1.本实用新型属于移动式机器人技术领域,涉及一种激光滚筒小车。
背景技术:
2.即自动导引小车,属于移动式机器人,是一种以电池为动力,装有非接触导向装置和独立寻址系统的无人驾驶自动化搬运车辆。它的主要特征表现为具有小车编程、停车选择装置、安全保护以及各种移载功能,并能在计算机的监控下按指令自主驾驶,自动沿着规定的导引路径行驶,到达指定地点,完成一系列作业任务。其系统技术和产品已经成为柔性生产线、柔性装配线、仓储物流自动化系统的重要设备和技术。
3.现有方案中,在在物体搬运时,需要人工将物体搬运至小车中的指定位置,进而通过小车运送。
技术实现要素:
4.本实用新型目的是:提供一种激光滚筒小车,进而解决现有方案中需要人工搬运物体的问题。
5.本实用新型的技术方案是:一种激光滚筒小车,所述激光滚筒小车包括行走系统、滚动系统、充电系统、控制系统和导航系统,
6.所述滚动系统安装在所述激光滚筒小车的上方,所述滚动系统包括滚筒组件、传感器组件、顶升组件;所述滚筒组件包括电机、驱动传动组件、从动传动组件以及至少两个滚筒;
7.所述电机驱动所述驱动传动组件,所述驱动传动组件与两个滚筒相连,其余滚筒通过所述从动传动组件相连。
8.其进一步的技术方案是:所述传感器组件包括每个滚筒所对应的至少一个传感器,每个滚筒所对应的传感器设置在所述滚筒的上方,用于检测物体是否运输到对应位置。
9.其进一步的技术方案是:所述顶升组件设置在所述滚筒组件的两侧,每侧的所述顶升组件包括推杆电机、电机固定板、顶升挡板、导轨和滑块;所述推杆电机控制所述电机固定板上升,从而带动所述顶升挡板上升,所述导轨和所述滑块固定上升方向。
10.其进一步的技术方案是:所述激光滚筒小车还包括滚动系统驱动器,所述滚动系统驱动器用于驱动所述滚动系统。
11.其进一步的技术方案是:所述控制系统用于控制所述导航系统;
12.所述导航系统包括2个激光传感器,所述2个激光传感器安装在所述激光滚筒小车的前后对角位置。
13.其进一步的技术方案是:所述激光滚筒小车还包括二维码传感器或imu传感器,所述二维码传感器安装在所述激光滚筒小车的底部,所述imu传感器用于进行角度校正。
14.其进一步的技术方案是:所述激光滚筒小车还包括逻辑控制器plc、hmi触摸屏、交换机、无线ap客户端和通信v模块,所述plc与所述hmi触摸屏通过串口或者以太网连接;所
述plc与所述交换机通过以太网连接;所述plc与所述通信v模块通过以太网连接;所述交换机与所述无线ap客户端通过以太网连接;所述通信v模块与所述无线ap客户端通过以太网连接;所述通信v模块与所述导航系统通过串口连接。
15.其进一步的技术方案是:所述充电系统安装在所述激光滚筒小车的前方或者后方的中间位置,所述激光滚筒小车包括充电刷,所述充电刷底部设置有充电板,用于与充电桩连接以为所述激光滚筒小车充电。
16.其进一步的技术方案是:所述行走系统包括4个万向轮和2个行走驱动组件,所述4个万向轮安装在所述激光滚筒小车的4个角,所述2个行走驱动组件安装在所述激光滚筒小车底部的左右两侧,所述行走驱动组件包括驱动轮和伺服电机,所述伺服电机控制所述驱动轮转动,所述伺服电机通过驱动器驱动。
17.其进一步的技术方案是:所述激光滚筒小车还包括用于驱动所述行走系统的行走系统驱动器。
18.本实用新型的优点是:
