1.本发明涉及一种深空探测彩色相机自恢复抗单粒子锁定系统及方法,属于深空探测领域。
背景技术:
2.彩色相机作为一个直观有效的数据采集来源,在各种宇航深空探测中具有较为广泛的应用,彩色相机探测器需选用彩色探测器,考虑单机尺寸、功耗、电路复杂度等因素,深空探测彩色相机选用彩色cmos探测器作为图像传感器进行光电转换。由于彩色cmos探测器抗单粒子能力较低,因此设计上需采用单粒子防护设计,从而保证相机在轨可靠性。
3.通常采用在供电回路中加入限流电阻或限流型ldo的方法进行锁定防护。然而,首先,在供电回路中加入限流电阻的方法只能用于工作电流不大的cmos集成器件,且彩色cmos探测器供电对电压波动较为敏感,无法采用限流电阻的方法。其次,限流型ldo由于限流值为单一值,而彩色cmos探测器在上电过程及工作过程电流波动较大,若采用单一阈值限流,很容易造成误判,导致保护电路误动。
技术实现要素:
4.本发明解决的技术问题是:针对目前现有技术中,传统技术容易走阿城相机保护电路误动、相机上电过程波动较大的问题,提出了一种深空探测彩色相机自恢复抗单粒子锁定系统及方法。
5.本发明解决上述技术问题是通过如下技术方案予以实现的:
6.一种深空探测彩色相机自恢复抗单粒子锁定系统,dc
‑
dc电压转换模块、锁定限流器、限流型ldo、彩色cmos探测器、fpga、接口电路,其中:
7.dc
‑
dc电压转换模块:通过外部电源进行供电,对外部电源电压进行转换,并为锁定限流器供电;
8.锁定限流器:对dc
‑
dc电压转换模块输送的电压进行限流,为彩色cmos探测器进行两路供电,并由fpga控制;当彩色cmos探测器出现过流现象时,锁定限流器出现过流状态标志,并发送至fpga;当彩色cmos探测器无过流现象时,为彩色cmos探测器进行正常供电;
9.限流型ldo:为彩色cmos探测器进行敏感供电部分供电,判断彩色cmos探测器是否出现过流现象,若出现过流现象,则向fpga发送过流状态标志;
10.彩色cmos探测器:侦测两路供电是否出现过流现象,若出现过流现象则通过锁定限流器、限流型ldo分别向fpga发送过流状态标志;
11.fpga:通过控制字对锁定限流器进行控制,若接收到过流状态标识,根据所得过流状态标识向锁定限流器发送控制字进行关闭,将过流状态参数以遥测信号形式通过接口电路向外输出。
12.所述彩色cmos探测器的两路供电具体为:
13.为彩色cmos探测器进行与锁定限流器相同电压供电、彩色cmos探测器敏感供电部
分供电。
14.所述控制字为2bit,包括11、10、01、00,分别对应锁定限流器打开/高阈值、锁定限流器打开/低阈值、锁定限流器关闭/高阈值、锁定限流器关闭/低阈值。
15.所述限流型ldo状态包括:0
‑
正常运行、1
‑
过流状态。
16.一种深空探测彩色相机自恢复抗单粒子锁定方法,步骤如下:
17.(1)通过外部电源控制加电;
18.(2)进行初始化及上电复位;
19.(3)将锁定限流器控制字置为11,锁定限流器为锁定限流器打开/高阈值;
20.(4)为彩色cmos探测器上电;
21.(5)将锁定限流器控制字置为10,锁定限流器为锁定限流器打开/低阈值;
22.(6)通过fpga接收到的过流状态标志确定限流型ldo限流状态是否为1,若由0至1变化,则将锁定限流器控制字置为00,同时将系统遥测状态置为过流状态,若限流型ldo限流状态为0则返回步骤(2)重新进行初始化及上电复位;
23.(7)通过fpga接收到的过流状态标志确定锁定限流器状态是否为1,若由0至1变化,则将锁定限流器控制字置为00,同时将系统遥测状态置为过流状态,若限流型ldo限流状态为0则正常运行。
24.所述初始化及上电复位时间为200ms。
25.所述彩色cmos探测器上电时间为20ms。
26.本发明与现有技术相比的优点在于:
27.本发明提供的一种深空探测彩色相机自恢复抗单粒子锁定系统及方法,针对彩色cmos探测器进行锁定防护的阈值进行阈值档位分时划分,从而解决了现有方法防护阈值难以和被保护器件的锁定电流匹配的问题,避免出现不能使被保护器件脱离锁定状态或者出现锁定误判的情况,解决了现有技术中多为采用单一阈值进行锁定判断的问题,同时针对彩色cmos探测器电路锁定敏感供电部分,设置单独限流型ldo,进行多级限流判断,从而保证系统可靠性。
附图说明
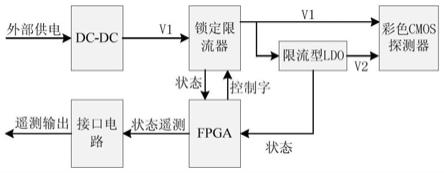
28.图1为发明提供的相机自恢复抗单粒子锁定系统示意图;
29.图2为发明提供的相机自恢复抗单粒子锁定波形示意图;
30.图3为发明提供的相机自恢复单粒子锁定流程示意图;
具体实施方式
31.一种深空探测彩色相机自恢复抗单粒子锁定系统及方法,针对彩色cmos探测器上电过程及工作过程分段设置限流阈值,同时针对彩色cmos探测器单粒子锁定敏感的供电部分设置单独限流型ldo,进行多级限流判断,从而保证系统可靠性。
