基于5g通讯的超声波传感避障的物联网智能巡防机器人
技术领域
1.本发明涉及智能巡防机器人领域,具体来说,涉及基于5g通讯的超声波传感避障的物联网智能巡防机器人。
背景技术:
2.随着城市化的进程发展,城市的规模越来越大,公共场所如学校、火车站、汽车站、机场大厅、图书馆、科技馆和城市商业广场等重要区域的人群集聚量很大,紧急事故和非法刑事案件一旦发生或者即将发生时,如果不对现场进行预警和控制,后果不堪设想,因此在公共场所作为协助和辅助正常安保人员的安防机器人将会起到重要的作共场所使用的安防装置有监控摄像头、移动交巡警平台和人力安保人员,安防巡用。
3.目前城市公逻机器人比较少,随着无线通信技术和智能手机地不断发展,互联网与人们生活的联系更加紧密,设备通过与互联网连接加速了智能手机多功能化的发展。随着国家支持政策的不断明朗,智能机器人的应用范围已开始向国家安全防护领域拓展,操控复杂,智能化程度低,不能实现远程控制和自动控制功能也局限在监控和预警提示方面,这对于协助或者辅助安保人员的工作来说还远远不够。
4.cn201710414838.9,公布了一种基于物联网的安防机器人,系统处于自动模式时,机器人控制器通过处于前、后、左、右的4个光电传感器检测机器人周围是否有障碍,并控制机器人的移动路径,在公共场所实现连续的巡检;当系统处于手动模式时,通过操作手机界面上的方向控制键控制机器人的移动方向。针对可疑人员机器人的液晶显示模块会显示:请进行指纹验证,人员需将手指按在机器人的指纹识别模块上,识别结果会显示在上位机界面上,完成指纹安全验证工作。
5.通过派驻专门的安防人员去维护治安,但这种方式也存在着许多弊端:其一,无法及时发现安全隐患;其二,需要耗费大量的人力物力。鉴于此,再用人工智能算法对存储内容进行分析,从而实现服务的集成和信息化的技术,基于5g通讯技术的图像画面实时回传,在遇到需要人员操纵的情况下可以实时切换为人员操控,来完成更为复杂的动作和更为特殊的场景中。
技术实现要素:
6.针对相关技术中的问题,本发明提出基于5g通讯的超声波传感避障的物联网智能巡防机器人,以克服现有相关技术所存在的上述技术问题。
7.本发明的技术方案是这样实现的:
8.基于5g通讯的超声波传感避障的物联网智能巡防机器人,包括底盘、车轮以及底座,所述车轮分布在底盘的四端;
9.所述底座设置于底盘上,所述底座上设置有升降检测组件,所述底座内还安装有控制组件,升降检测组件的一端插入底座,所述升降检测组件的另一端穿出底座与检测头,所述控制组件与升降检测组件和检测头通过有线或者无线连接,所述控制组件用于发送或
者接收升降检测组件和检测头的信号。
10.进一步地,所述升降检测组件包括升降组件和旋转检测组件,所述旋转检测组件套在升降组件上。
11.进一步地,所述升降组件包括电机、蜗杆、左齿轮和右齿轮,所述电机置于底座内,所述蜗杆的一端与电机连接,所述蜗杆的另一端穿过旋转检测组件延伸至检测头的内部;
12.所述左齿轮和右齿轮对称设置在蜗杆的两侧,并且所述左齿轮和右齿轮与蜗杆啮合。
13.进一步地,所述旋转检测组件包括第一外壳、第二外壳、环体、齿圈、齿轮和从动轴,所述第一外壳和第二外壳之间卡入旋转的环体,所述第一外壳和第二外壳相对的侧面分别加工有第一环槽和第二环槽,所述齿圈固定在环体的内壁上;
14.所述从动轴的两端插入第二外壳的两侧轴承内,所述齿轮固定在从动轴上,并且所述齿轮与齿圈啮合;
15.所述第一环槽和第二环槽的轴承内分别插入左齿轮和右齿轮的轴,所述左齿轮和右齿轮的一部分位于第一外壳和第二外壳内,所述右齿轮和从动轴之间通过传动组件连接。
16.进一步地,所述传动组件包括第一锥齿轮、第二锥齿轮、第三锥齿轮、传动轴、限位套以及支撑架,第一锥齿轮固定在右齿轮的轴上,第二锥齿轮和第三锥齿轮固定在传动轴的两端上,限位套套在传动轴的中部,第二锥齿轮与第一锥齿轮啮合,第三锥齿轮与从动轴上的第四锥齿轮啮合,蜗杆旋转带动左齿轮和右齿轮旋转,通过传动组件带动从动轴旋转,齿轮带动齿圈和环体转动。
