1.本发明涉及燃料加注设备技术领域,具体地涉及一种悬挂式加油机。
背景技术:
2.加油站作为油品销售终端,其站内车辆加油效率直接决定油品销售企业经营利润。目前,加油站大多采用立式加油机,只在加油岛的两侧设置加油车位,以用于驶入加油站的待加油车辆停靠加油。但是,随着汽车的应用越来越广泛,加油站的待加油车辆的车流量越来越大,加油站仅仅通过在加油岛两侧设置加油车位,导致加油车位的数量过低,还造成了立式加油机浪费了加油站的地面空间,妨碍了充分加油站的地面空间来合理规划加油车位,满足不了日益增长的待加油车辆的加油需求,导致加油站内出现汽车拥堵、加油排队押车等问题,造成了客户的严重流失,加油效率低,在加油需求高的情况下仍然无法提高加油站的油品销售量,收益差。
技术实现要素:
3.本发明的目的是为了克服现有技术存在的加油站因采用立式加油机导致的无法充分利用加油站的地面空间合理规划加油车位、加油站排队严重、无法满足较大车流量的待加油车辆的加油需求等问题,提供一种悬挂式加油机,该加油机悬挂安装于罩棚,不占用加油站的地面空间,有利于充分利用加油站的地面空间进行合理规划以得到更多地加油车位,显著地扩充了加油站的加油车位,减少了加油站内因采用立式加油机占地大而造成的排队押车严重等问题,加油机在需要加油时则将加油枪下降,方便快捷,有利于提高了加油效率。
4.为了实现上述目的,本发明一方面提供一种悬挂式加油机,所述加油机包括加油枪、引导机构、油管以及用于悬挂安装于加油站的罩棚的本体,所述引导机构安装于所述本体并且设置为能够引导所述油管的延伸路径,所述加油枪通过所述油管与所述本体油液连通,并且所述加油枪能够根据所述油管的延伸路径的变化进行升降运动。
5.可选的,所述引导机构包括引导所述油管延伸的升降臂,所述升降臂的第一端安装于所述本体,所述升降臂的第二端挂放有所述加油枪并且设置为能够相对于所述第一端进行升降运动以带动所述加油枪进行同步升降。
6.可选的,所述升降臂包括第一升降臂,所述第一升降臂包括依次铰接以能够折叠在一起的多个折叠臂节,位于首端的所述折叠臂节安装于所述本体,位于尾端的所述折叠臂节挂放有所述加油枪以及安装有所述油管,多个所述折叠臂节设置能够依次在竖直面上旋转以彼此错开进行延展运动,进而带动所述油管同步向下延伸以及所述加油枪下降。
7.可选的,所述第一升降臂包括旋转臂节,所述旋转臂节的一端可旋转地连接于所述本体并且能够相对于所述本体进行水平旋转,所述旋转臂节的另一端与位于首端的所述折叠臂节连接,所述油管分别安装于所述旋转臂节的两端。
8.可选的,所述升降臂包括第二升降臂,所述第二升降臂包括依次套设的多个套管
臂节,位于最外层的所述套管臂节安装于所述本体,位于最内层的所述套管臂节套设在所述油管外并且挂放有所述加油枪,多个所述套管臂节设置为能够沿竖直方向从内向外依次向下延伸以带动所述油管和加油枪同步下移。
9.可选的,所述引导机构包括安装于所述本体的绞盘和电机,所述电机与所述第二升降臂传动连接,所述电机的主动轴沿第一方向旋转时带动多个所述套管臂节依次向下延伸并且沿与所述第一方向相反的第二方向旋转时带动多个所述套管臂节依次套在一起,所述绞盘与所述主动轴传动连接并且用于卷绕所述油管的位于所述本体被所述第二升降臂之间的中间部分,所述绞盘设置为能够在所述主动轴沿第二方向旋转时卷绕所述油管的中间部分。
10.可选的,所述引导机构包括导轨和滑移件,所述导轨安装于本体,所述滑移件可移动地安装于所述导轨并且设置为能够沿所述导轨的延伸方向移动,所述油管担在所述滑移件上并且能够随着所述滑移件的移动改变所述油管的延伸路径,以带动所述加油枪进行升降运动。
11.可选的,所述导轨包括并行设置的第一导轨和第二导轨,所述滑移件包括装配在所述第一导轨的第一滑移件以及装配在所述第二导轨的第二滑移件,所述油管依次绕过所述第一滑移件和第二滑移件,所述油管设置为能够随着所述第一滑移件和第二滑移件的彼此靠近而下降并且随着第一滑移件和第二滑移件的彼此远离而上升。
12.可选的,所述第一导轨和第二导轨分别设置为向下弯曲的弧形结构,所述第一导轨和第二导轨共同形成的弧形面位于所述油管的连接于所述本体的连接点的下方区域。
