1.本实用新型涉及步进电机运动控制技术领域,尤其是一种闭环步进电机驱控一体板卡。
背景技术:
2.步进电机,专门用于速度和位置精确控制的特种电机,它旋转是以固定的角度(称为步距角)一步一步运行的,是将电脉冲信号转变为角位移或线位移的开环控制电机,我们可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时我们还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达调速的目的。
3.随着技术的逐渐成熟与自动化设备的日益小型化,控制卡加驱动器来控制电机的方式已经满足不了小型且安装简单的需求,运动部件越来越多。
技术实现要素:
4.为了解决上述的问题,本实用新型提供了一种闭环步进电机驱控一体板卡。
5.为了实现以上目的,本实用新型是通过如下技术方案来实现:
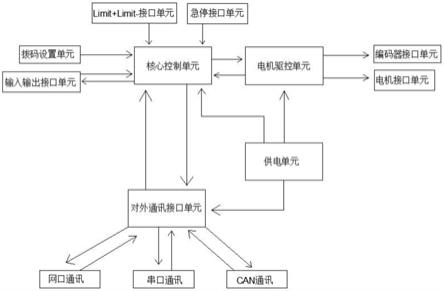
6.一种闭环步进电机驱控一体板卡,包括mcu板和io板,以及设置在所述mcu板和所述io板上的供电单元、核心控制单元、电机驱控单元、对外通讯接口单元、电机接口单元、输入输出接口单元、拨码设置单元、编码器接口单元、limit limit
‑
接口单元、急停接口单元;所述核心控制单元分别与所述电机驱控单元、所述对外通讯接口单元、所述输入输出接口单元、所述拨码设置单元、所述limit limit
‑
接口单元、所述急停接口单元相连接;所述电机驱控单元通过接收所述核心控制单元的驱控指令输出控制信号到所述电机接口单元进而控制步进电机,所述步进电机通过所述编码器接口单元将编码器信号反馈给所述电机驱控单元,形成闭环控制系统。
7.进一步的,所述核心控制单元和所述对外通讯接口单元设置在所述mcu板的正面;其中,所述核心控制单元包括mcu控制芯片;所述对外通讯接口单元可通过网口通讯接口或者串口通讯接口或者can通讯接口与pc端通讯,并且从pc端获取信号;对工业控制提供多种可行性方案,减小工业控制过程中的成本。
8.更进一步的,所述mcu控制芯片为stm公司的stm32芯片;用于整体开环步进电机驱控一体板卡的控制中心,既满足需求,价格又合理。
9.更进一步的,所述can通讯接口有两个,两个所述can通讯接口按照can协议连接同一总线;需要多个板卡一起使用时,可以将一个can通讯接口接到总线上,另一个can通讯接口接到下一块的板卡上;使用总线连接方式,简化布线方式,从而大大地减少布线。
10.进一步的,所述供电单元、所述电机接口单元、所述拨码设置单元、所述编码器接口单元、所述limit limit
‑
接口单元、所述输入输出接口单元、所述急停接口单元设置在所述io板的正面;其中,所述供电单元包括供电接口;所述电机接口单元包括电机接口,所述电机接口包括m1电机接口和m2电机接口;所述拨码设置单元包括细分数拨码以及电流拨
码;所述的编码器接口单元包括编码器输入接口,所述编码器输入接口包括m1电机的编码器输入接口和m2电机的编码器输入接口;所述limit limit
‑
接口单元包括m1电机以及m2电机的正限位接口和负限位接口;所述输入输出接口单元包括输出接口以及输入接口;所述急停接口单元包括急停接口。
11.更进一步的,所述电机接口的m1电机的驱动线与m2电机的驱动线分别对插相应的所述步进电机的接口,所述步进电机的编码器线分别对接相应的所述m1电机的编码器输入接口和所述m2电机的编码器输入接口;所述拨码设置单元与所述mcu控制芯片连接,所述细分数拨码用于设置电机的运行精度,所述电流拨码用于设置电机的运行电流和停止电流;所述步进电机的正限位线和负限位线分别对接相应的所述m1电机和所述m2电机的正限位接口以及所述m1电机和所述m2电机的负限位接口。
12.更进一步的,所述急停接口的引出线接硬件,其硬件可为急停开关,其接口为1、3脚,输入的高电平为24v,低电平为0v;所述输入接口的引出线接传感器,其接口为1、3脚,输入的高电平为24v,低电平为0v;所述输出接口的引出线接需要控制的器件,其器件可为指示灯或电磁阀,输出的高电平为24v,低电平为0v。
