1.本发明涉及一种高炉泥炮加泥机器人及方法,属于机器人技术领域。
背景技术:
2.目前高炉炮泥普遍采用吊车、输送带或轨道式小车运输炮泥,然后采用人工或人工辅助机械手进行投料;且该岗位属于高温、高粉尘、高危险等作业环境,属于炉前综合条件最差的苦脏累险岗位之一,很难吸引年轻职工到该岗位工作。一次泥炮装泥过程,需要将约50块炮泥(7.5
‑
10kg/块)运输至泥炮待机位置,装泥过程需要人工辅助来回操作3
‑
6次活塞杆挤压泥缸,直至加满为止;现有加泥方式存在设备占地面积大,影响炉前操作和环保效果,且加泥时间长,效率较低,劳动强度大。
技术实现要素:
3.本发明目的是提供一种高炉泥炮加泥机器人及方法,在无工作指令时,可自主完成炮泥斗装料并进行自主充电;在收到上位机或人工加泥指令,自主进行定位、导航运动到泥炮位置,并自主识别加泥口完成加泥、打泥等全套动作,解放劳动力,降低人工成本,提高工人的安全指数,产生良好的经济效益和社会效益,解决了背景技术中存在的上述问题。
4.本发明的技术方案是:一种高炉泥炮加泥机器人,包含履带式底盘、机器人驱动电机、信息处理单元、机器人电源、载重支撑机构、避障传感器、双目视觉传感器、16线激光雷达、无线收发装置、6自由度协作机械臂、辅助视觉传感器、机械爪和炮泥斗,所述信息处理单元安装于履带式底盘的一侧,机器人驱动电机内嵌于履带式底盘的驱动轮端,载重支撑机构布于履带式底盘四角设置;机器人电源内嵌于履带式底盘从动轮一端,直接与机器人驱动电机、信息处理单元、载重支撑机构和6自由度协作机械臂连接并提供电源;避障传感器均匀布置于履带式底盘四周上边缘,双目视觉传感器通过支架安装于履带式底盘车头,16线激光雷达和无线收发装置通过支架安装于履带式底盘上;6自由度协作机械臂通过螺栓固定于履带式底盘上,辅助视觉传感器固定于6自由度协作机械臂端部,机械爪与6自由度协作机械臂连接,炮泥斗通过焊接固定于履带式底盘上部;机器人驱动电机、避障传感器、双目视觉传感器、16线激光雷达、无线收发装置和辅助视觉传感器分别与信息处理单元连接。
5.还包含急停按钮,设置在信息处理单元上。
6.所述炮泥斗采用网格式布置。
7.还包含充电接口,设置在履带式底盘的尾端,充电接口与机器人电源连接。
8.一种高炉泥炮加泥机器人使用方法,采用上述加泥机器人,包含如下步骤:履带式底盘接收来自信息处理单元的前进、后退、转向等运动指令;信息处理单元通过无线收发装置接收与发送数据;机器人驱动电机接收来自于信息处理单元的正反转指令,通过编码器将转动信息反馈至信息处理单元;机器人电源为机器人提供48v电源系统,并通过充电接口进行外部充电;载重支撑机构用于机器人在装料与投料时使履带式底盘水
平自稳;避障传感器用于机器人运动过程中,感知四周环境是否有障碍物,并直接与信息处理单元连接;双目视觉传感器用于检测障碍物的形状、距离,以便机器人顺利避障;16线激光雷达实时扫描,通过信息处理单元自主建图、定位与导航;6自由度协作机械臂与机械爪连接,并通过固定于机械臂上的辅助视觉传感器,将炮泥从炮泥存储区抓放至炮泥斗或抓放泥炮至加泥口;炮泥斗采用网格式布置,以便辅助视觉传感器计算、查找与定位。
9.本发明的有益效果是:在无工作指令时,可自主完成炮泥斗装料并进行自主充电;在收到上位机或人工加泥指令,自主进行定位、导航运动到泥炮位置,并自主识别加泥口完成加泥、打泥等全套动作,解放劳动力,降低人工成本,提高工人的安全指数,产生良好的经济效益和社会效益。
附图说明
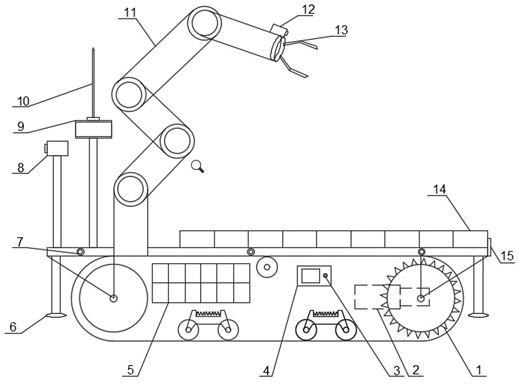