19.通过提供一种包括滚动系统的激光滚筒小车,该滚动系统安装在激光滚筒小车的上方,滚动系统包括滚筒组件、传感器组件、顶升组件;滚筒组件包括电机、驱动传动组件、从动传动组件以及至少两个滚筒;电机驱动该驱动传动组件,驱动传动组件与两个滚筒相连,其余滚筒通过从动传动组件相连。解决了现有技术中需要人工搬运物体的问题,达到了可以通过滚筒系统实现小车中物体可以自动搬运的效果。
附图说明
20.下面结合附图及实施例对本实用新型作进一步描述:
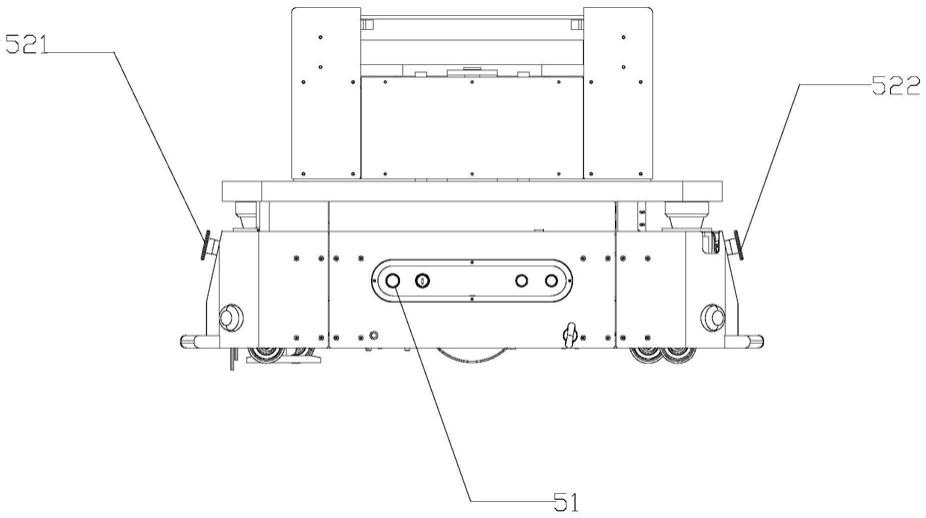
21.图1是本技术实施例提供的激光滚筒小车的侧面的结构示意图;
22.图2是本技术实施例提供的激光滚筒小车中的滚动系统的结构示意图;
23.图3为本技术实施例提供的滚动系统的侧面示意图;
24.图4为本技术实施例提供的激光滚动小车的仰视示意图;
25.图5为本技术实施例提供的激光滚动小车的电气层的示意图;
26.图6为本技术实施例提供的激光滚动小车的结构框图。
27.其中:111、112、113、114为万向轮;121、122为驱动轮;123、124为伺服电机;211为电机;212为驱动传动组件;213为从动传动组件;214为第一滚筒;215为第二滚筒;221、222、223、224为对射传感器;231、232为推杆电机;233、234为电机固定板;235、236为顶升挡板;237、238为导轨;239、240为滑块;311为充电刷;312为充电板;313为锂电池;314为48v转24v开关电源;315为48v转5v开关电源;411、412为激光传感器;413为二维码导航传感器/imu传感器;431、432为行走系统驱动器;433为滚定系统驱动器;51为电源开关;521、522为急停按钮。
具体实施方式
28.实施例:
29.请参考图1至图5,其示出了本技术实施例提供的激光滚筒小车的结构示意图,结合图1至图5,激光滚筒小车包括行走系统、滚动系统、充电系统、控制系统和导航系统。
30.滚动系统安装在激光滚筒小车的上方,滚动系统包括滚筒组件、传感器组件、顶升组件;滚筒组件包括电机211、驱动传动组件212、从动传动组件213以及至少两个滚筒。
31.电机211驱动驱动传动组件212,驱动传动组件212与两个滚筒相连,比如,驱动传动组件与第一滚筒214和第二滚筒215连接。其余滚筒通过从动传动组件213相连。实际实现时,传动组件可以为链条。
32.驱动传动组件212转动从而带动第一滚筒、第二滚筒滚动,由此带动与第一、第二滚筒相邻的其它滚筒滚动,继而所有的滚筒都可以滚动。
33.传感器组件包括每个滚筒所对应的至少一个传感器,每个滚筒所对应的传感器设置在滚筒的上方,用于检测物体是否运输到对应位置。本方案优选为两组对射传感器,221、222和223、224。
34.顶升组件设置在滚筒组件的两侧,每侧的顶升组件包括推杆电机、电机固定板、顶升挡板、导轨和滑块;推杆电机控制电机固定板上升,从而带动顶升挡板上升,导轨和滑块固定上升方向。比如,包括推杆电机231、232,电机固定板233、234,顶升挡板235、236,导轨237、238,滑块239、240。推杆电机控制电机固定板上升,从而带动顶升挡板上升,达到固定搬运物体的作用。导轨和滑块起到固定上升方向的作用,保证顶升挡板上升方向垂直。
35.激光滚筒小车还包括滚动系统驱动器433,滚动系统驱动器433用于驱动滚动系统。
36.控制系统用于控制导航系统。
