1.本发明涉及一种根据权利要求1的前序部分所述的容器处理设备,一种根据权利要求13的前序部分所述的容器承载件以及一种根据权利要求14的前序部分所述的用于灌装容器的方法。
背景技术:
2.将容器以填料灌装的容器处理设备是公知的。在灌装容器时特别重要的是,所述容器持续地以预给定的量的填料被灌装。为此由现有技术公知了不同的方法,要注入到容器中的填料量特别是可以通过其重量或者其质量来确定。在此,填料应该特别是理解为液态的或膏状的填料、例如饮料、奶产品、调味汁等。此外然而填料也应该理解为颗粒的、松散的和很大程度上干燥的填料、例如干汤料、咖啡粉、烘焙添加剂和类似产品。容器理解为呈所有可考虑的形式和材料(玻璃、金属、塑料)的包装、特别是呈罐子、瓶子、吸嘴瓶、管、纸盒包装或杯形式的容器,所述容器必要时对于消费者密封、焊接或者持久地或短暂地以元件(罩、盖、薄膜等)封闭或覆盖。容器同样也应该理解为填料的袋包装或薄膜包装,所述袋包装或薄膜包装例如也称为小袋(pouch)。
3.出版物wo 2013/083209 a1例如描述了一种用于以填料灌装容器的灌装机。所述灌装机具有多个构造在旋转的输送元件上的灌装位置,所述灌装位置分别具有用于将填料受控地输出到容器中的灌装元件。此外,灌装机具有构造为容器承载件的功能元件,所述功能元件布置在对于所有灌装位置共同的承载件。此外,容器承载件配备有固定在共同的承载件上的称重单元用于控制量地灌装容器。
4.所述解决方案的缺点是所述称重单元的相对大的空间需求。
技术实现要素:
5.由此出发,本发明的任务在于,提供一种改进的容器处理设备、一种改进的容器承载件和一种改进的用于灌装容器的方法,所述容器处理设备、所述容器承载件和所述方法特别是具有减小的空间需求。
6.该任务通过一种根据独立权利要求1的特征所述的容器处理设备和一种根据并列权利要求13的特征所述的容器承载件来解决。一种相应的用于灌装容器的方法是并列权利要求14的主题。相应的从属权利要求在此涉及本发明的特别优选的实施变体。
7.提出一种容器处理设备、特别是灌装机,在所述容器处理设备中容器沿着输送方向被输送并且以填料灌装。对容器的灌装在此通常在输送期间进行。容器理解为瓶子、罐子或类似容器,其中,容器的具体种类和/或形对于本发明是不重要的。容器的材料在本发明中同样是不重要的,也就是说,所述容器可以例如是由玻璃、pet或铝构成的容器。对容器的输送通过容器承载件进行,所述容器承载件与相应的容器相匹配或者能够相匹配。容器承载件在此应该理解为任何主动的或被动的抓取装置、夹子或保持装置,借助于所述抓取装置、夹子或保持装置能够悬挂地、悬置地输送一个或多个容器。
8.因此,例如容器(该容器在其上部区域中具有凸缘)可以由具有半圆形的凹口的容器承载件悬挂地保持,所述凹口与凸缘相匹配。对容器的灌装通过灌装机的灌装元件进行。所述灌装元件例如包括出口和灌装阀,所述出口为了灌装自由悬挂地保持的容器而定位在容器的开口上方,所述灌装阀优选地是可控的。此外,容器处理设备具有用于检测保持在容器承载件上的容器的质量重量的称重单元。称重单元包括变形传感器,所述变形传感器在此是容器承载件的理想地集成的组成部分或者是由容器承载件包括的至少一个构件。为此,理想地呈应变计形式的称重单元布置在容器承载件的抓持臂中的至少一个抓持臂中或上。
9.借助于称重单元在灌装容器期间确定容器的质量重量并且由此确定由灌装元件输出的填料量。由此可以在达到容器的预给定的质量重量和由此预给定的灌装容量时通过关闭灌装阀而结束对容器的灌装。
