技术特征:
1.一种灰库清理机器人,其特征在于,包括:
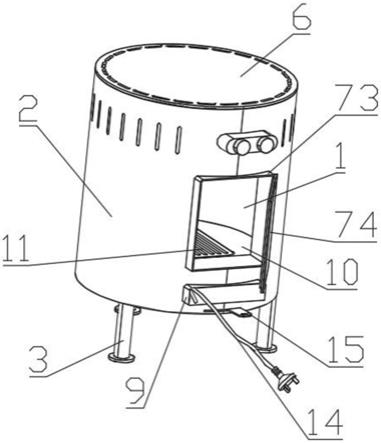
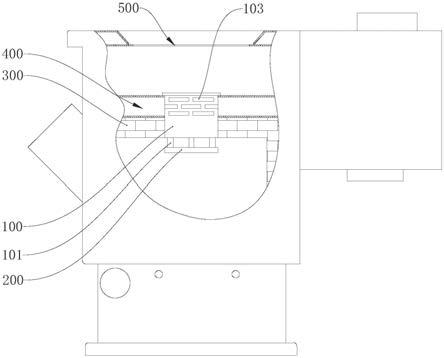
机器人本体,所述机器人本体的一端可拆卸连接于灰库(100)上,所述机器人本体包括互相连接的至少一个伸缩组件(1)和至少一个弯曲组件(2),所述伸缩组件(1)能够沿轴向伸缩,所述弯曲组件(2)能够轴向弯曲;
吸尘组件(3),所述吸尘组件(3)包括吸尘风机(31)、吸尘通管(32)和至少一个风扇机构(34),所述吸尘通管(32)的一端固定连接于所述吸尘风机(31)上,另一端穿过所述机器人本体,所述伸缩组件(1)能够带动所述吸尘通管(32)伸缩,所述弯曲组件(2)能够带动所述吸尘通管(32)弯曲,所述吸尘风机(31)通过所述吸尘通管(32)吸取所述灰库(100)内的灰尘;所述风扇机构(34)可拆卸连接于所述机器人本体远离所述灰库(100)库顶的另一端;以及
气源控制组件(4),所述气源控制组件(4)被配置为控制所述机器人本体进行伸缩或者弯曲。
2.根据权利要求1所述的灰库清理机器人,其特征在于,所述气源控制组件(4)包括:
真空泵(41),所述真空泵(41)固定连接于所述灰库(100)的库顶外部;
气泵(42),所述气泵(42)固定连接于所述灰库(100)的库顶外部;
进气通管(43),所述进气通管(43)的一端连通所述气泵(42),另一端穿过所述机器人本体,所述气泵(42)能够通过所述进气通管(43)注入气体;所述进气通管(43)能够使所述伸缩组件(1)轴向伸长,并能够使所述弯曲组件(2)轴向弯曲;
出气通管(44),所述出气通管(44)的一端连通所述真空泵(41),另一端穿过所述机器人本体,所述真空泵(41)能够通过所述出气通管(44)抽出气体;所述出气通管(44)能够使所述伸缩组件(1)轴向缩短,并能够使所述弯曲组件(2)轴向弯曲;以及
控制器(45),所述控制器(45)固定连接于所述灰库(100)的库顶外部。
3.根据权利要求2所述的灰库清理机器人,其特征在于,所述伸缩组件(1)包括:
上密封端盖一(11);
伸缩臂(12),所述伸缩臂(12)两端开口,包括第一波纹管(121)和第二波纹管(122),所述第一波纹管(121)套装于所述第二波纹管(122)外部,所述第一波纹管(121)和第二波纹管(122)之间形成第一气室,所述伸缩臂(12)的一端固定连接于所述上密封端盖一(11)上;
下密封端盖一(13),所述下密封端盖一(13)固定连接于所述伸缩臂(12)的另一端,所述上密封端盖一(11)和所述下密封端盖一(13)能够密封所述第一气室;
进气管(14),所述进气管(14)的一端连通所述进气通管(43),另一端连通所述第一气室;
进气电磁阀(15),所述进气电磁阀(15)被配置为控制所述进气管(14)的开闭,所述进气电磁阀(15)通讯连接所述控制器(45);
出气管(16),所述出气管(16)的一端连通所述出气通管(44),另一端连通所述第一气室;以及
出气电磁阀(17),所述出气电磁阀(17)被配置为控制所述出气管(16)的开闭,所述出气电磁阀(17)通讯连接所述控制器(45)。
4.根据权利要求3所述的灰库清理机器人,其特征在于,所述弯曲组件(2)包括:
弯曲臂(21),所述弯曲臂(21)的两端开口,并具有内腔;
隔离件(22),所述隔离件(22)设置于所述弯曲臂(21)的内腔并沿所述弯曲臂(21)的轴向延伸,所述隔离件(22)包括至少三个隔离板,至少三个所述隔离板将所述内腔分隔为至少三个第二气室,至少三个所述第二气室沿所述弯曲臂(21)的周向均匀分布;
上密封端盖二(23),所述上密封端盖二(23)固定连接于所述弯曲臂(21)的一端;
下密封端盖二(24),所述下密封端盖二(24)固定连接于所述弯曲臂(21)的另一端,所述下密封端盖二(24)和所述上密封端盖二(23)能够密封所述第二气室;
进气阀岛(25),所述进气阀岛(25)可拆卸连接于所述上密封端盖二(23)上,所述进气阀岛(25)被配置为控制所述进气通管(43)注入所述第二气室的气体容量;以及
出气阀岛(26),所述出气阀岛(26)可拆卸连接于所述上密封端盖二(23)上,所述出气阀岛(26)被配置为控制所述出气通管(44)从所述第二气室抽出的气体容量。
