车载荧幕的控制系统及其切换方法
【技术领域】
1.本发明是关于车用电子装置的控制技术,尤其是一种车载荧幕控制系统及其切换方法。
背景技术:
2.智能型车辆已成为目前汽车业发展的主要趋势,为提供驾驶人与智能型车辆之间的沟通,通常车辆会搭配各种车用电子装置以提供多样化的功能,例如:卫星导航、车况提供、影音播放、即时通信等等。然而,多样化的功能或互动往往需要通过车载荧幕来达成。
3.为使得车用电子装置能提供更良好的操控性,车载荧幕除了显示的功能之外,更会进一步提供触控的功能,以达到更佳的效能。
技术实现要素:
4.然而,驾驶人在观看或操作车载荧幕时会使驾驶人分心而增加发生交通事故的机会。有鉴于此,本发明提供一种车载荧幕的控制系统及其切换方法,借以避免驾驶人于车载车速过快的情况下因为操作或观看荧幕而分心。
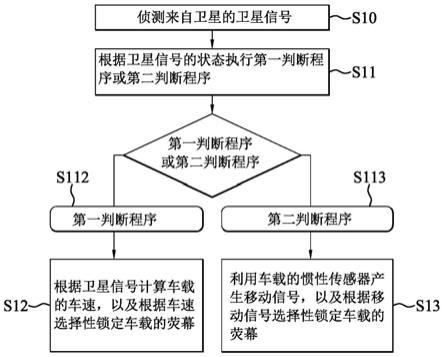
5.在一些实施例中,车载荧幕的切换方法包括侦测来自至少一卫星的至少一卫星信号、根据至少一卫星信号的状态执行第一判断程序或第二判断程序、于执行第一判断程序时根据至少一卫星信号计算车载的车速以及根据车速选择性锁定车载的荧幕,以及于执行第二判断程序时利用车载的惯性传感器产生移动信号以及根据移动信号选择性锁定车载的荧幕。
6.在一些实施例中,车载荧幕的控制系统包括全球定位系统、惯性传感器及控制电路。全球定位系统用以侦测来自至少一卫星的至少一卫星信号。惯性传感器用以感测车载的运动并对应生成至少一运动状态值。控制电路耦接全球定位系统与惯性传感器。控制电路用以根据至少一卫星信号的状态执行第一判断程序或第二判断程序。于执行第一判断程序时,控制电路根据至少一卫星信号计算车载的车速并根据车速选择性锁定车载的荧幕。于执行第二判断程序时,控制电路根据至少一运动状态值产生移动信号并根据移动信号选择性锁定车载的荧幕。
7.综上所述,在任一实施例的车载荧幕的控制系统及切换方法中,其能因应车载的行车环境切换判断机制,以因应车载的行车环境以不同的判断程序侦测车速并适时地自动锁定荧幕,借以有效地确保行车安全。
【附图说明】
8.图1是本发明一实施例的车载荧幕控制系统的方框图。
9.图2是图1的车载荧幕控制系统应用于车载上的示意图。
10.图3是本发明一实施例的车载荧幕切换方法的流程图。
11.图4是图3中步骤s11—s13的示范例的细部流程图。
12.图5是图4中步骤s122的示范例的细部流程图。
13.图6是图4中步骤s131—132的示范例的细部流程图。
【具体实施方式】
14.参考图1,在一些实施例中,车载荧幕控制系统20包括全球定位系统21、惯性传感器23及控制电路22。车载荧幕控制系统20连接到荧幕30。控制电路22耦接全球定位系统21、惯性传感器23与荧幕30。
15.参考图2,在一些示范例中,车载荧幕控制系统20可应用于车载上。其中,车载可为各种车辆10。在一示范例中,车载荧幕控制系统20可以通过车辆10本身内装的车用电子装置实现。换言之,全球定位系统21、惯性传感器23与控制电路22配置于车辆10本身。举例来说,全球定位系统21、惯性传感器23与控制电路22可由车辆10上的车载单元(on board unit,obu)实现。并且,荧幕30则可为车辆10的仪表板面或内装上的内嵌式荧幕,如图2所示。
16.在另一些示范例中,车载荧幕控制系统20可以通过设置于车辆10上的可携式电子装置来实现。换言之,全球定位系统21、惯性传感器23与控制电路22配置于可携式电子装置上。此时,荧幕30则可为可携式电子装置的荧幕或者为车辆10的仪表板面或内装上的内嵌式荧幕。举例而言,全球定位系统21、惯性传感器23、控制电路22及荧幕30可为可携式电子装置所具有的对应的模块。于此,此可携式电子装置可选择性由车辆10供电。在另一范例中,全球定位系统21、惯性传感器23及控制电路22可为可携式电子装置所具有的对应的模块,而荧幕30为车辆10本身所具有的内嵌式荧幕。于此,可携式电子装置可电性连接车辆10的车载单元,以致使可携式电子装置能适时地产生控制信号给车辆10的车载单元以控制车载单元锁定车辆10的内嵌式荧幕。
17.在另一示范例中,车载荧幕控制系统20也可以通过车辆10与设置于车辆10上的可携式电子装置来实现。换言之,全球定位系统21、惯性传感器23与控制电路22中的至少一者配置于可携式电子装置上,而全球定位系统21、惯性传感器23与控制电路22中的剩余者配置于车辆10本身。此时,荧幕30则可为可携式电子装置的荧幕或者为车辆10的仪表板面或内装上的内嵌式荧幕。举例而言,全球定位系统21与控制电路22可为可携式电子装置所具有的对应的模块,而惯性传感器23与荧幕30为车辆10所具有的对应的模块。可携式电子装置可电性连接车辆10的车载单元以读取车辆10配置的惯性传感器23并适时地锁定车辆10的内嵌式荧幕。