10.根据本发明,称重单元具有至少一个变形传感器。至少一个变形传感器在此布置在容器承载件的至少一个表面区段中,从而变形传感器检测容器承载件的变形。所述变形通过如下方式产生,即容器的质量重量在灌装该容器时增大并且由此使容器承载件越来越大地弯曲。在此容器的质量重量越大,则容器承载件的由此引起的变形越大。也就是说,容器承载件的变形是容器的质量重量的量度。变形传感器如前所述地特别有利地直接布置在容器承载件的表面区段或者该容器承载件的构件中或上,也就是说,变形传感器优选地直接地并且面状地贴靠在表面区段、例如一个或两个承载的抓持臂上,从而建立变形传感器与表面区段之间的面状作用连接。此外,变形传感器也可以接收和/或加在容器承载件中,例如通过胶黏剂或树脂置入到凹口中。可理解的是,设置至适合的评估和控制单元以及至少一个供电装置的相应的连接装置。
11.特别有利地,在根据本发明的解决方案中与没有变形传感器的容器承载件相比减小了附加的空间需求,确切地说,使所述附加的空间需求最小。对测量数据和/或运行数据的评估在称重单元自身和/或评估和/或控制电子装置中进行。
12.有利地,变形传感器由至少一个应变计构成。应变计可以在此不仅确定与应变计面状作用连接的表面区段的延展而且确定其压缩。此外具有用于测量不同大小的变形的应变计,从而可以选择对于相应的容器承载件(及其横截面、材料和其他影响变形的特性)适合的应变计。此外,应变计具有非常小的高度并且为此根本不需要附加的空间并且在制造或采购中是价廉物美的。
13.有利的是,一个或多个变形传感器布置在容器承载件的上侧和/或下侧。通过容器的质量重量导致的容器承载件变形引起容器承载件的上侧的延展,所述延展由布置在容器承载件上侧的变形传感器来测量。同样,通过容器的质量重量导致的容器承载件变形引起容器承载件的下侧的压缩,所述压缩由布置在容器承载件下侧的变形传感器来测量。在多个变形传感器布置在容器承载件的上侧和下侧的情况中不仅测量延展而且测量压缩。由此特别有利地提高了测量精度。
14.此外可以有利的是,设置两个或更多个变形传感器,以便检测动力学影响、例如加速力和/或离心力并且区分当前质量和由此灌装量与期望的数据的差别。为此可以有利的是,一个或多个变形传感器布置在相应的容器承载件或容器承载件的构件的基本上水平的面上,特别是布置在抓持器或抓持臂上,并且此外一个或多个变形传感器布置在倾斜的或
基本上竖直定向的面上。变形的不同的数据可以接着与相应的、并行的速度值和/或加速度值一起被评估。
15.此外表明有利的是,称重单元根据相应的容器、特别是其重心位置相对于保持和抓持元件校准,以便能够可靠地检测前述的速度和/或加速度影响。
16.此外有利地,称重单元具有至少四个变形传感器。变形传感器在此布置在容器承载件的不同的表面区段上。如果容器承载件具有延伸通过被保持的容器的轴线的对称平面,则有利于将变形传感器相对于所述对称平面对称地布置。通过容器承载件的略微不对称的负荷导致的测量结果失真可以由此通过将两侧的测量结果相加或求平均值来避免。此外建议的是,在容器承载件的上侧和下侧分别布置一个变形传感器,从而如前所述地一个变形传感器记录延展并且另一个变形传感器记录压缩。变形传感器的与温度相关的测量结果失真、例如应变计的与温度相关的电阻改变通过上侧和下侧的测量结果的比较是不重要的或者具有仅仅非常小的重要性。由此取消温度传感器和对测量结果的温度相关性的考虑。
17.此外有利的是,变形传感器接入电桥电路中。借助于电桥电路能够直接并且在无附加的电子装置的情况下评估关于对称平面的对称性和上侧与下侧的存在的差别。也就是说,电桥电路提供对各个变形传感器的电阻的成本低廉的然而也鲁棒的处理。