13.可选的,所述第一导轨的形状和所述第二导轨的形状相同。
14.可选的,所述第一导轨和所述第二导轨设置为半径相等并且呈同轴线设置的半圆结构。
15.可选的,所述油管的连接于所述本体的连接点位于所述第一导轨和所述第二导轨共同形成的圆弧面所在圆柱形的中心轴线上。
16.可选的,所述第一滑移件包括与所述第一导轨的啮合连接的第一齿轮以及从所述第一齿轮朝向所述第二滑移件延伸的第一杆件,所述油管担在所述第一杆件上。
17.可选的,所述第二滑移件包括与所述第二导轨的啮合连接的第二齿轮以及从所述第二齿轮朝向所述第一滑移件延伸的第二杆件,所述油管担在所述第二杆件上。
18.可选的,所述加油机包括动力电机、防护传感器以及分别与所述动力电机和防护传感器电连接的控制单元,所述动力电机安装于所述本体并且设置能够驱动所述滑移件沿所述导轨移动,所述防护传感器安装在所述油管的邻近所述加油枪的部分并且能够探测到所述加油枪周围预定范围内的障碍物,所述控制单元设置为能够根据所述防护传感器的信号控制所述第二电机的运行。
19.通过上述技术方案,本发明提供一种悬挂式加油机,该加油机悬挂安装于罩棚,不占用加油站的地面空间,有利于充分利用加油站的地面空间进行合理规划以得到更多地加油车位,显著地扩充了加油站的加油车位,减少了加油站内因采用立式加油机占地大而造成的排队押车严重等问题,加油机在需要加油时则将加油枪下降,方便快捷,有利于提高了加油效率。
附图说明
20.图1是本发明提供的第一种具体实施方式的加油单元的结构示意图;
21.图2是本发明提供的第二种具体实施方式的加油单元的结构示意图;
22.图3是所示的图2的主视图;
23.图4是本发明提供的第三种具体实施方式的加油单元的结构示意图;
24.图5是所示的图4的主视图。
25.附图标记说明
26.1、第一轨道;2、第二轨道;3、油管;4、加油枪;5、升降臂;6、旋转电机;7、折叠臂节;8、旋转臂节;9、套管臂节;10、绞盘;11、导轨; 12、滑移件;13、第一滑移件;14、第二滑移件;15、轨道电机。
具体实施方式
27.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
28.本发明提供了一种悬挂式加油机,如图1-5所示,所述加油机包括加油枪4、引导机构、油管3以及用于悬挂安装于加油站的罩棚的本体,所述引导机构安装于所述本体并且设置为能够引导所述油管3的延伸路径,所述加油枪4通过所述油管3与所述本体油液连通,并且所述加油枪4能够根据所述油管3的延伸路径的变化进行升降运动。
29.通过上述技术方案,本发明提供一种悬挂式加油机,该加油机悬挂安装于罩棚,不占用加油站的地面空间,有利于充分利用加油站的地面空间进行合理规划以得到更多地加油车位,显著地扩充了加油站的加油车位,减少了加油站内因采用立式加油机占地大而造成的排队押车严重等问题,加油机在需要加油时则将加油枪下降,方便快捷,有利于提高了加油效率。
30.如图1-3所示,为了使得加油枪4能够进行升降运动,引导机构可以采用升降臂,则油管3在升降臂5的引导下延伸并且能够在升降臂5进行升降运动时改变延伸路径以使得油管3的连接加油枪4的一端进行升降运动,进而带动加油枪4随之升降;在此基础上,为了使得加油枪4能够稳定升降,所述引导机构包括引导所述油管3延伸的升降臂5,所述升降臂5的第一端安装于所述本体,所述升降臂5的第二端挂放有所述加油枪4并且设置为能够相对于所述第一端进行升降运动以带动所述加油枪4进行同步升降,通过将加油枪4挂放在升降臂5的第二端,使得加油枪4的升降运动更为稳定。
31.进一步的,所述加油机包括驱动电机和防护传感器,所述控制单元分别与所述驱动电机和防护传感器电连接,所述驱动电机安装于所述本体并且通过传动机构驱动所述升降臂5进行升降运动,所述防护传感器安装在所述升降臂5的用于挂放所述加油枪4的部分并且能够探测到所述加油枪4周围预定范围内的障碍物,所述控制单元设置为能够根据所述防护传感器的信号控制所述驱动电机的运行,优化了加油枪4下落过程中的智能防护,避免了加油枪4在下移过程中刮车或者砸到工作人员,提高了加油机的安全性能。其中,防护传感器可以设置为各种合理形式,例如,位移传感器等,以便于实时探测防护传感器与周围障碍物的距离,所述的预定范围可以为各种合理数值,只要能够避免加油枪4碰撞障碍物即可,例如20cm。
