1.本实用新型涉及红外成像系统稳像装置领域,具体涉及一种基于微动机构的稳像装置。
背景技术:
2.现有技术中,稳像方式采用平台稳像或电子稳像的方式。平台稳像方式为伺服电机控制光学镜头和探测器进行补偿运动,维持光轴稳定,但缺点在于动态范围较低;电子稳像方式采用图像处理方法,对连续多帧图像进行处理获取稳像数据,但缺点在于会降低图像帧频并引入图像延迟。
技术实现要素:
3.本实用新型的一个目的是解决现有技术的电子稳像方式会引入图像延迟的缺陷。
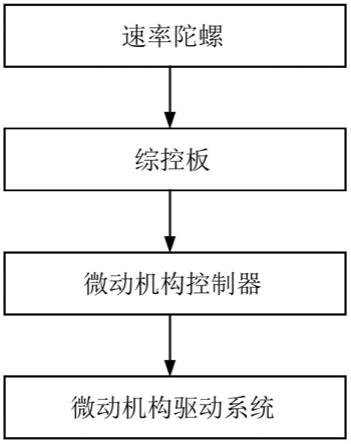
4.根据本实用新型的第一方面,提供了一种基于微动机构的稳像装置,包括依次连接的速率陀螺、综控板、微动机构控制器以及微动机构驱动系统;其中速率陀螺的采集输出端与综控板的采集输入端连接;综控板的控制输出端与微动机构控制器的控制输入端连接,微动机构控制器的控制输出端与微动机构控制系统的控制输入端连接。
5.优选地,微动机构驱动系统包括驱动电路、测量电路和电容位移传感器,其中驱动电路的输入端与微动机构控制器的驱动控制端连接,驱动电路的输出端与压电陶瓷连接;测量电路的输入端与电容位移传感器的采集输出端连接,测量电路的输出端与微动机构控制器的测量采集端连接。
6.优选地,电容位移传感器的型号为cyw
‑
dw
‑
c025。
7.优选地,微动机构控制器的型号为c8051f020。
8.优选地,综控板为fpga控制板。
9.本实用新型的有益效果是:1、提供了一种稳像方式的硬件实现,用以替代现有技术中的电子稳像方式;2、提升了系统的运动带宽,提高了抑制高频扰动引起的图像模糊的能力;3、相比于电子稳像方法,该方法不会产生延迟或降低输出图像帧频。
10.通过以下参照附图对本实用新型的示例性实施例的详细描述,本实用新型的其它特征及其优点将会变得清楚。
附图说明
11.被结合在说明书中并构成说明书的一部分的附图示出了本实用新型的实施例,并且连同其说明一起用于解释本实用新型的原理。
12.图1为本实用新型一个实施例的原理框图;
13.图2为本实用新型一个实施例的结构图;
14.图3为本实用新型一个实施例的微动机构控制器的控制原理框图;
15.图4为本实用新型一个实施例的压电陶瓷驱动电路图;
16.图5为本实用新型一个实施例的速率陀螺外围电路连接图。
具体实施方式
17.现在将参照附图来详细描述本实用新型的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本实用新型的范围。
18.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。
19.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
20.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
21.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
22.本实用新型提供一种基于微动机构的稳像装置,如图1所示,包括依次连接的速率陀螺、综控板、微动机构控制器以及微动机构驱动系统;其中速率陀螺的采集输出端与综控板的采集输入端连接;综控板的控制输出端与微动机构控制器的控制输入端连接,微动机构控制器的控制输出端与微动机构控制系统的控制输入端连接。
23.进一步地,微动机构驱动系统包括驱动电路、测量电路和电容位移传感器,其中驱动电路的输入端与微动机构控制器的驱动控制端连接,驱动电路的输出端与压电陶瓷连接;测量电路的输入端与电容位移传感器的采集输出端连接,测量电路的输出端与微动机构控制器的测量采集端连接。
24.在一个实施例中,电容位移传感器的型号为cyw
‑
dw
‑
c025。微动机构控制器的型号为c8051f020。综控板为fpga控制板。本实用新型中的微动机构驱动系统有多种选择,可以使用现有技术中已有的x
‑