10.图1是本发明的结构示意图;图2是本发明炮泥斗俯视图;图中:履带式底盘1、机器人驱动电机2、急停按钮3、信息处理单元4、机器人电源5、载重支撑机构6、避障传感器7、双目视觉传感器8、16线激光雷达9、无线收发装置10、6自由度协作机械臂11、辅助视觉传感器12、机械爪13、炮泥斗14、充电接口15。
具体实施方式
11.为了使本发明实施案例的目的、技术方案和优点更加清楚,下面将结合实施案例中的附图,对本发明实施案例中的技术方案进行清晰的、完整的描述,显然,所表述的实施案例是本发明一小部分实施案例,而不是全部的实施案例,基于本发明中的实施案例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施案例,都属于本发明保护范围。
12.一种高炉泥炮加泥机器人,包含履带式底盘1、机器人驱动电机2、信息处理单元4、机器人电源5、载重支撑机构6、避障传感器7、双目视觉传感器8、16线激光雷达9、无线收发装置10、6自由度协作机械臂11、辅助视觉传感器12、机械爪13和炮泥斗14,所述信息处理单元4安装于履带式底盘1的一侧,机器人驱动电机2内嵌于履带式底盘1的驱动轮端,载重支撑机构6布于履带式底盘1四角设置;机器人电源5内嵌于履带式底盘1从动轮一端,直接与机器人驱动电机2、信息处理单元4、载重支撑机构6和6自由度协作机械臂11连接并提供电源;避障传感器7均匀布置于履带式底盘1四周上边缘,双目视觉传感器8通过支架安装于履带式底盘1车头,16线激光雷达9和无线收发装置10通过支架安装于履带式底盘1上;6自由度协作机械臂11通过螺栓固定于履带式底盘1上,辅助视觉传感器12固定于6自由度协作机械臂11端部,机械爪13与6自由度协作机械臂11连接,炮泥斗14通过焊接固定于履带式底盘1上部;机器人驱动电机2、避障传感器7、双目视觉传感器8、16线激光雷达9、无线收发装置10和辅助视觉传感器12分别与信息处理单元4连接。
13.还包含急停按钮3,设置在信息处理单元4上。
14.所述炮泥斗14采用网格式布置。
15.还包含充电接口15,设置在履带式底盘1的尾端,充电接口15与机器人电源5连接。
16.在实际应用中,履带式底盘1主要接收来自信息处理单元4的前进、后退、转向等运
动指令;信息处理单元4通过无线收发装置10接收与发送数据;机器人驱动电机2接收来自于信息处理单元4的正反转指令,通过编码器将转动信息反馈至信息处理单元4;机器人电源5为机器人提供48v电源系统,并通过充电接口15进行外部充电;载重支撑机构6用于机器人在装料与投料时使履带式底盘1水平自稳;避障传感器7主要用于机器人运动过程中,感知四周环境是否有障碍物,并直接与信息处理单元4连接;双目视觉传感器8主要用于检测障碍物的形状、距离,以便机器人顺利避障;16线激光雷达9可实时扫描,通过信息处理单元4自主建图、定位与导航;6自由度协作机械臂11与机械爪13连接,并通过固定于机械臂上的辅助视觉传感器12,将炮泥从炮泥存储区抓放至炮泥斗14或抓放泥炮至加泥口;炮泥斗14采用网格式布置,以便辅助视觉传感器12计算、查找与定位。