32.根据本发明的第一种具体实施方式,如图1和2所示,所述升降臂 5包括第一升降臂,所述第一升降臂包括依次铰接以能够折叠在一起的多个折叠臂节7,位于首端的所述折叠臂节7安装于所述本体,位于尾端的所述折叠臂节7挂放有所述加油枪4以及安装有所述油管3,多个所述折叠臂节 7设置能够依次在竖直面上旋转以彼此错开进行延展运动,进而带动所述油管3同步向下延伸以及所述加油枪4下降,有利于控制加油枪4顺畅下降,结构简单,操作便利,避免油管3因加油枪4反复升降而乱缠一团,保证了第一升降臂的稳定运行。
33.进一步的,所述第一升降臂包括旋转臂节8,所述旋转臂节8的一端可旋转地连接于所述本体并且能够相对于所述本体进行水平旋转,所述旋转臂节8的另一端与位于首端的所述折叠臂节7连接,所述油管3分别安装于所述旋转臂节8的两端,操作便捷,有利于根据实际需求的不同来合理调节加油枪4在水平方向移动,以使得加油机能够更好地适应车辆的停靠位置以及油箱口的具体设置位置(左侧或者右侧)。
34.使用时,先调节加油枪的高度,将折叠在一起的多个折叠臂节7依次绕竖直面旋转以延展至合理高度,其中,根据油箱口的高度不同,可以将多个折叠臂节7同时延展,也可只将其中的一部分折叠臂节7延展,只要满足加油枪4能够插入油箱口的高度需求即可;随后调节加油枪的水平位置,将旋转臂节8进行水平旋转,以带动多个折叠臂节7和加油枪4同步水平旋转,直至加油枪4移动至邻近油箱口的位置,以便于将加油枪4插入油箱口进行注油操作;待完成加油后,将加油枪收到原来位置,具体可参考加油枪的下降过程,方便快捷,避免油管采用传统绞盘缠绕时因反复收放操作而导致的油管乱成一团。其中,加油机可以包括驱动电机,该驱动电机通过传动结构与多个折叠臂节7传动连接,驱动电机设置为能够带动多个折叠臂节7依次竖直旋转以折叠或者延展,以调节加油枪的高度;此外,在加油枪下移过程中,当防护传感器没有探测到加油枪4周围预定范围内存在障碍物,则驱动电机继续运行,加油枪继续下移;当防护传感器探测到加油枪4周围预定范围内存在障碍物,则防护传感器向控制单元发出障碍信号,以使得控制单元根据该障碍信号控制驱动电机停止运行,则加油枪停止下移;还有,加油机还可以包括旋转电机6,该旋转电机6通过传动结构与旋转臂节8传动连接,旋转电机设置为能够带动旋转臂节8水平旋转以调节加油枪的水平位置。油管3可以采用各种合理方式安装在第一升降臂上,可以采用装在第一升降臂的外部,也可以穿插在第一升降臂中,只要绕开第一升降臂的铰接处即可。
35.根据本发明的第二种具体实施方式,如图3所示,所述升降臂5包括第二升降臂,所述第二升降臂包括依次套设的多个套管臂节9,位于最外层的所述套管臂节9安装于所述本体,位于最内层的所述套管臂节9套设在所述油管3外并且挂放有所述加油枪4,多个所述套管臂节9设置为能够沿竖直方向从内向外依次向下延伸以带动所述油管3和加油枪4同步下移,有利于加油枪4顺畅下移。
36.进一步的,所述引导机构包括安装于所述本体的绞盘10和电机,所述电机通过传动结构与所述第二升降臂传动连接,所述电机的主动轴沿第一方向旋转时带动多个所述套管臂节9依次向下延伸并且沿与所述第一方向相反的第二方向旋转时带动多个所述套管臂节9依次套在一起,所述绞盘10通过传动机构与所述主动轴传动连接并且用于卷绕所述油管3的位于所述本体被所述第二升降臂之间的中间部分,所述绞盘10设置为能够在所述主动轴沿第二方向旋转时卷绕所述油管3的中间部分,使得绞盘能够随着第二升降臂的上升运动而自动缠绕油管3,操作简单,使用便捷。