y二维微动控制台,也可以使用如图2中所示的电容位移传感器、驱动电路、测量电路的形式来实现。
25.本实用新型的原理是,将探测器安装到微动机构支撑框架上,当光学镜组输出光轴出现扰动时,通过控制微动机构平动,维持光轴在焦平面上的位置,从而达到稳像的效果。相比于平台稳像的方式,微动机构的动态性能更强,可应对更强的扰动。相对于电子稳像的方式,该稳像方式具有更小的延迟,且不降低图像输出帧频。
26.需要说明的是,由于本实用新型的目的在于提供一种电路系统,图2 中的压电陶瓷和支撑框架仅为了说明传感器安装的位置、驱动电路的驱动对象以及测量电路的测量对象,因此未公开压电陶瓷和支撑框架的详细参数和结构图,无论其结构如何,都不影响本实用新型电路系统的实现。
27.图3示出了一种微动机构控制器的控制原理,控制器通过放大电路和驱动电路使框架运动,并且通过位移传感器检测框架的运动,通过数模转换电路转换和测量后发送至控制器。
28.图4示出了一种压电陶瓷驱动原理,其中v
m
为输入电压,pzt为压电陶瓷,pa93和op均为放大器。其中压电陶瓷的充电电流和输入电压成比例,比例系数为反馈电阻的阻值。图
4示出的是电流控制型驱动器,根据压电陶瓷的位移与其所带的电荷量呈线性关系的原理,通过精确控制压电陶瓷的充电电流以及时间来控制压电陶瓷的充电量,进而实现线性驱动。
29.图5为速率陀螺的接线图,本实用新型的一个实施例选用mpu6050实现采集功能。
30.本实用新型仅要求保护硬件连接关系,不依赖于软件实现。本实用新型的目的在于使用硬件系统代替传统的图像稳像方式,当硬件连接方式以及元件选型确定后,本领域的技术人员可以根据现有技术的知识确定控制逻辑,本实用新型对此不做限制。
31.<实施例>
32.本实用新型的一个实施例如图2所示,包括微动机构系统1、速率陀螺2、探测器3、光学镜头4、微动机构控制器5、综控板6。速率陀螺测量弹体扰动,获取弹体扰动信息,通过rs422发送给综控板。综控板通过 canfd与弹上计算机通信,获取弹体飞行姿态信息。并根据接受到的陀螺以数据,计算出微动机构的运动补偿量,将补偿量发送给微动机构控制器。微动机构控制器根据综控板接收到的控制指令,通过根据高精度传感器检测到的位移信息,控制压电陶瓷进行闭环控制,从而使微动机构根据规划曲线运动。利用微动机构的运动控制入射光线的反射角度。
33.本实施例中,微动机构系统1包含压电陶瓷、安装红外探测器的支撑框架、高精度传感器组成。根据微动机构控制器5的控制量,通过驱动压电陶瓷控制框架运动以及高精度传感器框架的运动位置,完成框架的闭环控制。速率陀螺2用于感知载体扰动,由综控板6采集并通过光学镜头4 控制框架运动,削弱载体扰动对非制冷探测器红外成像的影响。探测器3,用于接收焦平面上的红外信号,生成红外图像。光学镜头4用于滤除杂散光,将红外线聚焦到探测器焦平面上。微动装置控制器5用于根据综控板 6的控制信号控制微动装置系统1运动,从而使光轴在探测器采样时间内稳定。综控板6用于根据弹体的运动状态,以及由速率陀螺2感知到的弹体扰动,得出补偿数据,并发送给微动机构控制器5。
34.本实施例的一个工作过程是:外界输入的红外信号经成型装置的光学镜组滤除杂散光后,红外波段的光信号聚焦到红外探测器的光敏面上。综控板根据弹体飞行状态信息以及速率陀螺检测的弹体扰动,并将处理后的信号发送给微动机构控制器,微动机构控制器根据指令内容控制微动机构系统利用高精度传感器和压电陶瓷完成闭环控制,进而控制载有探测器的框架移动位置,补偿由弹体飞行及扰动引起的光轴偏移。
35.虽然已经通过例子对本实用新型的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本实用新型的范围。本领域的技术人员应该理解,可在不脱离本实用新型的范围和精神的情况下,对以上实施例进行修改。本实用新型的范围由所附权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