17.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种高炉泥炮加泥机器人,其特征在于:包含履带式底盘(1)、机器人驱动电机(2)、信息处理单元(4)、机器人电源(5)、载重支撑机构(6)、避障传感器(7)、双目视觉传感器(8)、16线激光雷达(9)、无线收发装置(10)、6自由度协作机械臂(11)、辅助视觉传感器(12)、机械爪(13)和炮泥斗(14),所述信息处理单元(4)安装于履带式底盘(1)的一侧,机器人驱动电机(2)内嵌于履带式底盘(1)的驱动轮端,载重支撑机构(6)布于履带式底盘(1)四角设置;机器人电源(5)内嵌于履带式底盘(1)从动轮一端,直接与机器人驱动电机(2)、信息处理单元(4)、载重支撑机构(6)和6自由度协作机械臂(11)连接并提供电源;避障传感器(7)均匀布置于履带式底盘(1)四周上边缘,双目视觉传感器(8)通过支架安装于履带式底盘(1)车头,16线激光雷达(9)和无线收发装置(10)通过支架安装于履带式底盘(1)上;6自由度协作机械臂(11)通过螺栓固定于履带式底盘(1)上,辅助视觉传感器(12)固定于6自由度协作机械臂(11)端部,机械爪(13)与6自由度协作机械臂(11)连接,炮泥斗(14)通过焊接固定于履带式底盘(1)上部;机器人驱动电机(2)、避障传感器(7)、双目视觉传感器(8)、16线激光雷达(9)、无线收发装置(10)和辅助视觉传感器(12)分别与信息处理单元(4)连接。2.根据权利要求1所述的一种高炉泥炮加泥机器人,其特征在于:还包含急停按钮(3),设置在信息处理单元(4)上。3.根据权利要求1所述的一种高炉泥炮加泥机器人,其特征在于:所述炮泥斗(14)采用网格式布置。4.根据权利要求1所述的一种高炉泥炮加泥机器人,其特征在于:还包含充电接口(15),设置在履带式底盘(1)的尾端,充电接口(15)与机器人电源(5)连接。5.一种高炉泥炮加泥机器人使用方法,采用权利要求1
‑
4任意一项加泥机器人,包含如下步骤:履带式底盘1接收来自信息处理单元4的前进、后退、转向等运动指令;信息处理单元4通过无线收发装置10接收与发送数据;机器人驱动电机2接收来自于信息处理单元4的正反转指令,通过编码器将转动信息反馈至信息处理单元4;机器人电源5为机器人提供48v电源系统,并通过充电接口15进行外部充电;载重支撑机构6用于机器人在装料与投料时使履带式底盘1水平自稳;避障传感器7用于机器人运动过程中,感知四周环境是否有障碍物,并直接与信息处理单元4连接;双目视觉传感器8用于检测障碍物的形状、距离,以便机器人顺利避障;16线激光雷达9实时扫描,通过信息处理单元4自主建图、定位与导航;6自由度协作机械臂11与机械爪13连接,并通过固定于机械臂上的辅助视觉传感器12,将炮泥从炮泥存储区抓放至炮泥斗14或抓放泥炮至加泥口;炮泥斗14采用网格式布置,以便辅助视觉传感器12计算、查找与定位。
技术总结
本发明涉及一种高炉泥炮加泥机器人及方法,属于机器人技术领域。本发明的技术方案是:辅助视觉传感器(12)固定于6自由度协作机械臂(11)端部,机械爪(13)与6自由度协作机械臂(11)连接,炮泥斗(14)通过焊接固定于履带式底盘(1)上部;机器人驱动电机(2)、避障传感器(7)、双目视觉传感器(8)、16线激光雷达(9)、无线收发装置(10)和辅助视觉传感器(12)分别与信息处理单元(4连)接。本发明的有益效果是:在无工作指令时,可自主完成炮泥斗装料并进行自主充电;在收到上位机或人工加泥指令,自主进行定位、导航运动到泥炮位置,并自主识别加泥口完成加泥、打泥等全套动作,解放劳动力,降低人工成本,提高工人的安全指数,产生良好的经济效益和社会效益。济效益和社会效益。济效益和社会效益。
技术研发人员:冯相印 甦震 刘景钧 王晓 刘士朝 田广才 武智猛 贾长亮 张彦青 马强 康亮 安贺顺 韩会峰 臧正超 王磊
受保护的技术使用者:河钢工业技术服务有限公司
技术研发日:2021.07.06
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

