1.本发明涉及舵机故障排除技术领域,特别涉及一种飞机舵面故障容错控制系统和方法。
背景技术:
2.飞机在现代运输行业中的地位举足轻重,和其他运输方式相比,飞机运输对安全性的要求更高,特别是对客运而言,一旦出现安全问题就有可能出现灾难性的事故。飞机控制系统中的执行机构,如方向舵、襟翼、发动机等都是可能发生故障的部位,设计合适的容错机制对于避免事故的发生具有重要意义。现有的控制方法只能保证系统的稳定性,而且多采用pid控制,需要对系统进行线性处理。故障检测多采用表决等方法,多个舵机同时工作,相互比较以排除故障。
3.现有控制方法难以保证系统的动态特性,对于飞机飞行的舒适性等性能有很大影响。故障检测方法,如表决方法,需要多个设备同时工作并监控输出,可能存在竞争问题,影响到飞行安全。此外现有控制方法与故障检测方法通常是相互分离的,需要两套独立的模块,增加了成本。
技术实现要素:
4.本发明针对现有技术的缺陷,提供了一种飞机舵面故障容错控制系统和方法,能够准确控制飞机姿态角、约束动态特性,并基于动态特性检测、排除舵机故障。
5.为了实现以上发明目的,本发明采取的技术方案如下:
6.一种飞机舵面故障容错控制系统包括:舵机控制器和故障监控器。
7.舵机控制器采集获取飞机的飞机飞行速度、攻角、俯仰角、俯仰角速度、纵向推力以及垂直向推力,获取参考俯仰角信号,获取预设性能指标函数;
8.舵机控制器根据飞机俯仰角和参考俯仰角信号确定跟踪误差;
9.舵机控制器包括:虚拟控制模块和控制信号模块;
10.虚拟控制模块根据跟踪误差、转换误差变量以及参考俯仰角信号确定虚拟控制律;
11.控制信号模块根据跟踪误差、转换误差变量、参考俯仰角信号以及虚拟控制律确定舵机控制律并控制舵机的转动角度;
12.故障监控器用于根据预设性能指标函数以及虚拟控制律确定监控函数;根据监控函数判断是否发生故障,
13.若发生故障则关闭当前故障舵机,接入备用舵机,若没有故障出现则继续监控;发生故障后,根据舵机接入时间以及预设的故障恢复时间,向舵机控制器发送修正指令,确保飞机姿态角恢复预设性能要求。
14.本发明还公开了一种飞机舵面故障容错控制方法,包括如下步骤:
15.s1.利用公式z1=x3‑
y
r
确定跟踪误差;
16.s2.获取预设性能指标函数p(t),p(t)=(p0‑
p
∞
)e
‑
at
p
∞
。p(t)的初始值为p0,终值趋近于p
∞
的严格单调递减函数,p0和p
∞
分别为初始时刻误差指标参数与稳态误差指标参数,且p0>p
∞
>0,e为自然常数,a>0为指标收敛参数,p0、p
∞
和a均为根据实际需求设计选定的参数。t为时间。
17.s3.虚拟控制模块根据跟踪误差以及参考俯仰角信号确定虚拟控制律。利用公式确定虚拟控制律。其中,α1为虚拟控制律,c1>0为调节参数,z1为跟踪误差,y
r
为已知参考角度轨迹,为已知参考角度轨迹对时间微分,x3为飞机俯仰角,为状态系数估计值。
18.s4.控制信号模块根据跟踪误差、转换误差变量、参考俯仰角信号以及虚拟控制律确定舵机控制律并控制舵机的转动角度;根据公式确定舵机转动角度。其中,u为舵机角度,c2为调节参数,z2为俯仰角速度与虚拟控制律的误差,z2=x4‑
α1,k
b2
为z2的性能边界常数,λ1、λ2、ζ1以及ζ2为误差限制整定项,误差限制整定项,β1为输出跟踪整合项,υ2为回归系数整合项,,其中f
21
、f
22
为回归系数调节参数。
19.s5.故障监控器用于根据预设性能指标函数以及虚拟控制律确定监控函数;根据监控函数判断是否发生故障,若发生故障则关闭当前故障舵机,接入备用舵机,若没有故障出现则继续监控。