37.使用时,将第二升降臂的多个套管臂节9从内向外逐层下移,以带动加油枪4和油管3同步下移,待加油枪4下降至合适高度时,停止套管臂节9 继续向下延伸,以便于将加油枪4插入油箱口进行注油操作,在此过程中,绞盘在电机的带动下沿第一方向旋转,不断放油管3,以适应油管在套管臂节9的带动下同步下移;待完成加油后,将加油枪收到原来位置,具体可参考加油枪的下降过程,在此过程中,绞盘在电机的带动下沿与第一方向相反的第二方向旋转,不断收油管3,以适应油管在套管臂节9的带动下同步上移,方便快捷。其中,加油机可以包括驱动电机,该驱动电机通过传动结构与多个套管臂节传动连接,驱动电机设置为能够带动多个套管臂节从内向外依次逐层延伸以下移或上升,以调节加油枪的高度。可以理解的是,第二升降臂中的多个套管臂节还可以沿竖直方向从外向内逐层向下延伸,则油管3 设置在最外层的套管臂节上,加油枪也相应的挂放在最外层的套管臂节上。此外,在加油枪下移过程中,当防护传感器没有探测到加油枪4周围预定范围内存在障碍物,则电机继续运行,加油枪继续下移;当防护传感器探测到加油枪4周围预定范围内存在障碍物,则防护传感器向控制单元发出障碍信号,以使得控制单元根据该障碍信号控制电机停止运行,则加油枪停止下移。
38.根据本发明的第三种具体实施方式,如图4和5所示,所述引导机构包括导轨11和滑移件12,所述导轨11安装于本体,所述滑移件12可移动地安装于所述导轨11并且设置为能够沿所述导轨11的延伸方向移动,所述油管3担在所述滑移件12上并且能够随着所述滑移件12的移动改变所述油管 3的延伸路径,以带动所述加油枪4进行升降运动,结构简单,便于操作。
39.进一步的,所述导轨11包括并行设置的第一导轨和第二导轨,所述滑移件12包括装配在所述第一导轨的第一滑移件13以及装配在所述第二导轨的第二滑移件14,所述油管3依次绕过所述第一滑移件13和第二滑移件14,所述油管3设置为能够随着所述第一滑移件13和第二滑移件14的彼此靠近而下降并且随着第一滑移件13和第二滑移件14的彼此远离而上升,操作简单,能够快速地调节加油枪的升降运动。
40.如图4和5所示,所述第一导轨和第二导轨分别设置为向下弯曲的弧形结构,所述第一导轨和第二导轨共同形成的弧形面位于所述油管3的连接于所述本体的连接点的下方区域,结构简单,便于加工。
41.进一步的,为了简化两个导轨的加工工艺,所述第一导轨的形状和所述第二导轨的形状相同,有助于利用第一导轨和第二导轨来共同调节对油管的延伸路径,便于引导油管3更为精确地进行升降运动。其中,第一导轨和第二导轨可以设置为各种合理形状,例如,椭圆形。
42.优选地,所述第一导轨和所述第二导轨设置为半径相等并且呈同轴线设置的半圆结构,使得调节过程更为直观,操作更为简单高效。
43.进一步的,所述油管3的连接于所述本体的连接点位于所述第一导轨和所述第二导轨共同形成的圆弧面所在圆柱形的中心轴线上,设计更为合理。
44.进一步的,所述第一滑移件13包括与所述第一导轨的啮合连接的第一齿轮以及从所述第一齿轮朝向所述第二滑移件14延伸的第一杆件,所述油管3担在所述第一杆件上,结构简单,便于操作。
45.进一步的,所述第二滑移件14包括与所述第二导轨的啮合连接的第二齿轮以及从
所述第二齿轮朝向所述第一滑移件13延伸的第二杆件,所述油管3担在所述第二杆件上,结构简单,便于操作。
46.如图4和5所示,最初,加油枪4处于悬挂状态,为了避免加油枪4碰撞下方区域的各种装置(例如,车辆,工作人员等),加油枪4处于最高位置,即,第一滑移件13处于如图5所示最右侧,第二滑移件14处于如图5 所示的最左侧,此时,油管3分别担在第一滑移件13和第二滑移件14上,油管3的延伸路径为:自油管3的连接于所述本体的连接点
---
第一导轨最右侧位置
---
第二导轨最左侧位置
---
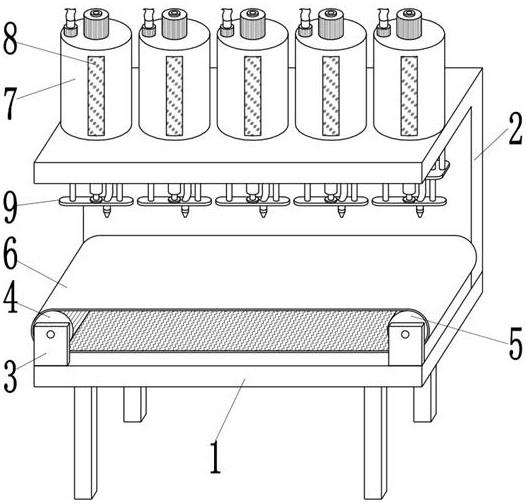
自第二滑移件14的第二杆件处竖直向下延伸。使用时,先将第二滑移件14沿第二导轨从最左侧位置向右移动,移动至第二导轨的最低位置处,则油管3随着第二滑移件14的移动不断下移,此时,油管的延伸路径为:自油管3的连接于所述本体的连接点
---
第一导轨最右侧位置
---
第二导轨最低位置
---