37.导航系统包括2个激光传感器411、412,2个激光传感器安装在激光滚筒小车的前后对角位置。
38.激光滚筒小车还包括二维码传感器或惯性传感器imu(inertial measurement unit,惯性测量单元)413,二维码传感器安装在激光滚筒小车的底部,imu传感器用于进行角度校正。
39.请参考图6,激光滚筒小车还包括plc(programmable logic controller,可编程逻辑控制器)、hmi(人机界面)触摸屏、交换机、无线ap(accesspoint,无线接入点)客户端、通信v模块、行走系统驱动器,顶升系统驱动器,plc与hmi触摸屏通过串口或者以太网连接;plc与交换机通过以太网连接;plc与通信v模块通过以太网连接;交换机与无线ap客户端通过以太网连接;通信v模块与无线ap客户端通过以太网连接;通信v模块与导航系统通过串口连接。其中,图中的电池即为以上所述的48v锂电池313;48v转24v开关电源314; 315为48v转5v开关电源。当然实际实现时,激光滚筒小车还可以包括诸如安全扫描仪之类的其他组件,本实施例对此并不做限定。
40.此外,在上述实施例中,激光滚筒小车还可以包括辅件,辅件包括控制电力负载的接触器;用于控制agv的总电源的电源开关51;急停按钮521,522,用于遇到紧急情况可控制此按钮以控制小车急停;控制agv启动的启动按钮;以及,控制agv小车复位的复位按钮。
41.充电系统安装在激光滚筒小车的前方或者后方的中间位置,激光滚筒小车包括充电刷311,充电刷311底部设置有充电板312,用于与充电桩连接以为激光滚筒小车充电。
42.行走系统包括4个万向轮111、112、113、114和2个行走驱动组件,4个万向轮安装在自动导引小车的4个角,2个行走驱动组件安装在自动导引小车底部的左右两侧,行走驱动组件包括驱动轮121、122和伺服电机123、124,伺服电机123、124控制驱动轮121、122转动,
伺服电机通过驱动器驱动。其中,每个驱动轮对应于一个伺服电机和控制伺服电机的驱动器。
43.激光滚筒小车还包括用于驱动行走系统的行走系统驱动器431、432。
44.综上所述,本技术通过提供一种包括滚动系统的激光滚筒小车,滚动系统安装在激光滚筒小车的上方,滚动系统包括滚筒组件、传感器组件、顶升组件;滚筒组件包括电机、驱动传动组件、从动传动组件以及至少两个滚筒;电机驱动驱动传动组件,驱动传动组件与两个滚筒相连,其余滚筒通过从动传动组件相连。解决了现有技术中需要人工搬运物体的问题,达到了可以通过滚筒系统实现小车中物体可以自动搬运的效果。
45.另外,上述激光滚筒小车占地面积小,可以与生产线对接,进而适用于地面较为狭窄的环境。
46.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含所指示的技术特征的数量。由此,限定的“第一”、“第二”的特征可以明示或隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或者两个以上。
47.上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。
48.以上所述仅为本技术的较佳实施例,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

