本发明涉及一种自动开盖设备,尤其涉及一种宠物猫粮喂食用罐装食品盖自动开盖设备。
背景技术:
猫粮也称猫食,是宠物猫吃的食物的总称,一般注意营养均衡,能够保证猫咪日常对高等蛋白质及微量元素的需求,人们喂养猫咪的过程中需要先将猫粮罐打开,再将猫粮倒出,然后对宠物猫进行喂食,人们给猫粮罐开盖的方式一般为:人们手动向上拉动拉环,进而将猫粮罐的盖子扯开,如此需要花费人们较大的力气,尤其是在猫咪宠物店中,人工手动开盖费时费力且劳动强度大,另外人工手动开盖的过程中,若人们拉扯力度使用不当,容易造成开盖失败或瓶口崩坏的现象,崩坏的瓶口还有可能伤及人体。
专利申请cn111573583a,公开日为2020.08.25,公开了一种瓶装食品罐头的开盖装置,包括有底座、定位紧固机构、升降功能组件、底部卡座、第一定位螺杆、底部卡块、立柱、升降卡座和横柱等,通过将待开盖瓶体放置于底部与卡座之间,手动操作第一锁紧手柄,使得底部卡块相互之间相对方向或相反方向运动,通过拧动定位手柄带动定位螺栓转动,如此可实现升降卡座和进退卡座位置的调控,卡盖支架位于待开盖瓶体正上方,上部卡块对应瓶盖,手动操作第二锁紧手柄,可带动第二定位螺杆转动,使得上部卡块相对方向或相反方向运动,从而实现瓶盖的夹紧,随后人工操作手柄齿轮转动,从而带动卡盖组件转动,卡盖组件转动可实现瓶盖转动,从而实现打开瓶盖,然而该装置开盖结束后,不便于人们进行取料。
因此,需要研发和设计一种能够自动下压切割、自动夹紧且方便取料的宠物猫粮喂食用罐装食品盖自动开盖设备。
技术实现要素:
为了克服人工手动开盖不安全、费时费力且劳动强度大的缺点,本发明目的在于提供一种能够自动下压切割、自动夹紧且方便取料的宠物猫粮喂食用罐装食品盖自动开盖设备。
本发明的目的采用以下技术方案实现:
一种宠物猫粮喂食用罐装食品盖自动开盖设备,包括有底架、第一支撑架、支撑座、旋转刀架、送料机构和下压机构,底架上设有第一支撑架,底架上设有支撑座,支撑座上设有送料机构,底架上设有下压机构,下压机构与第一支撑架连接,下压机构上设有旋转刀架,旋转刀架位于支撑座上方。
优选地,支撑座上设有第一气缸,第一气缸上设有第一连接块,第一连接块上设有第一滑动杆,第一滑动杆与支撑座滑动式连接,第一滑动杆上设有推料架,推料架与支撑座滑动式连接。
优选地,第一支撑架上侧设有第二气缸,第二气缸底部设有第一下压块,底架上设有第二支撑架,第一下压块底部转动式设有第二滑动杆,第二滑动杆与第二支撑架滑动式连接,第二滑动杆与旋转刀架连接。
优选地,支撑座上设有两根第一固定架,第一固定架与第二支撑架连接,第一固定架内侧滑动式设有第三滑动杆,第三滑动杆内侧设有夹紧块,第三滑动杆上绕有第一弹簧,第一弹簧连接在夹紧块与第一固定架之间。
优选地,第二支撑架上部内侧滑动式设有齿条,齿条顶部设有把手,齿条与第二支撑架之间连接有第二弹簧,第二滑动杆上部设有齿轮,齿轮与齿条配合,第二滑动杆上部绕有扭力弹簧,扭力弹簧连接在齿轮与第一下压块之间。
优选地,第一下压块上设有两块第二下压块,第二下压块下部内侧滑动式设有弹性组件,弹性组件底部设有第一楔形块,第三滑动杆外侧设有第二楔形块,第一楔形块与第二楔形块配合。
优选地,第二支撑架上设有第二固定架,第二固定架上部内侧滑动式设有拉杆,拉杆上设有磁铁块。
优选地,第二固定架的材料为合金。
相比现有技术,本发明的有益效果在于:
1、本发明通过设有送料机构,送料机构运转使猫粮罐向前移动至旋转刀架正下方,旋转刀架再对其进行开盖,达到了自动送料的效果;
2、本发明通过设有下压机构和旋转机构,旋转机构运转带动下压机构运转,使得旋转刀架向下移动并转动,从而对猫粮罐的盖子进行切割,达到了自动下压切割的效果;
3、本发明通过设有夹紧机构和挤压机构,挤压机构运转带动夹紧机构运转,进而将猫粮罐夹紧,达到了自动夹紧的效果,如此能够防止猫粮罐随意晃动,进而能够提高旋转刀架切割盖子的精准度;
