组件的四周,所述升降传感器控制所述升降驱动组件上升和下降。
9.其进一步的技术方案是:所述升降驱动组件包括升降电机、圆柱齿轮、滚珠丝杆、顶升支座和升降平台;
10.所述升降电机通过驱动器控制,所述升降电机通过控制所述圆柱齿轮转动,从而控制所述滚珠丝杆直线运动来控制所述升降平台的升降,所述滚珠丝杆外安装有所述顶升支座。
11.其进一步的技术方案是:所述升降平台的上方安装有补偿环,所述补偿环上方安装转盘,所述转盘为圆环形状,圆环中心位置安装有玻璃视窗,转盘上方安装有防滑垫。
12.其进一步的技术方案是:所述升降驱动组件还包括4个导向轴承,所述4个导向轴承安装在所述顶升支座的四周,所述4个导向轴承外安装有导向座。
13.其进一步的技术方案是:所述激光潜伏顶升agv还包括二维码传感器或imu传感器,所述二维码传感器安装在所述激光潜伏顶升agv的底部,所述imu传感器用于进行角度校正。
14.其进一步的技术方案是:所述激光潜伏顶升agv还包括逻辑控制器plc、hmi触摸屏、交换机、无线ap客户端和通信v模块,所述plc与所述hmi触摸屏通过串口或者以太网连接;所述plc与所述交换机通过以太网连接;所述plc与所述通信v模块通过以太网连接;所述交换机与所述无线ap客户端通过以太网连接;所述通信v模块与所述无线ap客户端通过以太网连接;所述通信v模块与所述导航系统通过串口连接。
15.其进一步的技术方案是:所述充电系统安装在所述激光潜伏顶升agv的前方或者后方的中间位置,所述激光潜伏顶升agv包括充电刷,所述充电刷底部设置有充电板,用于与充电桩连接以为所述激光潜伏顶升agv充电。
16.其进一步的技术方案是:所述激光潜伏顶升agv的四周设置有n个吊环,n为大于等于2的整数。
17.其进一步的技术方案是:所述行走系统包括4个万向轮和2个行走驱动组件,所述4个万向轮安装在所述激光潜伏顶升agv的4个角,所述2个行走驱动组件安装在所述激光潜伏顶升agv底部的左右两侧,所述行走驱动组件包括驱动轮和伺服电机,所述伺服电机控制所述驱动轮转动,所述伺服电机通过驱动器驱动。
18.本实用新型的优点是:
19.通过在激光潜伏顶升agv的前后两端的中间位置设置2个激光传感器,即可根据2个激光传感器实现导航,无需设置反光板或者铺设磁条等辅助物进行导航,解决了现有技术中路径难以更改扩展,对复杂路径局限性大的问题,达到了可以灵活设置的效果。
20.通过底部安装二维码传感器,进而在特殊情况下实现小车的二次定位;通过设置imu传感器即可实现激光潜伏顶升agv的角度的校正。
21.顶升系统中设置有升降传感器,可以灵活的控制升降的高度。另外,上述激光潜伏顶升agv载重高,不仅适用于物流行业搬运,也适用工厂货物搬运。
附图说明
22.下面结合附图及实施例对本实用新型作进一步描述:
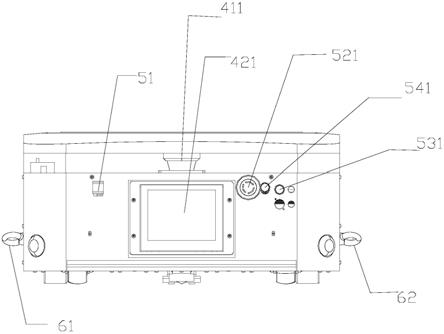
23.图1是本技术实施例提供的激光潜伏顶升agv的前示意图;
24.图2是本技术实施例提供的激光潜伏顶升agv的后示意图;
25.图3是本技术实施例提供的激光潜伏顶升agv的顶升系统的侧视图;
26.图4是本技术实施例提供的激光潜伏顶升agv的顶升系统的俯视图;
27.图5是本技术实施例提供的激光潜伏顶升agv的顶升系统的仰视图;
28.图6是本技术实施例提供的激光潜伏顶升agv的仰视图;
29.图7是本技术实施例提供的激光潜伏顶升agv的驱动层图;
30.图8为本技术提供的激光潜伏顶升agv的整体结构的示意图。
31.其中:111、112、113、114为4个万向轮;121、122为2个驱动轮;123、124为2个伺服电机;211为升降电机;212为圆柱齿轮;213为滚珠丝杆;214为顶升支座;215为升降平台;221、222、223、224为4个导向轴承;225、226、227、228为4个导向座;23为升降传感器;241为补偿环;242为转盘;243为玻璃视窗;244为防滑垫;311为充电刷;312为充电板;313为48v锂电池;314为48v转24v开关电源; 315 为48v转12v开关电源; 316为48v转5v开关电源;41为工业控制计算机;411、412为2个激光传感器;42为逻辑控制器plc;421为hmi触摸屏,422为交
换机,423为无线ap客户端,424、425为行走系统驱动器,426为顶升系统驱动器;43为接触器;51为电源开关,521、522为控制agv小车的总电源的急停按钮;531、532为启动按钮;541、542为复位按钮;61、62、63、64为4个吊环。
具体实施方式
32.实施例:
33.请参考图1和图2,其示出了本技术实施例提供的激光潜伏顶升agv的前后示意图,图3至图5依次为本技术提供的激光潜伏顶升agv的顶升系统的侧视、俯视和仰视图,图6和图7为本技术提供的激光潜伏顶升agv的仰视图和驱动层图,结合图1至图7,该激光潜伏顶升agv包括:行走系统、顶升系统、充电系统、控制系统和导航系统。
34.控制系统控制行走系统、顶升系统、充电系统和导航系统。
35.导航系统包括2个激光传感器411,412,2个激光传感器安装在激光潜伏顶升agv前后两端的中间位置。