自第二滑移件14的第二杆件处竖直向下延伸,则油管3的连接于所述本体的连接点位于油管的在第二滑移件14的第二杆件的作用下竖直向下延伸的部分的所在直线上,使得加油枪能够处于油管自油管3的连接于所述本体的连接点处在油管和加油枪的重力作用下竖直向下延伸的延伸方向上,便于根据油管3的连接于所述本体的连接点对加油枪4进行后续的定向下移;随后,对加油枪4进行定向下移(即,使得加油枪4始终在自油管3的连接于所述本体的连接点处竖直向下延伸的延伸方向上进行下移),调节第一滑移件13,使得第一滑移件13沿第一导轨从最右侧位置向左移动,第一滑移件13如图5所示逐渐靠近第二滑移件14,油管 3沿图5所示的延伸路径进行延伸,随着第一滑移件13越来越靠近第二滑移件14,加油枪4逐渐下移,直至下移至合适高度为止,则停止第一滑移件左移,以便于将加油枪插入到油箱口进行注油操作,此时,油管的延伸路径为:自油管3的连接于所述本体的连接点
---
第一滑移件的位置(第一导轨的右半侧位置)
---
第二导轨最低位置
---
自第二滑移件14的第二杆件处竖直向下延伸;待完成注油操作后,将加油枪进行上移操作,第一滑移件和第二滑移件的调节顺序可以根据实际需求进行合理安排,具体不再赘述。
47.可以理解的是,油管3的长度仅是略长于油管3的连接于所述本体的连接点和油箱口之间的距离,则需要将油管3完全放开,才能将加油枪4下移至最低位置,则,第一滑移件向左移动至第一导轨的最低位置或者是继续左移至第一导轨的左半侧,油管3几乎不受第一滑移件13和第二滑移件14的干涉,则油管3自油管3与本体的连接处在油管3和加油枪4的重力作用下竖直向下延伸,此时,油管的延伸路径为:自油管3的连接于所述本体的连接点竖直向下延伸,加油枪4的位置最低,以便于将加油枪插入到油箱口进行注油操作。
48.进一步的,所述加油机包括动力电机、防护传感器以及分别与所述动力电机和防护传感器电连接的控制单元,所述动力电机安装于所述本体并且设置能够通过传动机构驱动所述滑移件12沿所述导轨11移动,所述防护传感器安装在所述油管3的邻近所述加油枪4的部分并且能够探测到所述加油枪 4周围预定范围内的障碍物,所述控制单元设置为能够根据所述防护传感器的信号控制所述动力电机的运行,优化了加油枪4下落过程中的智能防护,避免了加油枪4在下移过程中刮车或者砸到工作人员,提高了加油机的安全性能。其中,防护传感器可以设置为各种合理形式,例如,位移传感器等,以便于实时探测防护传感器与周围障碍物的距离,所述的预定范围可以为各种合理数值,只要能够避免加油枪4碰撞障碍物即可,例如20cm。当然,动力电机可以通过传动结构与第一滑移件13传动连接,在加油枪下移过程中,当防护传感器没有探测到加油枪4周围预定范围内存在障碍物,则动力电
机继续运行,加油枪继续下移;当防护传感器探测到加油枪4周围预定范围内存在障碍物,则防护传感器向控制单元发出障碍信号,以使得控制单元根据该障碍信号控制电机停止运行,则加油枪停止下移;可以理解的是,在第二滑移件移动过程中,加油枪始终处于较高位置,不会遇到障碍物,但是,为了实现全方位防护,加油机还可以再设置一个动力电机,该动力电机通过传动结构与第二滑移件传动连接以驱动第二滑移件14沿第二导轨移动,该动力电机与控制单元电连接,以使得控制单元能够根据所述防护传感器的信号控制所述动力电机的运行,具体运行过程可参照与第一滑移件传动连接的动力电机,不再赘述;进一步的,为了使得第二滑移件能够停止在第二导轨的最低点,需要在第二导轨的最低位置处设置位移传感器,该位移传感器能够探测第二滑移件的具体位置并且向控制单元发出信号以控制与第二滑移件传动连接的动力电机的运行,待位移传感器探测到第二滑移件移动至第二导轨的最低点,则位移传感器通过控制单元控制与第二滑移件传动连接的动力电机停止运行。
49.在此基础上,本发明的加油机可以应用于一种加油系统,所述加油系统包括:监测单元,所述监测单元设置为能够对驶入的待加油车辆进行追踪监测并且能够获取所述待加油车辆的停靠车位以及所述待加油车辆的油箱口相对于所述停靠车位的相对位置;加油机,所述加油机包括悬挂安装于罩棚的本体以及安装于所述本体的加油枪4,所述本体设置为能够沿水平方向在所述罩棚的下方区域进行可定位的移动,所述加油枪4设置为能够相对所述本体下移并且插入所述油箱口;控制单元,所述控制单元与所述监测单元和所述加油机电连接,以根据所述监测单元获取的所述停靠车位以及所述油箱口的所述相对位置控制所述本体移至所述油箱口的上方并控制所述加油枪4 下移并且插入所述油箱口。