4、本发明通过设有吸料机构,吸料机构运转并将猫粮罐吸住,然后将已开盖的猫粮罐拉出,人们再将其取下,如此方便人们进行取料。
附图说明
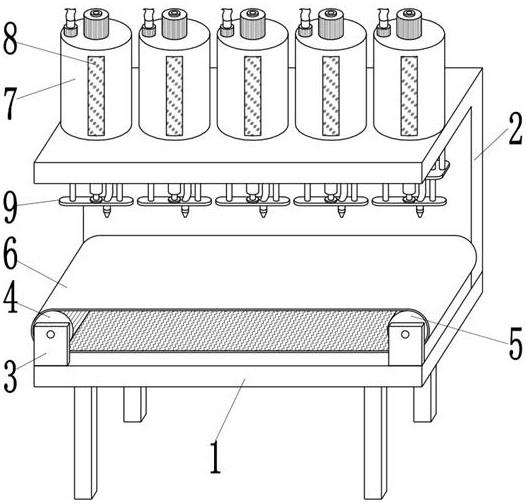
图1为本发明立体结构示意图。
图2为本发明送料机构的立体结构示意图。
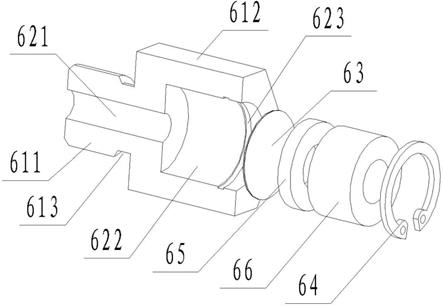
图3为本发明下压机构的立体结构示意图。
图4为本发明夹紧机构的立体结构示意图。
图5为本发明旋转机构的立体结构示意图。
图6为本发明挤压机构的立体结构示意图。
图7为本发明吸料机构的立体结构示意图。
其中,上述附图包括以下附图标记:1、底架,2、第一支撑架,3、支撑座,4、旋转刀架,5、送料机构,51、第一气缸,52、第一连接块,53、第一滑动杆,54、推料架,6、下压机构,61、第二气缸,62、第一下压块,63、第二滑动杆,64、第二支撑架,7、夹紧机构,71、第一固定架,72、第三滑动杆,73、第一弹簧,74、夹紧块,8、旋转机构,81、把手,82、齿条,83、第二弹簧,84、齿轮,85、扭力弹簧,9、挤压机构,91、第二下压块,92、弹性组件,93、第一楔形块,94、第二楔形块,10、吸料机构,101、第二固定架,102、磁铁块,103、拉杆。
具体实施方式
下面,结合附图以及具体实施方式,对本发明做进一步描述:
如图1-7所示的一种宠物猫粮喂食用罐装食品盖自动开盖设备,包括有底架1、第一支撑架2、支撑座3、旋转刀架4、送料机构5、第一气缸51、第一连接块52、第一滑动杆53、推料架54、下压机构6、第二气缸61、第一下压块62、第二滑动杆63、第二支撑架64、夹紧机构7、第一固定架71、第三滑动杆72、第一弹簧73、夹紧块74、旋转机构8、把手81、齿条82、第二弹簧83、齿轮84、扭力弹簧85、挤压机构9、第二下压块91、弹性组件92、第一楔形块93、第二楔形块94、吸料机构10、第二固定架101、磁铁块102和拉杆103,底架1上后部设有第一支撑架2,底架1上设有支撑座3,支撑座3上设有送料机构5,底架1上前部设有下压机构6,下压机构6与第一支撑架2连接,下压机构6上设有旋转刀架4,旋转刀架4位于支撑座3上方。
当人们需要对猫粮罐进行开盖时,首先人们将猫粮罐放在送料机构5中,然后使送料机构5运转,进而使猫粮罐向前移至旋转刀架4正下方,同时人们使下压机构6运转,使得旋转刀架4向下移动并转动,从而对猫粮罐的盖子进行切割,达到了自动开盖的目的,随后下压机构6使旋转刀向上移回原位,人们再取出已开盖的猫粮罐,然后送料机构5恢复原位,待猫粮罐的开盖工作完成后,人们使送料机构5与下压机构6停止运转,使得旋转刀架4停止运动,若再次使用本设备,重复上述步骤即可。
作为一个优选的实施方式,支撑座3底侧后部设有第一气缸51,第一气缸51后侧设有第一连接块52,第一连接块52前侧设有第一滑动杆53,第一滑动杆53与支撑座3滑动式连接,第一滑动杆53前侧设有推料架54,推料架54与支撑座3滑动式连接。
作为一个优选的实施方式,第一支撑架2上侧设有第二气缸61,第二气缸61底部设有第一下压块62,底架1上前侧设有第二支撑架64,第一下压块62底部转动式设有第二滑动杆63,第二滑动杆63与第二支撑架64滑动式连接,第二滑动杆63与旋转刀架4连接。
作为一个优选的实施方式,支撑座3左右两侧前部均设有第一固定架71,第一固定架71与第二支撑架64连接,第一固定架71内侧滑动式设有第三滑动杆72,第三滑动杆72内侧设有夹紧块74,第三滑动杆72上绕有第一弹簧73,第一弹簧73连接在夹紧块74与第一固定架71之间。