20.故障监控函数为m1=γp和m2=γk
b2
。其中,γ为监控函数修正系数,μ为初始条件外界数。当|z1|=m1或者|z2|=m2时,则说明发生故障,故障监控器发出指令关闭当前故障舵机,接入备用舵机;若没有故障出现则继续监控。
21.s6.监测到故障后,故障监控器根据舵机接入时间t
d
以及设计好的故障恢复时间t
r
,向舵机控制器发送控制修正系数以及修正舵机控制器的控制信号直至恢复时间结束。其中∈1和∈2为设计参数,t
s
为调节时间,t
s
=t
r
‑
t
d
,t
r
为检测到故障的时间点。
22.与现有技术相比,本发明的优点在于:
23.能够对飞机的舵面角度、飞行状态进行跟踪控制,并保证跟踪效果的动态特性;通过故障监控器,基于预设性能指标函数和飞机飞行状态监控舵机是否发生故障,同时对控
制器进行修正,无须检测舵机状态,且实现了控制、故障监控一体化,提高了控制效果,节约了成本,具有较高的使用价值。
附图说明
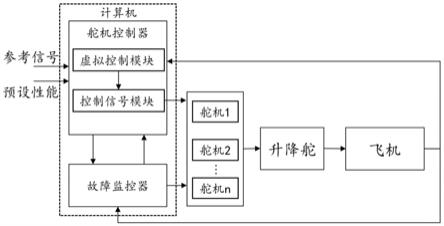
24.图1是本发明实施例机舵面故障容错控制系统结构框图。
25.图2是本发明实施例仿真控制效果图。
具体实施方式
26.为使本发明的目的、技术方案及优点更加清楚明白,以下根据附图并列举实施例,对本发明做进一步详细说明。
27.如图1所示,一种飞机舵面故障容错控制系统包括:舵机控制器和故障监控器。
28.舵机控制器采集获取飞机的飞机飞行速度、攻角、俯仰角、俯仰角速度、纵向推力以及垂直向推力,获取参考俯仰角信号,获取预设性能指标函数;
29.舵机控制器根据飞机俯仰角和参考俯仰角信号确定跟踪误差;
30.舵机控制器包括:虚拟控制模块和控制信号模块;
31.虚拟控制模块根据跟踪误差、转换误差变量以及参考俯仰角信号确定虚拟控制律;
32.控制信号模块根据跟踪误差、转换误差变量、参考俯仰角信号以及虚拟控制律确定舵机控制律并控制舵机的转动角度;
33.故障监控器用于根据预设性能指标函数以及虚拟控制律确定监控函数;根据监控函数判断是否发生故障,
34.若发生故障则关闭当前故障舵机,接入备用舵机,若没有故障出现则继续监控;发生故障后,根据舵机接入时间以及预设的故障恢复时间,向舵机控制器发送修正指令,确保飞机姿态角恢复预设性能要求。
35.飞机在横轴上的动力学方程可由方程(1)表示,式中v为飞机飞行速度,α为攻角,β为俯仰角,q为俯仰角速度,以上变量可通过传感器采集测量得到;为飞行加速度,为攻角速度,为俯仰角加速度,为俯仰角速度,不需要测量,仅作示意;m为飞机质量,i
y
为横轴转动惯量,以上为常量,保持不变,起飞前可确定大小。f
x
为飞机纵轴受力,f
z
为飞机垂直轴受力,m为俯仰力矩,以上变量可由其他变量表示,如方程(2)所示。
36.[0037][0038]
方程(2)中s为机翼面积,ρ为空气密度,g为重力加速度,以上为已知常量;t
x
为纵向推力,t
z
为垂直向推力,可以通过测量得到;为动压;δ为升降舵角度,为控制输入量;c
x1
~c
x4
、c
z1
~c
z5
和c
m1
~c
m5
为已知的常量系数。为方便表示,记输入量即升降舵角度u=δ,记状态变量为x=[x1,x2,x3,x4]
t
=[v,α,β,q]
t
。考虑控制飞机的俯仰角,则方程(1)可以化简为状态方程
[0039][0040]
式中θ为未知常向量系数、θ1为已知常数。
[0041]
y
r
为设置好的已知参考角度轨迹,和分别为已知参考角度轨迹的一次和二次时间导数。
[0042]
一种飞机舵面故障容错控制方法,包括如下步骤:
[0043]