17.进一步地,所述第一外壳和第二外壳位于齿圈上方的相对壁上固定有挡杆,第一外壳和第二外壳的挡杆插入蜗杆的两侧,挡杆在蜗杆未旋转时,用于固定第一外壳和第二外壳防止下滑。
18.进一步地,所述环体的外周面沿径向方向固定不小于组的检测杆,并在检测杆的端口上嵌入超声波传感器。
19.进一步地,所述控制组件包括主控板、5g模块、路由模块、云模块、激光雷达、驱动模块和视觉模块,5g模块、路由模块、云模块、激光雷达和驱动模块和视觉模块锡焊在主控板上,主控板上的处理芯片输入端与超声波传感器、激光雷达和视觉模块连接,处理芯片的输出端与路由模块和驱动模块,路由模块的输出端接在5g模块上,5g模块上传至云模块。
20.进一步地,所述驱动模块分别与电机和车轮连接,视觉模块与检测头的摄像头通过导线电连接,摄像头拍摄的画面传输至处理芯片,配合超声波传感器实时检测周边环境,用于驱动电机和车轮运行避障,驱动机器人移动或者检测头升降旋转,扩大检测范围。
21.上述技术方案具有如下优点或者有益效果:
22.1、本发明提供了基于5g通讯的超声波传感避障的物联网智能巡防机器人,蜗杆的一端与电机连接,蜗杆的另一端穿过旋转检测组件延伸至检测头的内部,电机驱动蜗杆旋转;从动轴的两端插入第二外壳的两侧轴承内,齿轮固定在从动轴上,并且齿轮与齿圈啮合,齿轮旋转带动齿圈旋转;通过传动组件带动从动轴旋转,齿轮带动齿圈和环体转动,通过齿轮在旋转时能够带动环体旋转,则环体外侧的检测杆能够同步旋转,动态的进行检测,避免检测的死角,同时减少了检测杆的设置,降低了成本。
23.2、本发明提供了基于5g通讯的超声波传感避障的物联网智能巡防机器人,环体的外周面沿径向方向固定不小于1组的检测杆,并在检测杆的端口上嵌入超声波传感器,超声波传感器实时检测,驱动模块分别与电机和车轮连接,视觉模块与检测头的摄像头通过导线电连接,摄像头拍摄的画面传输至处理芯片,配合超声波传感器实时检测周边环境,控制组件用于驱动电机和车轮运行避障,以及驱动机器人移动或者升降旋转,扩大检测范围,通过超声波传感器和摄像头检测周面,激光雷达用于建立周边地图,并且通过云计算计算机器人周边环境,完成避障。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
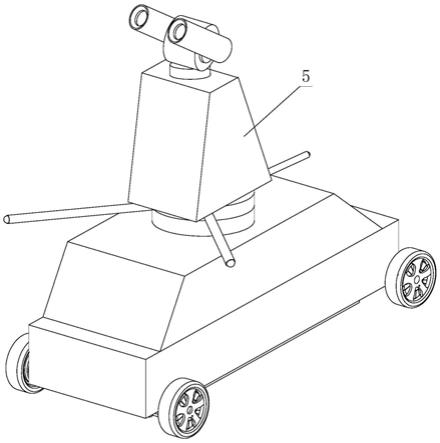
25.图1是根据本发明实施例的5g通讯的超声波传感避障的物联网智能巡防机器人的立体图;
26.图2是根据本发明实施例的5g通讯的超声波传感避障的物联网智能巡防机器人的分解图;
27.图3是根据本发明实施例的5g通讯的超声波传感避障的物联网智能巡防机器人的侧面图;
28.图4是根据本发明实施例的5g通讯的超声波传感避障的物联网智能巡防机器人的升降检测组件内部侧视图;
29.图5是根据本发明实施例的5g通讯的超声波传感避障的物联网智能巡防机器人的升降检测组件内部正视图;
30.图6是根据本发明实施例的5g通讯的超声波传感避障的物联网智能巡防机器人的系统图;
31.图7是根据本发明实施例的5g通讯的超声波传感避障的物联网智能巡防机器人的控制组件连接图。
32.图中:
33.1、底盘;2、车轮;3、底座;4、升降检测组件;41、升降组件;411、电机;412、蜗杆;413、左齿轮;414、右齿轮;42、旋转检测组件;421、第一外壳;422、第二外壳;423、环体;424、齿圈;425、齿轮;426、从动轴;5、检测头;6、控制组件;61、主控板;62、5g模块;63、路由模块;64、云模块;65、激光雷达;66、驱动模块;67、视觉模块;7、传动组件;71、第一锥齿轮;72、第二锥齿轮;73、第三锥齿轮;74、传动轴;75、限位套;76、支撑架;8、第四锥齿轮;9、挡杆。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
35.参阅附图1
‑
7所示基于5g通讯的超声波传感避障的物联网智能巡防机器人,包括底盘1、车轮2以及底座3,车轮2分布在底盘1的四端,车轮2受控于轮毂电机,用于驱动机器人移动和转向;