50.通过上述技术方案,该加油系统采用悬挂式加油机,能够将加油机悬挂安装于罩棚,有利于根据待加油车辆所停靠的任意车位移动到待加油车辆的油箱口的上方,移动便捷,有助于满足停靠在不同车位的待加油车辆的加油需求,显著地扩充了加油车位,减少了采用立式加油机导致仅能在加油岛两侧设置加油车位而造成的排队押车严重等问题,提高了加油效率;而且,通过设置监测单元,能够对驶入的待加油车辆进行追踪监测并且获取其停靠车位,有利于定向追踪每一个待加油车辆以及精准获取油箱口的所在位置,为加油机的移动和停靠提供了精准地位置信息,实现了对加油机的移动进行精准化、智能化控制,提高了加油效率。
51.进一步的,所述监测单元包括监测模块和分析模块,所述监测模块设置为能够对所述待加油车辆进行追踪拍摄并且将拍摄的图像传递给所述分析模块,所述分析模块设置为能够根据所述图像进行分析处理以获取所述油箱口在以所述停靠车位的长边车位线为x轴、以所述停靠车位的短边车位线为 y轴、以所述停靠车位的两个后拐角点的其中一个为原点所构建的坐标系中的坐标点位置,能够通过追踪拍摄的方式来获取待加油车辆的停靠车位以及油箱口相对于停靠车位的相对位置,更为精准、高效。其中,坐标系的原点可以以停靠车位的两个后拐角点中的任意一个作为原点,例如,当油箱口设置在待加油车辆的左侧时,则以左侧的后拐角点为坐标系原点;当油箱口设置在待加油车辆的右侧时,则以右侧的后拐角点为坐标系原点;当然,也可以始终采用左侧的后拐角点(或者右侧的后拐角点)为坐标系原点,无论油箱口设置在待加油车辆的左侧还是右侧。
52.具体的,所述监测模块包括第一监测部分、追踪部分和第二监测部分,其中:所述
第一监测部分设置为能够对行驶到加油站的入口的所述待加油车辆进行拍摄以得到第一图像并且能够将所述第一图像传递给所述分析模块以获取所述油箱口在所述待加油车辆的设置点位;
53.所述追踪部分设置为能够对驶入所述加油站的所述待加油车辆进行追踪拍摄以得到追踪图像并且能够将所述追踪图像传递给所述分析模块以获取所述待加油车辆最终停靠的所述停靠车位的车位信息;
54.所述第二监测部分设置为能够对停靠的所述待加油车辆进行拍摄以得到第二图像并且能够将所述第二图像传递给所述分析模块以获取所述待加油车辆相对于所述停靠车位的所述相对位置;
55.并且,所述分析模块能够根据所述第一图像、追踪图像和第二图像进行综合分析以获取所述油箱口的所述坐标点位置,以便于精准、及时地获取油箱口的坐标点位置。其中,第一监测部分可以设置为各种合理形式,只要能够使分析模块通过拍摄的第一图像获取油箱口在待加油车辆的设置点位即可,例如,采用监控摄像头,该监控摄像头可以对加油站入口的待加油车辆进行监控拍摄以获取第一图像,分析模块可以能够根据第一图像获取该待加油车辆的车型信息进而取得油箱口在待加油车辆的具体设置点位,例如,油箱口设置在待加油车辆的左侧还是右侧,以及油箱口在该车辆的具体设计位置的尺寸参数,当然,监控摄像头可以对待加油车辆的车头进行拍摄或者对待加油车辆进行全方位拍摄,只要能够使分析模块根据拍摄得到的第一图像获取油箱口的设置点位即可。其中,追踪部分可以设置为各种合理形式,只要能够使分析模块通过追踪拍摄的追踪图像获取待加油车辆的停靠车位的车位信息即可,例如,采用360
°
摄像头,该360
°