18.其中,可携式电子装置可例如汽车导航装置、智能型手机或平版电脑等,并不以上述举例为限。
19.参考图3,车载荧幕控制系统20在执行其切换方法中,首先,由全球定位系统21(global positioning system,gps)用以侦测来自至少一卫星的至少一卫星信号(步骤s10)。在一些实施例中,本说明书中所指的卫星可以是美国的gps系统卫星、俄罗斯的glonass系统卫星、欧盟的galileo系统卫星或是中国的北斗系统卫星,并不以上述举例为限。
20.接下来,控制电路22接收全球定位系统21所递来的卫星信号,并且根据卫星信号的状态执行第一判断程序或第二判断程序(步骤s11)。其中,例如是依据卫星的nmea码
(nmea code,national marine electronics association)的资料与其有效性来执行第一判断程序或第二判断程序。
21.当控制电路22判断必须执行第一判断程序时,控制电路22根据卫星信号计算车载的车速并根据车速选择是否锁定车载的荧幕30(步骤s12)。也就是说,当控制电路22判断车速过快的时候,例如车速超过20km/s,会锁定车载的荧幕30,借以避免驾驶人在高速驾驶的同时操控或观看车载荧幕30而造成的危险。在一些实施例中,卫星信号的状态包括卫星信号的强弱、所接收到的卫星数量等等。
22.当控制电路22判断必须执行第二判断程序时,控制电路22接收车载上的惯性传感器23所产生的至少一运动状态值,根据接收到的运动状态值产生移动信号,并且根据移动信号选择是否锁定车载的荧幕30(步骤s13)。也就是说,当卫星信号不佳而无法得知正确或可能误判车速的时候,控制电路22会改采行第二判断程序,而利用非卫星信号以外的资讯来判读车速,以确认是否必须锁定荧幕30。在一些实施例中,惯性传感器23用以感测车载的运动并对应生成运动状态值。于此,运动状态值是指惯性传感器23所测量到车载的运动状态的数值的其中之一或数种。
23.如此,车载荧幕控制系统20可以避免因高楼遮蔽、气候、卫星损坏等状况造成无法判别车速或误判车速的影响。
24.在一些实施例中,卫星信号的状态包括全球定位系统21能够接收到卫星信号的卫星的卫星数量。参考图4,在步骤s11的一些实施例中,控制电路22根据卫星信号的状态得到卫星的卫星数量(步骤s110)。然后,控制电路22判断得到的卫星数量是否大于数量阀值(步骤s111)。若卫星数量大于数量阀值时,控制电路22执行第一判断程序(步骤s112)。若卫星数量不大于数量阀值时,控制电路22执行第二判断程序(步骤s113)。
25.在一些实施例中,卫星数量与数量阀值为正整数。在一些实施例中,数量阀值为3以上的正整数。在一些实施例中,为计算车载的2d位置(纬度和经度)及轨道移动,必须接收至少3颗卫星的卫星信号,故而数量阀值可以为3。在一示范例中,在步骤s111中,当卫星数量大于等于3时,控制电路22执行第一判断程序,也就是接续进行步骤s12。在步骤111中,当卫星数量为小于3时(也就是卫星数量为0—2的状况),控制电路22执行第二判断程序,也就是接续进行步骤s13。在一些实施例中,若卫星数量是大于2,但因gps接收到的卫星信号的状态是无效的,仍判定卫星数量为不大于2时,控制电路22执行第二判断程序,接续进行步骤s131。在一些实施例中,为计算车辆的3d位置(纬度、经度和高度)及移动状态,必须接收至少4颗卫星的卫星信号,故而数量阀值可以为4。
26.续参考图4。在步骤s12的一些实施例中,控制电路22根据卫星信号计算车载的车速(步骤s121),以及控制电路22根据车速选择性锁定车载的荧幕30(步骤s122)。在一些实施例中,步骤s121中第一判断程序包括控制电路22根据差分导航定位技术(differential gps)及卫星信号计算车载的车速,以获得更精确的车速。
27.在步骤s13的一些实施例中,控制电路22利用车载的惯性传感器23产生移动信号(步骤s131),以及控制电路22根据移动信号选择性锁定车载的荧幕30(步骤s132)。
28.在一些实施例中,步骤s10到步骤s13会反复执行,也就是重复实施车载荧幕的切换方法,以再次判定荧幕30是否锁定。举例而言,在执行完步骤s12及步骤s13之后接续回到执行步骤s10及后续步骤。或者,在执行完步骤s12及步骤s13之后,间隔一段持续时间后再
回到执行步骤s10及后续步骤。