36.底座3设置于底盘1上,底座3上设置有升降检测组件4,底座3内还安装有控制组件6,升降检测组件4的一端插入底座3,升降检测组件4的另一端穿出底座3与检测头5,控制组件6与升降检测组件4和检测头5通过有线或者无线连接,控制组件6用于发送或者接收升降检测组件4和检测头5的信号。
37.升降检测组件4包括升降组件41和旋转检测组件42,旋转检测组件42套在升降组件41上。
38.升降组件41包括电机411、蜗杆412、左齿轮413和右齿轮414,电机411置于底座3内,蜗杆412的一端与电机411连接,蜗杆412的另一端穿过旋转检测组件42延伸至检测头5的内部,电机411驱动蜗杆412旋转;
39.左齿轮413和右齿轮414对称设置在蜗杆412的两侧,并且左齿轮413和右齿轮414与蜗杆412啮合,在蜗杆412旋转时,带动且左齿轮413和右齿轮414同步的旋转。
40.旋转检测组件42包括第一外壳421、第二外壳422、环体423、齿圈424、齿轮425和从动轴426,第一外壳421和第二外壳422之间卡入旋转的环体423,环体423可以绕第一外壳421和第二外壳422旋转的同时又能将第一外壳421和第二外壳422接在一起,第一外壳421和第二外壳422相对的侧面分别加工有第一环槽4211和第二环槽4222,齿圈424固定在环体423的内壁上;
41.从动轴426的两端插入第二外壳422的两侧轴承内,齿轮425固定在从动轴426上,并且齿轮425与齿圈424啮合,齿轮425旋转带动齿圈424旋转;
42.第一环槽4211和第二环槽4222的轴承内分别插入左齿轮413和右齿轮414的轴,左齿轮413和右齿轮414的一部分位于第一外壳421和第二外壳422内,右齿轮414和从动轴426之间通过传动组件7连接。
43.传动组件7包括第一锥齿轮71、第二锥齿轮72、第三锥齿轮73、传动轴74、限位套75以及支撑架76,第一锥齿轮71固定在右齿轮414的轴上,第二锥齿轮72和第三锥齿轮73固定在传动轴74的两端上,限位套75套在传动轴74的中部,第二锥齿轮72与第一锥齿轮71啮合,第三锥齿轮73与从动轴426上的第四锥齿轮8啮合,蜗杆412旋转带动左齿轮413和右齿轮414旋转,通过传动组件7带动从动轴426旋转,齿轮425带动齿圈424和环体423转动,通过齿轮425在旋转时能够带动环体423旋转,则环体423外侧的检测杆能够同步旋转,动态的进行检测,避免检测的死角,同时减少了检测杆的设置,降低了成本。
44.第一外壳421和第二外壳422位于齿圈424上方的相对壁上固定有挡杆9,第一外壳421和第二外壳422的挡杆9插入蜗杆412的两侧,挡杆9在蜗杆412未旋转时,用于固定第一外壳421和第二外壳422防止下滑,同时挡杆9在蜗杆412旋转时,又能带动第一外壳421和第二外壳422上升,从而提高其检测的高度扩大检测的范围。
45.环体423的外周面沿径向方向固定不小于1组的检测杆,并在检测杆的端口上嵌入超声波传感器,超声波传感器实时检测。
46.控制组件6包括主控板61、5g模块62、路由模块63、云模块64、激光雷达65、驱动模块66和视觉模块67,5g模块62、路由模块63、云模块64、激光雷达65和驱动模块66和视觉模
块67锡焊在主控板61上,主控板61上的处理芯片输入端与超声波传感器、激光雷达65和视觉模块67连接,处理芯片的输出端与路由模块63和驱动模块66,路由模块63的输出端接在5g模块62上,5g模块62上传和接收云模块64信号。
47.驱动模块66分别与电机411和车轮2连接,视觉模块67与检测头5的摄像头通过导线电连接,摄像头拍摄的画面传输至处理芯片,配合超声波传感器实时检测周边环境,控制组件6用于驱动电机411和车轮2运行避障,驱动机器人移动或者升降旋转,扩大检测范围,通过超声波传感器和摄像头检测周面,激光雷达65用于建立周边地图,并且通过5g的通信速率快,能够在云端计算后,反馈计算机器人周边环境,完成避障。
48.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