作为一个优选的实施方式,第二支撑架64上部内侧滑动式设有齿条82,齿条82顶部右侧设有把手81,齿条82左侧与第二支撑架64之间连接有第二弹簧83,第二滑动杆63上部设有齿轮84,齿轮84与齿条82配合,第二滑动杆63上部绕有扭力弹簧85,扭力弹簧85连接在齿轮84与第一下压块62之间。
作为一个优选的实施方式,第一下压块62左右两侧均设有第二下压块91,第二下压块91下部内侧滑动式设有弹性组件92,弹性组件92底部设有第一楔形块93,弹性组件92由一根滑杆与一根压缩弹簧组成,滑杆滑动式连接在第二下压块91内侧,滑杆底部与第一楔形块93连接,压缩弹簧绕在滑杆上,压缩弹簧连接在第二下压块91与第一楔形块93之间,第三滑动杆72外侧设有第二楔形块94,第一楔形块93与第二楔形块94配合。
作为一个优选的实施方式,第二支撑架64前侧下部设有第二固定架101,第二固定架101上部内侧滑动式设有拉杆103,拉杆103后侧设有磁铁块102。
人们将猫粮罐放在推料架54上,然后打开第一气缸51,第一气缸51运作使第一连接块52向前移动,继而使第一滑动杆53向前移动,使得推料架54向前移动,从而将猫粮罐推至旋转刀架4正下方,达到了自动送料的目的,待猫粮罐开盖结束后,第一气缸51继续运作,使得推料架54移回原位,待猫粮罐的开盖工作完成后,人们关闭第一气缸51,使得推料架54停止移动。
人们打开第二气缸61,第二气缸61运作使第一下压块62向下移动,进而使第二滑动杆63在第二支撑架64内向下滑动,使得旋转刀架4向下移动,直至插进猫粮罐中,人们再手动转动第二滑动杆63,进而使旋转刀架4转动,从而对猫粮罐的盖子进行切割,如此达到了自动下压切割的目的,待猫粮罐开盖结束后,人们使旋转刀架4与第二滑动杆63停止转动,同时第二气缸61继续运作,使得旋转刀架4与第一下压块62移回原位,待猫粮罐的开盖工作完成后,人们关闭第二气缸61,使得旋转刀架4停止移动。
当猫粮罐移至旋转刀架4下方时,人们手动使第三滑动杆72向内侧移动,继而使夹紧块74向内侧移动,第一弹簧73被拉伸,夹紧块74移动并将猫粮罐夹紧,如此能够防止猫粮罐随意晃动,进而能够提高旋转刀架4切割盖子的精准度,待猫粮罐开盖结束后,人们松开第三滑动杆72,第一弹簧73复位,使得第三滑动杆72与夹紧块74移回原位,然后人们取出已开盖的猫粮罐。
当旋转刀架4向下移动并逐渐插进猫粮罐中时,人们手动向右拉动把手81,进而使齿条82向右移动,第二弹簧83被拉伸,当齿条82移至与齿轮84啮合后,齿条82移动使齿轮84转动,扭力弹簧85被压缩,进而使第二滑动杆63转动,使得旋转刀架4转动,从而对猫粮罐进行开盖,待猫粮罐开盖结束后,人们松开把手81,第二弹簧83复位,使得齿条82移回原位,同时扭力弹簧85复位,使得旋转刀架4转回原位,如此操作较为安全。
第一下压块62下移会带动第二下压块91向下移动,进而使弹性组件92向下移动,继而使第一楔形块93向下移动,从而使第二楔形块94向内侧移动,使得第三滑动杆72向内侧移动,进而使夹紧块74向内侧移动,从而将猫粮罐夹紧,如此达到了自动夹紧的目的,当第二楔形块94与夹紧块74不能继续移动时,第一下压块62继续下移,使得第一楔形块93向上移动一小段距离,同时弹性组件92被压缩,待猫粮罐开盖结束后,第一下压块62带动第二下压块91向上移回原位,弹性组件92复位,使得第一楔形块93移回原位,随后第一弹簧73使第二楔形块94与夹紧块74移回原位,如此达到了自动夹紧的目的。
当未开盖的猫粮罐向前移至与磁铁块102接触时,由于磁铁块102与猫粮罐之间的吸引力,使得磁铁块102吸住猫粮罐,待猫粮罐完成开盖后,人们手动向前拉动拉杆103,继而使磁铁块102向前移动,使得已开盖的猫粮罐在第二固定架101上向前滑动,然后人们将已开盖的猫粮罐取下,随后使磁铁块102与拉杆103移回原位。
对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。