摄像头可以对待加油车辆进行追踪监控拍摄以获取追踪图像,例如,可以从待加油车辆行驶到加油站入口开始直到其停靠在停靠车位为止进行全程追踪拍摄,避免了因加油站内的车辆多而使得第一监测部分获取的第一图像与追踪部分获取的追踪图像不是同一车辆,造成了油箱口的判断因为待加油车辆的行驶而导致追踪部分在第一监测部分完成后进行后续监测时出现监测失误,提高了对加油车辆的监测精度。其中,第二监测部分可以设置为各种合理形式,只要能够使分析模块通过拍摄的第二图像获取待加油车辆相对于停靠车位的相对位置即可,例如,采用设置在停靠车位正上方的监控摄像头,该监控摄像头可以停靠车位上的待加油车辆采用俯拍的方式进行监控拍摄以获取第二图像,分析模块可以能够根据第二图像获取该待加油车辆在停靠车位中的所述相对位置,也就是,待加油车辆的外轮廓在停靠车位中的具体位置;这样,分析模块能够根据第一图像获取油箱口设置在左侧还是右侧、以及油箱口在该车辆的具体设计位置的尺寸参数,可以说是,获取了油箱口相对于待加油车辆的外轮廓的设置点位(该外轮廓,可以选取与油箱口最为接近的两个外轮廓边界,其中,一个外轮廓边界上的与油箱口的连线沿车辆的长度方向延伸的点与油箱口的距离为其中一个点位参数,另一个外轮廓边界上的与油箱口的连线沿车辆的宽度方向延伸的点与油箱口的距离为另一个点位参数),随后,分析模块通过追踪部分获取待加油车辆最终停靠的停靠车位的车位信息,也就是,获取待加油车辆停靠在哪个停靠车位形成的坐标系中,以便于根据该坐标系来精准定位油箱口的位置,最后,分析模块根据第二图像来获取所述待加油车辆相对于所述停靠车位的所述相对位置,也就是,根据第二图像获取了外轮廓相对于停靠车位的相对位置,进而联系分析模块根据第一图像获取的油箱口相对于外轮廓的相对位置,则可以得到油箱口在停靠车
位的相对位置,再结合分析模块根据追踪图像获取的停靠车位的车位信息以锁定该停靠车位所在坐标系,则最终获得油箱口所在坐标系以及在该坐标系中的坐标点位置。其中,分析模块可以设置为各种合理形式,只要能够对第一图像、追踪图像和第二图像进行综合分析以最终获取所述油箱口的所述坐标点位置,并且能够向控制单元发生该坐标点位置的信号,以使得控制单元能够控制加油机的本体移动至油箱口的上方以及加油枪4下移并插入油箱口即可。
56.进一步的,所述分析模块设置为能够根据所述第一图像识别所述待加油车辆的车牌号,并且所述分析模块设置为能够根据所述车牌号获取所述待加油车辆的车型信息以得到所述油箱口的设置点位,以及所述分析模块设置为能够根据所述车牌号获取所述待加油车辆的加油记录中的油号信息,更为简便,有利于控制单元在待加油车辆停靠到停靠车位后能够快速控制加油机移动,节省了加油系统中监测单元的处理时间,加速了待加油车辆的整个加油进程。可以理解的是,第一监测部分可以通过对待加油车辆进行全方位监测拍摄(包括车头、车尾、俯拍车身、侧拍车门等)得到第一图像,该第一图像包括待加油车辆的各种外形特征,也可以通过仅监测拍摄车牌号来得到第一图像,该第一图像包括待加油车辆的车牌号;此外,待加油车辆在加油时,如果是初次在加油站加油,则将通过工作人员询问等方式来获取油号信息,并且将该油号信息与该待加油车辆的车牌号绑定以形成具有油号信息的加油记录,以便于下一次加油时快速调取;如果该待加油车辆再次在加油站加油,则分析模块可以通过车牌号快速调取加油记录,以快速得到油号信息,并且通过控制单元控制具有该油号信息的加油机移动至该油箱口的上方。
57.为了便于加油机的本体能够快速地、精准地移动至油箱口的上方,所述加油系统包括沿所述加油站规划的车位的长边车位线的方向延伸的第一轨道1以及沿所述车位的短边车位线的方向延伸的第二轨道2,所述本体可活动地安装于所述第一轨道1,所述第一轨道1设置为能够沿所述第二轨道2 的延伸方向移动并带动所述本体同步移动,所述本体设置为能够沿所述第一轨道1的延伸方向移动,定位精准,操作便捷。可以理解的是,第一轨道1 沿该坐标系的x轴方向设置,第二轨道2以该坐标系的y轴方向设置。现在以图1-5中的工字形轨道为例,其中,平行设置的两个轨道为第二轨道2,垂直连接在两个第二轨道2之间为第一轨道1,则加油机的本体可以采用下述方式进行水平移动,具体为:加油机的本体先在第一轨道1的带动作用下沿第二轨道2移动,直至移动至油箱口在该停靠车位所形成的坐标系的坐标点位置所对应的y值,停止第一轨道1相对于第二轨道移动;然后,再将加油机沿第一轨道1移动,直至移动至油箱口在该停靠车位所形成的坐标系的坐标点位置所对应的x值,则停止加油机的本体相对于第一轨道1移动,则,此时加油机的本体停止到油箱口的上方,以便于加油枪4能够通过下移运动至能够插入油箱口的位置。