18.有利地,电缆被焊接在变形传感器的触点部位上。变形传感器的测量结果由此可以在远离容器承载件的位置上被评估,在那里例如提供用于评估电子装置的更大的空间。
19.有利的是,在电缆的背离变形传感器的端部上布置插头。电缆可以借助于所述插头与容器处理设备的评估和/或控制电子装置连接。如果应必须更换容器承载件,则与评估和/或控制电子装置的电连接可以借助于插头容易地分开并且重新建立。特别有利地,插头防水地构造,从而可能产生的喷溅水或冷凝水不损害所述连接。
20.同样有利的是,变形传感器的安装部位防水地密封。由此可以使喷溅水或冷凝水不干扰地影响测量结果。
21.有利的是,容器的输送至少区段地在圆形轨迹上进行,并且变形传感器布置容器承载件的径向中部和/或径向内部。在圆形轨迹上的所述输送中,容器被保持在容器承载件的径向外部。通过将变形传感器布置在容器承载件径向中心尽可能好地抑制容器承载件变形时的边缘效应,所述边缘效应会在容器的区域中和在容器承载件的连接区域中产生。而变形传感器在容器承载件径向内部的布置具有的优点是,由此使变形传感器与容器从而与可能的喷溅水的间距最大化。
22.有利的是,容器承载件由不锈钢和/或塑料构成。不仅不锈钢而且多种塑料具有能复现的弹性模块,这对于由容器承载件的变形确定容器的质量重量是必要的。此外,不锈钢和塑料可以容易地被加工并且良好地适合作为用于容器承载件的材料。
23.此外,提出一种用于输送容器的容器承载件,其用于根据前述说明的容器处理设备。容器又理解为瓶子、罐子或类似容器,其中,容器的具体种类对于本发明是不重要的。容器的材料在本发明中也是不重要的,也就是说,所述容器可以例如是由玻璃、pet或铝构成的容器。
24.根据本发明,容器承载件包括用于检测保持在容器承载件上的容器的质量重量的称重单元,其中,称重单元具有至少一个变形传感器,所述变形传感器布置在容器承载件的
至少一个表面区段上用于检测所述容器承载件的变形。借助于所述称重单元可以在灌装容器期间确定容器的质量重量并且由此确定由灌装元件输出的填料量。容器承载件的变形通过以下方式产生,即容器的质量重量在灌装所述容器时增大并且由此使容器承载件越来越大地弯曲。在此容器的质量重量越大,则容器承载件的变形越大。也就是说,容器承载件的变形是容器的质量重量的量度。通过将变形传感器直接布置在容器承载件的表面区段上与没有变形传感器的容器承载件相比使附加的空间需求最小。通过小的附加的空间需求原则上也可以由具有称重单元的容器承载件替代没有称重单元的容器承载件,其中,容器处理设备关于确定容器的质量重量的功能被扩展。
25.容器承载件的有利的实施方式由具有容器承载件的容器处理设备的前述的有利的实施方式得出。
26.此外,提出一种用于灌装容器、例如瓶子、罐子或类似容器的方法。在此,容器沿着输送方向通过容器承载件输送并且由灌装机的灌装元件以填料灌装。对容器的灌装在此通常在输送容器期间进行。在灌装期间,保持在容器承载件上的容器的质量重量借助于称重单元来检测,并且当达到预给定的质量重量时,停止对容器的灌装。由此获得以预给定的灌装量灌装的容器。
27.在所述方法中,相应的灌装元件的流量和/或流动持续时间有利地根据称重单元的测量数据被控制。由此可以例如在停止灌装容器之前减小每个时间单位的流量,从而随着停止灌装实现在容器中的更准确的灌装量。在灌装容器时灌装速度的减小可以例如在预给定的灌装量并且由此容器的预给定的质量重量的情况下发生,其中,容器的质量重量又借助于称重单元来检测。
28.表明特别有利的是,动力学影响、例如离心力、加速度和速度与评估来自变形传感器的测量数据同时被评估并且算出所述影响。同样应该在灌装容器时考虑容器几何结构和特别重要地重心位置和重心改变。