36.行走系统包括4个万向轮111、112、113、114和2个行走驱动组件,4个万向轮安装在激光潜伏顶升agv的4个角,2个行走驱动组件安装在激光潜伏顶升agv底部的左右两侧,行走驱动组件包括驱动轮121、122和伺服电机123、124,伺服电机123、124控制驱动轮121、122转动,伺服电机通过驱动器324、325驱动。其中,每个驱动轮对应于一个伺服电机和控制伺服电机的驱动器。
37.顶升系统包括:升降驱动组件和升降传感器23,升降传感器23安装在升降驱动组件的四周,升降传感器23控制升降驱动组件上升和下降。升降传感器23,安装在升降驱动组件四周任意位置,控制升降平台上升和下降的位置。本发明优选为接近开关,升降感应片在接近开关的感应区域内活动,接近开关根据感应片的位置发出电气指令,反应顶升系统的位置和行程。
38.升降驱动组件包括升降电机211、圆柱齿轮212、滚珠丝杆213、顶升支座214和升降平台215。
39.升降电机211通过驱动器控制,升降电机211通过控制圆柱齿轮212转动,从而控制滚珠丝杆213直线运动来控制升降平台215的升降,滚珠丝杆213外安装有顶升支座214。
40.升降平台215的上方安装有补偿环241,补偿环241上方安装转盘242,转盘242为圆环形状,圆环中心位置安装有玻璃视窗243,转盘上方安装有防滑垫244。
41.升降驱动组件还包括4个导向轴承221、222、223、224, 4个导向轴承221、222、223、224安装在顶升支座214的四周, 4个导向轴承外安装有导向座225、226、227、228。
42.充电系统安装在激光潜伏顶升agv的前方或者后方的中间位置,激光潜伏顶升agv包括充电刷311,充电刷311底部设置有充电板312,用于与充电桩连接以为激光潜伏顶升agv充电。充电系统还包括48v锂电池313;48v转24v开关电源314;48v转12v开关电源315;48v转5v开关电源316,本实施例对此并不做限定。
43.控制系统可以为工业控制计算机41,用于控制导航系统的运行。
44.激光潜伏顶升agv还包括ant盒子213,二维码传感器或惯性传感器imu(inertial measurement unit,惯性测量单元),二维码传感器安装在激光潜伏顶升agv的底部,imu传感器用于进行角度校正。
45.请参考图8,激光潜伏顶升agv还包括plc(programmable logic controller,可编程逻辑控制器)、hmi(人机界面)触摸屏421、交换机422、无线ap(accesspoint,无线接入点)客户端423、通信v模块、行走系统驱动器424、425,顶升系统驱动器426,plc42与hmi触摸屏421通过串口或者以太网连接;plc42与交换机422通过以太网连接;plc与通信v模块通过以太网连接;交换机422与无线ap客户端423通过以太网连接;通信v模块与无线ap客户端423通过以太网连接;通信v模块与导航系统通过串口连接。其中,图中的电池即为以上所述的48v锂电池313;48v转24v开关电源314;48v转12v开关电源315;48v转5v开关电源316。当然实际实现时,激光潜伏顶升agv还可以包括诸如安全扫描仪之类的其他组件,本实施例对此并不做限定。
46.激光潜伏顶升agv的四周设置有n个吊环,n为大于等于2的整数。比如,四角安装有4个吊环61、62、63、64,用于运输等特殊情况下小车的搬运工作。
47.此外,在上述实施例中,激光潜伏顶升agv还可以包括辅件,辅件包括控制电力负载的接触器43;用于控制agv的总电源的电源开关51;急停按钮521,522,用于遇到紧急情况可控制此按钮以控制小车急停;控制agv启动的启动按钮531,532;以及,控制agv小车复位的复位按钮541,542。
48.综上所述,本技术提供的激光潜伏顶升agv,通过在激光潜伏顶升agv的前后两端的中间位置设置2个激光传感器,即可根据2个激光传感器实现导航,无需设置反光板或者铺设磁条等辅助物进行导航,解决了现有技术中路径难以更改扩展,对复杂路径局限性大的问题,达到了可以灵活设置的效果。
49.通过底部安装二维码传感器,进而在特殊情况下实现小车的二次定位;通过设置imu传感器即可实现激光潜伏顶升agv的角度的校正。
50.顶升系统中设置有升降传感器,可以灵活的控制升降的高度。另外,上述激光潜伏顶升agv载重高,不仅适用于物流行业搬运,也适用工厂货物搬运。
51.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含所指示的技术特征的数量。由此,限定的“第一”、“第二”的特征可以明示或隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或者两个以上。
52.上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。
53.以上所述仅为本技术的较佳实施例,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