29.图5是图4中步骤s122的示范例的细部流程图。参考图5,在一实施例中,控制电路22判断执行第一判断程序(步骤s112)之后,判断车速是否大于速度阀值(步骤s1220)。若是,也即当车速大于速度阀值时,控制电路22锁定车载的荧幕30(步骤s1221)。若否,也即当车速不大于速度阀值时,控制电路22不锁定车载的荧幕30(步骤s1222)。
30.在一些实施例中,在步骤s1221及步骤s1222之后回到步骤s100;也就是反复循环确认卫星信号的状态。在一些实施例中,在步骤s1221及步骤s1222之后,维持荧幕30于原状态下一持续时间,再回到步骤s100,也就是每隔一段持续时间确认一次卫星信号的状态。
31.图6是图4中步骤s131—132的示范例的细部流程图。参考图6,在一些实施例中,在步骤131还包括控制电路22从惯性传感器23接收第一轴加速值、第二轴加速值与第三轴加速值(步骤s1310)。在一些实施例中,惯性传感器23以三轴加速度计(accelerometer sensor)来实现。在一些实施例中,第一轴加速值及第二轴加速值是由x轴加速值、y轴加速值及z轴加速值其中任选二。在一些实施例中,第一轴加速值及第二轴加速值依车辆前进的方向及车辆上下的方向由x轴加速值、y轴加速值及z轴加速值其中任选二。
32.后续,控制电路22进行第一轴加速值的增益运算以得到第一运算值(步骤s1311)并且控制电路22进行第二轴加速值的增益运算以得到第二运算值(步骤s1312)。在一些实施例中,增益运算是指将第一轴加速值或第二轴加速值作出四倍以上的增益。在一些实施例中,增益运算是指将第一轴加速值或第二轴加速值乘以四。增益运算以更便利于后续的运算及操作上的设定。
33.接下来,控制电路22以第三轴加速值、第一运算值与第二运算值进行向量运算以得到移动信号(步骤s1313)。在一些实施例中,向量运算是指将第三轴加速值、第一运算值与第二运算值作向量的加总运算以得到移动信号。
34.在一示范例中,a代表第三轴加速值、b代表第一运算值与c代表第二运算值,可以通过将a的平方加上b的平方加上c的平方,再将其相加的总数开根号之后以得到移动信号,此处将移动信号标示为
35.因此其运算式如下:
[0036][0037]
接下来在步骤s1320中,控制电路22将移动信号与预设的震动阀值进行比较,当移动信号大于震动阀值时,控制电路22锁定车载的荧幕30(步骤s1321)。反过来,当移动信号不大于震动阀值时,控制电路22不锁定车载的荧幕30(步骤s1322)。在一些实施例中,震动阀值可以依需求进行调整。
[0038]
在一些实施例中,锁定车载的荧幕30是指停用荧幕30的触控功能、停用荧幕30的显示功能或显示荧幕30的某些预设显示画面的其中之一,或同时停用荧幕30的此些功能,以使荧幕30呈现锁定状态。而不锁定车载的荧幕30是指使荧幕30的各项功能(如触控功能、显示功能等)正常运作,以使荧幕30呈现正常状态。在一些实施例中,步骤s122、步骤s132、步骤s1222与步骤s1322的不锁定荧幕30可以是解除现行的荧幕30的锁定状态(即将荧幕30的运作状态从锁定状态切换为正常状态)、或维持现行的荧幕30的不锁定状态(即保持荧幕30的运作状态为正常状态)。在一些实施例中,步骤s1221、步骤s1321的锁定荧幕30可以是
将荧幕30的运作状态从正常状态切换为锁定状态直至后续周期判断到不锁定荧幕30为止、将荧幕30的运作状态从正常状态切换为锁定状态一段时间、或维持现行的荧幕30的锁定状态。
[0039]
在一些实施例中,控制电路22可通过中央处理器(central processing unit,cpu)、soc(system on a chip)晶片、微控制器(mcu、积体电路(ic,integrated circuit)、微处理器(microprocessor)等来实现,但本发明并非以此为限。
[0040]
在一些实施例中,运动状态值可以是加速度、倾斜、冲击、振动、旋转和多自由度(dof)运动的数值其中之一或数种。
[0041]
在一些实施例中,惯性传感器23由加速度计(accelerometer sensor)、陀螺仪(gyroscope)、光纤陀螺仪、激光陀螺仪、微电(emes)陀螺仪其中至少一来实现。
[0042]
需注意的是,虽然前述依序描述各步骤,但此顺序并非本发明的限制,熟习相关技艺者应可了解在合理情况下部分步骤的执行顺序可同时进行或先后对调。
[0043]
本发明的技术内容已以较佳实施例揭示如上述,然其并非用以限定本发明,任何熟习此技艺者,在不脱离本发明的精神所做些许的更动与润饰,皆应涵盖于本发明的范畴内,因此本发明的保护范围当视后附的申请专利范围所界定者为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