29.根据本发明,所述方法借助于根据前述说明的容器处理设备实施。也就是说,称重单元特别是具有至少一个变形传感器,所述变形传感器布置在容器承载件的至少一个表面区段上。变形传感器在此、特别是也在灌装容器期间检测容器承载件的变形,所述变形是保持在容器承载件上的容器的质量重量的量度。
30.有利地,由称重单元的测量值借助于公式和/或查找表确定容器的质量重量。这可以通过目前的处理器无问题地并且实时地进行。在达到容器的预给定的质量重量时然后减小灌装容器时的灌装速度和/或停止对容器的灌装。所使用的公式在此优选地以经验为依据地确定,其中,公式中所使用的参数通过测量或者通过例如借助有限元法计算来确定。同样,查找表中的值通过测量或者通过例如借助有限元法计算来确定。取而代之,在达到称重单元的预给定的测量值时可以停止对容器的灌装。相应于容器的预给定的质量重量或容器的预给定的灌装量的所述测量值同样通过测量或者通过例如借助有限元法计算来确定。此外,也可以在达到称重单元的另外的预给定的测量值时减小灌装容器时的灌装速度。
31.本发明的进一步方案、优点和应用可能性也由实施例的下述说明和附图得出。在此,所有描述的和/或绘图示出的特征原则上与所述特征在权利要求中的组合或者其回引关系无关地单独地或者以任意的组合是本发明的内容。权利要求的内容也称为本说明的组成部分。
附图说明
32.下面借助实施例的附图详细地阐述本发明。附图示例性地示出:
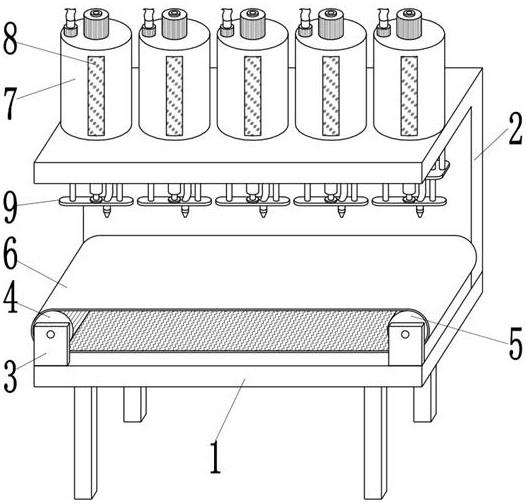
33.图1示出容器处理设备的示意性的俯视图,
34.图2a示出具有未灌装的容器的容器承载件的示意性的侧视图,
35.图2b示出根据图2a的具有至少部分地灌装的容器的容器承载件的另外的示意性的侧视图,
36.图3示出电桥电路,和
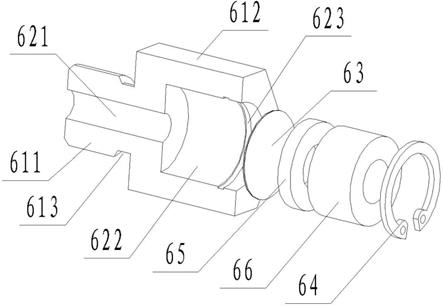
37.图4示出一个另外的容器承载件的透视图。
38.对于本发明的相同的或相同作用的元件在附图中使用相同的附图标记。此外,为了简明在各个附图中仅仅示出用于描述相应的附图所需的附图标记。
具体实施方式
39.图1示出构造为灌装机的容器处理设备1的示意性的俯视图。容器2可以是瓶子、罐子或类似容器,所述容器例如从输入星3被转送到容器处理设备1上。在容器处理设备1中,容器2由至少一个抓持器状的容器承载件4保持。所述容器承载件4布置在绕着竖直轴a旋转的转子5上并且在输送方向t上输送容器2,从而在容器处理设备1的区域中对容器2的输送至少区段地在部分圆形的轨迹上进行。
40.此外,容器处理设备1具有多个灌装元件6,所述灌装元件分别通过灌装阀7例如与圆形管道8连接。通过圆形管道8提供填料,容器2以所述填料被灌装,所述填料在本实施例中是含浆量很高的饮料。在从输入星3通过容器处理设备1接收容器2之后,相应的灌装阀7被打开并且由此开始对容器2的灌装。灌装元件6在灌装阀7打开的情况下灌装容器2,该灌装元件在此在图1中示例性地“黑色”涂满地示出。
41.布置在容器承载件4上和/或与所述容器承载件连接的变形传感器9在灌装容器2期间测量容器承载件4的变形。容器承载件4通常构造为使得其沿着相对于旋转轴线a径向地延伸的纵向轴线延伸并且具有两个对置的自由的端部区域,其中,从旋转轴线a朝外指向的自由端部区域在灌装过程期间保持容器2,并且容器承载件4以更邻近于旋转轴线a的、与容器对置的自由端部区域固定在转子5上。在灌装容器4并且从而引起容器4的质量重量改变时通过借助于容器承载件4将容器杠杆式保持在转子5上产生容器承载件4的、确切说例如在各个表面区段中的、至少可测量的变形或延展。