32.深空探测彩色相机自恢复抗单粒子锁定系统主要包括:
33.dc
‑
dc电压转换模块、锁定限流器、限流型ldo、彩色cmos探测器、fpga、接口电路,其中:
34.dc
‑
dc电压转换模块:通过外部电源进行供电,对外部电源电压进行转换,并为锁
定限流器供电;
35.锁定限流器:对dc
‑
dc电压转换模块输送的电压进行限流,为彩色cmos探测器进行两路供电,并由fpga控制;当彩色cmos探测器出现过流现象时,锁定限流器出现过流状态标志,并发送至fpga;当彩色cmos探测器无过流现象时,为彩色cmos探测器进行正常供电;
36.限流型ldo:为彩色cmos探测器进行敏感供电部分供电,判断彩色cmos探测器是否出现过流现象,若出现过流现象,则向fpga发送过流状态标志;
37.限流型ldo状态包括:0
‑
正常运行、1
‑
过流状态;
38.彩色cmos探测器:侦测两路供电是否出现过流现象,若出现过流现象则通过锁定限流器、限流型ldo分别向fpga发送过流状态标志;
39.其中,彩色cmos探测器采用两路供电,分别为与锁定限流器相同电压供电,以及彩色cmos探测器敏感供电部分单独供电;
40.fpga:通过控制字对锁定限流器进行控制,若接收到过流状态标识,根据所得过流状态标识向锁定限流器发送控制字进行关闭,将过流状态参数以遥测信号形式通过接口电路向外输出;
41.其中,控制字为2bit,包括11、10、01、00,分别对应锁定限流器打开/高阈值、锁定限流器打开/低阈值、锁定限流器关闭/高阈值、锁定限流器关闭/低阈值;
42.根据上述的深空探测彩色相机自恢复抗单粒子锁定系统,提出一种深空探测彩色相机自恢复抗单粒子锁定方法,具体步骤如下:
43.(1)通过外部电源控制加电;
44.(2)进行初始化及上电复位;
45.初始化及上电复位时间为200ms;
46.(3)将锁定限流器控制字置为11,锁定限流器为锁定限流器打开/高阈值;
47.(4)为彩色cmos探测器上电;
48.彩色cmos探测器上电时间为20ms;
49.(5)将锁定限流器控制字置为10,锁定限流器为锁定限流器打开/低阈值;
50.(6)通过fpga接收到的过流状态标志确定限流型ldo限流状态是否为1,若由0至1变化,则将锁定限流器控制字置为00,同时将系统遥测状态置为过流状态,若限流型ldo限流状态为0则返回步骤(2)重新进行初始化及上电复位;
51.(7)通过fpga接收到的过流状态标志确定锁定限流器状态是否为1,若由0至1变化,则将锁定限流器控制字置为00,同时将系统遥测状态置为过流状态,若限流型ldo限流状态为0则正常运行。
52.下面结合具体实施例进行进一步说明:
53.在本实施例中,深空探测彩色相机自恢复抗单粒子锁定系统如1图所示,内部供电转换采用高效率dc
‑
dc实现,彩色cmos探测器电路锁定敏感供电部分采用低噪声限流型ldo实现。
54.锁定限流器由fpga控制限流阈值,控制字2bit,其中高位控制限流器开关,低位控制限流阈值,即11为限流器开,高阈值;10为11为限流器开,低阈值,01及00均为限流器关。
55.限流型ldo正常状态为0,发生过流后状态由0变为1;
56.锁定限流器正常状态为0,发生过流后状态由0变为1;
57.相机状态遥测的正常状态为0,发生过流后状态由0变为1。
58.如图3所示,为相机自恢复单粒子锁定流程,具体流程为:
59.(1)相机加电,相机由外部供电控制加电;
60.(2)等待200ms,此过程为相机内部初始化及上电复位过程;
61.(3)限流器控制字置为11,此时为限流器开,高阈值:
62.(4)等待20ms,此过程为彩色cmos探测器上电过程;
63.(5)限流器控制字置为10,此时为限流器低,高阈值:
64.(6)fpga实时判断限流型ldo限流状态是否为1,检测到0变为1将限流器控制字置为00,同时将相机状态遥测置为1,限流型ldo限流状态为0则fpga进行下一步判断;
65.(7)fpga实时判断限流器限流状态是否为1,检测到0变为1将限流器控制字置为00,同时将相机状态遥测置为1,限流器限流状态为0则将相机状态遥测置为0;
66.(8)在步骤(6)、步骤(7)中,若限流器控制字置为00后,返回步骤(2),重新进行锁定流程。
67.其中,相机自恢复抗单粒子锁定波形示意图如图2所示,在t0时刻执行上述步骤(3),在t1时刻执行上述步骤(5),在t2时刻,发生上述步骤(6)或步骤(7),在t3时刻,重新开始执行上述步骤(3)。
68.以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
69.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