13.进一步的,所述电机驱控单元设置在所述io板的反面,其采用trinamic公司的tmc5160芯片;通过所述tmc5160芯片为其提供精准的电机驱动算法,以及运用先进的foc电机驱动方式,使所述步进电机的力矩方向与所述步进电机的转动相切,可以保证所述步进电机运行过程中的力矩是恒定的,以及是最大的,避免了常用的驱动器出现力矩不够,丢步等问题。
14.进一步的,所述io板的反面叠加在所述mcu板的正面上,且所述mcu板和所述io板通过排针、排母进行连接,从而进行信号传输;以叠加的方式连接所述mcu板和所述io板,减小其水平上的空间,满足工业自动化机台不断小型化的需求。
15.进一步的,所述mcu板和所述io板都为形状尺寸相同的正方形板,其厚度为3毫米,边长为65毫米;连接起来的所述mcu板和所述io板小巧,满足工业自动化机台不断小型化的需求。
16.本实用新型的有益效果是:与传统的控制方式相比,一体板卡可以节约一个驱动器的安装空间,从走线上以及控制上,可以大大节约成本以及节省空间;
17.使用特定的运动模式,保证步进电机在运动过程中的力矩稳定且为最大,屏蔽了传统的的控制方式力矩不稳定情况,大大提高电机的定位精度;
18.核心控制单元的stm32芯片信号直接到电机驱控单元的tmc5160芯片中,减少线的连接,增强抗干扰能力。
附图说明
19.图1所示为本实用新型实施例的系统总框图;
20.图2所示为本实用新型实施例的io板结构图;
21.图3所示为本实用新型实施例的mcu板结构图;
22.图4所示为本实用新型实施例的核心控制单元原理图;
23.图5所示为本实用新型实施例的电机驱控单元原理图;
24.图6所示为本实用新型实施例的网口通讯协议图;
25.图中:101、急停接口;102、输出接口;103、输入接口;104、编码器输入接口;105、负限位接口;106、电机接口;107、细分数拨码;108、电流拨码;109、供电接口;110、正限位接口;201、网口通讯接口;202、串口通讯接口;203、can通讯接口;204、mcu控制芯片。
具体实施方式
26.下面结合附图,对本实用新型做详细描述:
27.如图1
‑
6所示,一种闭环步进电机驱控一体板卡,包括mcu板和io板,以及设置在mcu板和io板上的供电单元、核心控制单元、电机驱控单元、对外通讯接口单元、电机接口单元、输入输出接口单元、拨码设置单元、编码器接口单元、limit limit
‑
接口单元、急停接口单元;核心控制单元分别与电机驱控单元、对外通讯接口单元、输入输出接口单元、拨码设置单元、limit limit
‑
接口单元、急停接口单元相连接;电机驱控单元通过接收核心控制单元的驱控指令输出控制信号到电机接口单元进而控制步进电机,步进电机通过编码器接口单元将编码器信号反馈给电机驱控单元,形成闭环控制系统。
28.核心控制单元和对外通讯接口单元设置在mcu板的正面;其中,核心控制单元包括mcu控制芯片204;对外通讯接口单元可通过网口通讯接口201或者串口通讯接口202或者can通讯接口203与pc端通讯,并且从pc端获取信号;对工业控制提供多种可行性方案,减小工业控制过程中的成本。
29.mcu控制芯片204为stm公司的stm32芯片;用于整体开环步进电机驱控一体板卡的控制中心,既满足需求,价格又合理。
30.can通讯接口203有两个,两个can通讯接口203按照can协议连接同一总线;需要多个板卡一起使用时,可以将一个can通讯接口203接到总线上,另一个can通讯接口203接到下一块的板卡上;使用总线连接方式,简化布线方式,从而大大地减少布线。
31.供电单元、电机接口单元、拨码设置单元、编码器接口单元、limit limit
‑
接口单元、输入输出接口单元、急停接口101单元设置在io板的正面;其中,供电单元包括供电接口109;电机接口单元包括电机接口106,电机接口106包括m1电机接口和m2电机接口;拨码设置单元包括细分数拨码107以及电流拨码108;的编码器接口单元包括编码器输入接口104,编码器输入接口104包括m1电机的编码器输入接口和m2电机的编码器输入接口;limit limit