其中,第一轨道1和第二轨道可以设置为各种合理的装配方式,例如,加油系统还包括两个轨道电机15,其中一个轨道电机 15能够通过传动结构驱动第一轨道沿第二轨道移动,另一个轨道电机15能够通过传动结构驱动加油机的本体相对于第一轨道移动,并且两个轨道电机 15与控制单元电连接,以使得控制单元能够发出信号(即油箱口的坐标点位置)以控制相应地轨道电机15的运行。可以理解的是,为了使得加油站中的各个车位停靠的待加油车辆能够快速、及时加油,可以两个平行设置的第二轨道2之间设置多个第一轨道1,多个第一轨道可以划分为分别停止在第二轨道2的两端的两组以备用,等待加油车辆最终停靠在停靠车位后,位于第二轨道2两
端的两组第一轨道中没有阻挡的那一组可以快速沿第二轨道移动至该停靠车位处,节省了待加油车辆的排队时间;考虑到每个待加油车辆的油号信息不同,可以将每个第一轨道上安装有能够供应不同油号油液的多个加油机,以便于根据实际需求的不同进行选取,也可以将供应不同油号油液的多个加油机分别安装在不同的第一轨道下,根据需求移动安装于能够供应对应油号的加油机的第一轨道。当然,第一轨道1和第二轨道并不限定于上述的工字形轨道结构,可以采用各种合理的设计方式,只要能够将加油机的本体顺利移动至油箱口的上方即可。值得一提的是,控制单元根据油箱口的坐标点位置来控制加油机的本体沿水平方向移动,只要使得加油枪能够直接下降至待加油车辆的外轮廓之外的邻近所述油箱口的位置(例如,在外轮廓之外的20cm处)即可,例如,在第一种具体实施方式中,可以以加油机的本体与旋转臂节的连接处为基准进行控制;在第二种具体实施方式中,可以以加油机的本体与套管臂节的连接处为基准进行控制;在第三种具体实施方式中,可以以加油机中油管3的连接于所述本体的连接点周边的合适位置 (例如,第一轨道上的距离所述连接点合适距离的点)为基准进行控制的,这还需要以引导机构的具体设置方式以及实际需求为准。此外,为了使得车位规划更为紧凑,上述的车位可以为仅仅针对外轮廓尺寸参数接近的汽车进行规划的,也可以仅仅根据外轮廓尺寸参数几乎一致的运货大车进行规划,以得到呈直线型排列、大小一致的多个车位组成的一组车位,该一组车位所对应的多个加油机的油管的长度可以根据该一组车位所停靠的待加油车辆的油箱口设置高度(停靠在这一组车位上的待加油车辆的油箱口的高度几乎一致)合理设置,不会因为过长或过短而造成不必要的麻烦。
58.为了简化收费流程,所述加油系统包括计费单元和收费单元,所述计费单元设置为能够计算所述待加油车辆的加油费用并且将所述加油费用传递给所述收费单元,所述收费单元设置为能够根据所述加油费用进行收费。其中,计费单元可以采用现有立式加油机所采用的计费单元,可以根据油号信息来获取单价,并且能够计量加油量,进而通过单价和加油量来计算得到加油费用。其中,所述收费单元可以设置为各种合理形式,只要能够根据计费单元得到的加油费用进行收费即可。当然,加油系统可以设置显示屏,该显示屏可以与控制单元电连接,控制单元能够将计费单元的加油费用传递给显示屏并且在显示屏上显示出来,当然,显示屏还可以显示所加油品的单价以及加油量。进一步的,该加油系统还可以将该收费单元所收取的加油费用传递到电脑,以便于在该电脑上完善客户信息以备生成电子发票,当然,该电子发票可以发送至客户邮箱。
59.可以理解的是,所述加油系统包括安装在所述罩棚的报警单元,所述报警单元设置为能够监测所述报警单元周边的油气浓度值并且能够在所述油气浓度值超过预设值时发出警报信号,提高了加油站的安全防护。其中,报警单元可以为各种常规的加油站用报警器,报警信号可以为鸣笛、红灯等各种信号。
60.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于此。在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。但这些简单变型和组合同样应当视为本发明所公开的内容,均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。