42.容器承载件4的根据由容器承载件4保持的容器2的质量重量的变形或延展是由容器承载件4保持的容器2的质量重量的量度。也就是说,通过测量容器承载件4的变形或延展可以推断出由容器承载件4保持的容器2的质量重量并且由此推断出容器2的灌装量。
43.变形传感器9优选地分别对称地布置在容器承载件4上。即使容器例如略微不对称地或倾斜地由容器承载件4接收时,也可以通过对称平面的两侧的测量结果求平均值准确地确定容器2的质量重量。
44.在达到容器2的预给定的质量重量和由此容器2的确定的灌装量时,关闭灌装阀7并且由此停止对容器2的灌装。在容器处理设备1的一个有利的进一步方案中,在达到另外的预给定的质量重量时可以减小容器2灌装的灌装速度,所述另外的预给定的质量重量小于导致停止对容器2的灌装的预给定的质量重量。由此能够更准确地保持容器2的预给定的
灌装量。
45.对容器2的灌装的停止可以在此在变形传感器9的预确定的测量值下进行。所述测量值在此通过测量或者通过例如借助有限元法计算这样确定,以使得所述测量值相应于容器2的预给定的灌装量。取而代之可以由变形传感器9的测量值借助于公式或查找表确定由容器承载件4保持的容器2的质量重量。优选地以经验为依据的公式的参数或者查找表中的值在此通过测量或者通过例如借助有限元法计算来确定。对容器2的质量重量的确定在此基于目前的处理器的高计算速度实时地进行。
46.在达到容器2中的期望的灌装量并且停止对容器2的灌装之后,容器2还短暂地在输送方向t上在容器处理设备1上被输送并且然后转送到输出星10上,所述输出星继续输送容器2用于另外的处理。
47.图2a示出容器承载件4的示意性的侧视图,所述容器承载件布置在容器处理设备1的转子5上。容器承载件4保持构造为瓶子的容器2,其中,本发明也涉及其他容器2、例如罐子。在图2a中,所述容器2还是空的。
48.构造为应变计的变形传感器9布置在容器承载件4的表面区段11上,其中,一个变形传感器布置在容器承载件的上侧12并且另一个变形传感器布置在容器承载件4的下侧13。然而本发明不局限于应变计,而是能够同样通过另外的变形传感器9实施。
49.电缆15被焊接在变形传感器9的触点部位14上,从而对容器承载件4的变形的测量可以远离容器承载件4实施。
50.图2b示出具有出自图2a的容器2的容器承载件4,其中,容器2大部分以填料16灌装。通过被灌装的容器2的增大的质量重量使容器承载件4变形,其中,所述变形在图中夸张地示出。
51.在容器承载件4的上侧12的变形传感器9在此经受延展,在容器承载件4的下侧13的变形传感器9经受压缩。原则上,变形传感器9足够用于确定容器承载件的变形4。然而有利地考虑由布置在上侧12和下侧13的变形传感器9测量到的变形之差用于确定容器2的质量重量。如果在变形传感器9中应会出现例如由温度决定的改变,则当考虑各个变形传感器9之间的差异时消除所述改变。
52.特别有利的是,在每个容器承载件4上布置四个变形传感器9,其中,两个变形传感器布置在容器承载件的上侧12,并且两个变形传感器布置在容器承载件4的下侧13,并且所述变形传感器9成对地相对于容器承载件4的对称平面对称地布置。通过关于分别对称地布置的变形传感器9求平均值并且产生布置在上侧12和下侧13的变形传感器9的差值可以在此得出结果,所述结果在很大程度上容器2在容器承载件4上的倾斜位置无关并且与变形传感器9的由温度决定的改变无关。
53.如果例如使用应变计(dms)作为变形传感器9,所述应变计的电阻随着延展或压缩改变,则所述评估可以优选地通过如图3中所示的电桥电路17进行。在此,r1是左上dms的电阻,r2是左下dms的电阻,r3是右下dms的电阻,并且r4是右上dms的电阻。电压源u为电桥电路17供应电压,并且通过测量电阻rm产生的电压被测量并且由此提供对各个电阻期望地求平均值和产生差值。