‑
接口单元包括m1电机以及m2电机的正限位接口110和负限位接口105;输入输出接口单元包括输出接口102以及输入接口103;急停接口单元包括急停接口101。
32.电机接口106的m1电机的驱动线与m2电机的驱动线分别对插相应的步进电机的接口,步进电机的编码器线分别对接相应的m1电机的编码器输入接口和m2电机的编码器输入接口;拨码设置单元与mcu控制芯片连接,细分数拨码用于设置电机的运行精度,电流拨码用于设置电机的运行电流和停止电流;步进电机的正限位线和负限位线分别对接相应的m1电机和m2电机的正限位接口110以及m1电机和m2电机的负限位接口105。
33.急停接口101的引出线接硬件,其硬件可为急停开关,其接口为1、3脚,输入的高电平为24v,低电平为0v;输入接口103的引出线接传感器,其接口为1、3脚,输入的高电平为24v,低电平为0v;输出接口102的引出线接需要控制的器件,其器件可为指示灯或电磁阀,输出的高电平为24v,低电平为0v。
34.电机驱控单元设置在io板的反面,其采用trinamic公司的tmc5160芯片;通过
tmc5160芯片为其提供精准的电机驱动算法,以及运用先进的foc电机驱动方式,使步进电机的力矩方向与步进电机的转动相切,可以保证步进电机运行过程中的力矩是恒定的,以及是最大的,避免了常用的驱动器出现力矩不够,丢步等问题。
35.io板的反面叠加在mcu板的正面上,且mcu板和io板通过排针、排母进行连接,从而进行信号传输;以叠加的方式连接mcu板和io板,减小其水平上的空间,满足工业自动化机台不断小型化的需求。
36.mcu板和io板都为形状尺寸相同的正方形板,其厚度为3毫米,边长为65毫米;连接起来的mcu板和io板小巧,满足工业自动化机台不断小型化的需求。
37.本实用新型的工作原理为:
38.如图1
‑
6所示,电机接口106用来接步进电机的a a
‑
、b b
‑
相线,limit 、limit
‑
接对应步进电机通道的限位,步进电机的急停按钮的急停的输入端口(in1)接急停接口101,如果使用闭环控制,编码器输入接口104接上通讯端口,可选择网口通讯接口201、串口通讯接口202或can通讯接口203进行通讯控制,最后接上供电接口109,便可以构成控制;其中,网口通讯接口201的通讯协议为udp协议,以及默认ip地址为:192.168.5.140,端口号为:2017;串口通讯接口202的默认配置为波特率115200,8位数据位,1位停止位,无校验位;
39.核心控制单元通过外部通讯接口单元对接收的通讯指令进行解析后,根据指令对步进电机进行相应的控制;
40.本实施例的闭环步进电机驱控一体板卡使用模式如下:
41.绝对位置运动模式,板卡提供了两种回零模式,第一种为正限位回零,第二种为负限位回零,通过这两种模式可以对零点进行确定,在绝对位置控制中有两种情况,第一种就是没有编码器接入,绝对位置控制利用tmc5160提供实时反馈的微步数进行精准定位功能,第二种模式即有编码器接入,绝对位置控制便通过编码器的实时反馈对电机位置进行精准定位,从而达到精准控制的,在第二种控制过程中,必须将电机的细分数设置为大于等于64,才可以通过pi调节,在高精度运用场景下可以使用此控制模式。
42.相对运动模式,相对运动模式的情况,电机根据当前位置为零点的进行偏移,最小单位以256*200微步为一圈,通过精确的齿轮比既可以计算出电机的运动距离。
43.在闭环步进电机驱控一体板卡的使用过程中,按照实际使用情况,选择特定的运动模式,从而实现工业控制的小型化,并且节约大量成本。
44.以上仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书及附图内容所作的等效结构变换,直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