s7.利用公式z1=x3‑
y
r
确定跟踪误差;
[0044]
s8.获取预设性能指标函数p(t),p(t)=(p0‑
p
∞
)e
‑
at
p
∞
。p(t)的初始值为p0,终值趋近于p
∞
的严格单调递减函数,p0和p
∞
分别为初始时刻误差指标参数与稳态误差指标参数,且p0>p
∞
>0,e为自然常数,a>0为指标收敛参数,p0、p
∞
和a均为根据实际需求设计选定的参数。t为时间。
[0045]
s9.虚拟控制模块根据跟踪误差以及参考俯仰角信号确定虚拟控制律。利用公式确定虚拟控制律。其中,α1为虚拟控制律,c1>0为调节参数,z1为跟踪误差,y
r
为已知参考角度轨迹,为已知参考角度轨迹对时间微分,x3为飞机俯仰角,为状态系数估计值。
[0046]
s10.控制信号模块根据跟踪误差、转换误差变量、参考俯仰角信号以及虚拟控制律确定舵机控制律并控制舵机的转动角度;根据公式确定舵机转动角度。其中,u为舵机角度,c2为调节参数,z2为俯仰角速度与虚拟控制律的误差,z2=x4‑
α1,k
b2
为z2的性能边界常数,λ1、λ2、ζ1以及ζ2为误差限制整定项,
β1为输出跟踪整合项,υ2为回归系数整合项,其中f
21
、f
22
为回归系数调节参数。
[0047]
s11.故障监控器用于根据预设性能指标函数以及虚拟控制律确定监控函数;根据监控函数判断是否发生故障,若发生故障则关闭当前故障舵机,接入备用舵机,若没有故障出现则继续监控。
[0048]
故障监控函数为m1=γp和m2=γk
b2
。其中,γ为监控函数修正系数,μ为初始条件外界数。当|z1|=m1或者|z2|=m2时,则说明发生故障,故障监控器发出指令关闭当前故障舵机,接入备用舵机;若没有故障出现则继续监控。
[0049]
s12.监测到故障后,故障监控器根据舵机接入时间t
d
以及设计好的故障恢复时间t
r
,向舵机控制器发送控制修正系数以及修正舵机控制器的控制信号直至恢复时间结束。其中∈1和∈2为设计参数,t
s
为调节时间,t
s
=t
r
‑
t
d
,t
r
为检测到故障的时间点。
[0050]
为了证明本发明的有益效果,选定预设性能指标函数的参数为a=0.1,p0=0.6,p
∞
=0.1,设置预设性能指标函数为p(t)=0.5e
‑
0.1t
0.1;
[0051]
选定虚拟控制律调节参数c1=1,设置虚拟控制律为
[0052][0053]
选定调节参数c2=f
21
=f
22
=1,设置舵机控制律为
[0054][0055]
选定设计参数∈1=0.05,∈2=0.1,舵机接入时间t
d
=2s,故障恢复时间t
r
=5s,设置修正系数为和
[0056]
如图2所示,舵机控制器开始工作后,俯仰角与参考角度轨迹的跟踪误差保持在预设性能指标内;舵机在第10秒时发生故障,跟踪误差开始失去控制,在第10.6秒时触发故障监控函数,故障监控器发出指令关闭当前故障舵机,接入备用舵机,经过2秒的舵机接入时间后,在第12.6秒,故障监控器向舵机控制器发送控制修正系数φ1和φ2,跟踪误差开始重新回到预设性能指标内。由仿真控制效果图可以看出本发明既能保证跟踪误差被约束在预设性能指标内,又能及时监控并排除舵机故障,恢复控制效果。
[0057]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的实施方法,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领
域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