5.根据权利要求3所述的灰库清理机器人,其特征在于,所述上密封端盖一(11)包括第一进气通口(111)、第一出气通口(112)和第一吸尘通口(113),所述下密封端盖一(13)包括第二进气通口(131)、第二出气通口(132)和第二吸尘通口(133);所述进气通管(43)依次穿过所述第一进气通口(111)和所述第二进气通口(131),所述出气通管(44)依次穿过所述第一出气通口(112)和所述第二出气通口(132),所述第二波纹管(122)的两端分别连通所述第一吸尘通口(113)和所述第二吸尘通口(133),所述吸尘通管(32)穿过所述第二波纹管(122)。
6.根据权利要求4所述的灰库清理机器人,其特征在于,所述进气阀岛(25)包括:
第一进气孔(251),所述第一进气孔(251)连通所述进气通管(43);
至少三个第一出气孔(252),至少三个所述第一出气孔(252)的一端均连通所述第一进气孔(251),至少三个所述第一出气孔(252)的另一端分别连通至少三个所述第二气室;以及
第一总线接口(253),所述第一总线接口(253)通讯连接所述控制器(45)。
7.根据权利要求4所述的灰库(100)清理机器人,其特征在于,所述出气阀岛(26)包括:
第二出气孔(261),所述第二出气孔(261)连通所述出气通管(44);
至少三个第二进气孔(262),至少三个所述第二进气孔(262)的一端均连通所述第二出气孔(261),至少三个所述第二进气孔(262)的另一端分别连通至少三个所述第二气室;以及
第二总线接口(263),所述第二总线接口(263)通讯连接所述控制器(45)。
8.根据权利要求4所述的灰库清理机器人,其特征在于,所述上密封端盖二(23)包括第三进气通口(231)、第三出气通口(232)和第三吸尘通口(233),所述下密封端盖二(24)包括第四进气通口(241)、第四出气通口(242)和第四吸尘通口(243);所述隔离件(22)包括吸尘通孔(221);所述进气通管(43)依次穿过所述第三进气通口(231)和所述第四进气通口(241),所述出气通管(44)依次穿过所述第三出气通口(232)和所述第四出气通口(242),所述吸尘通管(32)依次穿过所述第三吸尘通口(233)、所述吸尘通孔(221)和所述第四吸尘通口(243)。
9.根据权利要求8所述的灰库清理机器人,其特征在于,所述机器人本体还包括:
库顶圆盘(5),所述库顶圆盘(5)的一端连接于所述灰库(100)的库顶外部,另一端连接于所述上密封端盖一(11)或所述上密封端盖二(23);
下密封端盖三(6),所述下密封端盖三(6)的一端固定连接于所述伸缩臂(12)远离所述上密封端盖一(11)的另一端或者所述弯曲臂(21)远离所述上密封端盖二(23)的另一端,所述下密封端盖三(6)包括连接孔,所述吸尘通管(32)连通所述连接孔;以及
吸尘罩(7),所述吸尘罩(7)固定连接于所述吸尘通管(32)远离所述吸尘风机(31)的另一端。
10.根据权利要求9所述的灰库清理机器人,其特征在于,所述风扇机构(34)包括:
连接法兰(341),所述连接法兰(341)可拆卸连接于所述下密封端盖三(6)上;
电机,所述电机固定连接于所述连接法兰(341)内;
转轴(342),所述转轴(342)可拆卸连接于所述电机,所述电机能带动所述转轴(342)转动;以及
扇叶(343),所述扇叶(343)固定连接于所述转轴(342)上,并能随所述转轴(342)旋转。
技术总结
本发明属于灰库清理技术领域,具体涉及一种灰库清理机器人,包括机器人本体、吸尘组件和气源控制组件。机器人本体一端可拆卸连接于灰库上,包括互相连接的至少一个伸缩组件和至少一个弯曲组件,伸缩组件能够沿轴向伸缩,弯曲组件能够轴向弯曲;吸尘组件包括吸尘风机、吸尘通管和至少一个风扇机构,吸尘通管一端固定连接于吸尘风机,另一端穿过机器人本体并能随伸缩组件伸缩、随弯曲组件弯曲;风扇机构可拆卸连接于机器人本体另一端;气源控制组件用于控制机器人本体进行伸缩或者弯曲。本发明的灰库清理机器人能实现机器人本体的伸缩和全向弯曲,并有效打散板结积灰,满足库内不同高度、不同方位的全面清理需求,清理作业快速、安全、全面。
技术研发人员:郭荣;范佳卿;林润达;臧剑南;汪勇;程卫国;李钟钦;张越;陈家颖
受保护的技术使用者:上海发电设备成套设计研究院有限责任公司
技术研发日:2021.05.20
技术公布日:2021.08.17
本文用于企业家、创业者技术爱好者查询,结果仅供参考。