54.图4示出另外的容器承载件4的透视图,所述另外的容器承载件以被动式夹子的构型构造,所述夹子通过导入容器被打开并且通过弹性材料变形将容器固定在抓持位置中。
在所示的实例中,所述容器承载件4具有四个变形传感器9,所述变形传感器布置在这里两个空腔18的表面区段11上,所述空腔在此呈在容器承载件4的抓持臂式的侧向的元件4.1,4.2上的窗或凹口的形式。
55.在所示的实例中,在每个空腔18中在安装状态中的水平的表面区段11上分别施加变形传感器9或者将所述变形传感器置入到那里的凹进部中。
56.容器承载件4通过开口20借助于适合的装置安置在容器处理设备1的承载元件(在图4中未示出)上,从而包装或例如容器2可以被接收在位于外部的抓持和保持端部21上。
57.在电缆15的背离变形传感器9的端部上布置插头19,其中,在此借助于电缆15分别将2个变形传感器9通过相应的触点部位14导电地连接。所述插头19实现将变形传感器9快速地并且容易地与容器处理设备1的相应于的插座连接。也在例如由于磨损而更换容器承载件4时,变形传感器9至容器处理设备1的连接可以借助于插头19快速地松开和重新建立。
58.优选地,所述插头19构造为防水的插头19,从而喷溅水和/或冷凝水不能影响测量结果。
59.显而易见地,替换地或附加地将变形传感器9可以设置在容器承载件的上部元件4.1(未示出)上。
60.本发明在上文中描述了实施例,在此在所述实施例中仅仅非常示意性地示出容器承载件并且这理解为,也能够以类似方式设置复杂的、特别是也能主动地被控制的、具有支承的并且能摆动的抓持臂的抓持器。
61.此外可以理解的是,在不脱离由此本发明的由权利要求定义的保护范围的情况下实现多种改变或变体。完全通用地,变形传感器9以保护涂层(未示出)覆盖或者相应地浇注凹口,所述变形传感器被置入所述凹口中。
62.附图标记列表
[0063]1ꢀꢀꢀꢀꢀꢀꢀ
容器处理设备
[0064]2ꢀꢀꢀꢀꢀꢀꢀ
容器
[0065]3ꢀꢀꢀꢀꢀꢀꢀ
输入星
[0066]4ꢀꢀꢀꢀꢀꢀꢀ
容器承载件
[0067]
4.1
ꢀꢀꢀꢀꢀ
侧向元件
[0068]
4.2
ꢀꢀꢀꢀꢀ
上部元件
[0069]5ꢀꢀꢀꢀꢀꢀꢀ
转子
[0070]6ꢀꢀꢀꢀꢀꢀꢀ
灌装元件
[0071]7ꢀꢀꢀꢀꢀꢀꢀ
灌装阀
[0072]8ꢀꢀꢀꢀꢀꢀꢀ
圆形管道
[0073]9ꢀꢀꢀꢀꢀꢀꢀ
变形传感器
[0074]
10
ꢀꢀꢀꢀꢀꢀ
输出星
[0075]
11
ꢀꢀꢀꢀꢀꢀ
表面区段
[0076]
12
ꢀꢀꢀꢀꢀꢀ
上侧
[0077]
13
ꢀꢀꢀꢀꢀꢀ
下侧
[0078]
14
ꢀꢀꢀꢀꢀꢀ
触点部位
[0079]
15
ꢀꢀꢀꢀꢀꢀ
电缆
[0080]
16
ꢀꢀꢀꢀꢀꢀ
填料
[0081]
17
ꢀꢀꢀꢀꢀꢀ
电桥电路
[0082]
18
ꢀꢀꢀꢀꢀꢀ
空腔
[0083]
19
ꢀꢀꢀꢀꢀꢀ
插头
[0084]
20
ꢀꢀꢀꢀꢀꢀ
开口
[0085]
21
ꢀꢀꢀꢀꢀꢀ
抓持和保持端部
[0086]
25
ꢀꢀꢀꢀꢀꢀ
支承和固定区段
[0087]
a
ꢀꢀꢀꢀꢀꢀꢀ
轴线
[0088]
r1,
…
,r4
ꢀꢀ
电阻
[0089]
rm
ꢀꢀꢀꢀꢀꢀ
测量电阻
[0090]
t
ꢀꢀꢀꢀꢀꢀꢀ
输送方向
[0091]
u
ꢀꢀꢀꢀꢀꢀꢀ
电压源。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。