一种p2插电式混合动力汽车电能分配方法
技术领域
1.本发明涉及混合动力汽车电能分配方法,具体涉及一种p2插电式混合动力汽车电能分配方法。
背景技术:
2.p2构型混合动力汽车由于其发动机与电机转速耦合的特点,进行转矩分配之前首先要决定工作模式,在车速较低、频繁启停的低速市区工况发动机转速也分布在较低的区域,该区域发动机效率低,因此应尽量工作在纯电动模式;在车速较高、转矩需求较大的中高速工况,益采用混合动力模式。制定合理的电能消耗曲线是进行模式决策的关键所在,电能消耗曲线直接决定了电能的分配和混合动力汽车的工作模式。目前,cn110696815a通过二层前馈神经网络规划soc轨迹,cn111923897a通过模糊神经网络规划soc消耗曲线,上述两种方法计算量大,无法根据实时工况的变动调整电能消耗曲线。cn110962837a将电量平均分配给预测行驶里程,但大多数里程都集中在高速工况,该方法并不能将电量分配给最需要用电的城市低速工况。cn111591279a公开了一种基于预测车速和道路坡度的车辆电池soc轨迹规划方法,该方法只能以单次出行路径进行soc规划,且不适用于坡道变化小的工况。
3.现有的发明电能分配方法依赖its和导航信息,在应its和导航信息缺失、更新不及时、信息误差、出行路径突然改变等情况时,优化效果不佳;且通过神经网络算法进行soc参考轨迹的制定计算量大,预测出来的轨迹不能实时调整。
技术实现要素:
4.针对上述现有技术存在的问题,本发明提供一种p2插电式混合动力汽车电能分配方法,该方法基于每一辆汽车自身的历史数据,通过长短期记忆网路算法求解当前用电周期内车辆行驶距离、各工况所占比例、各工况平均速度等关键特征参数,结合基于k均值聚类算法的工况识别技术,为不同工况制定用电优先级,引入电能透支参数在线求解不同工况下电能消耗曲线。通过以车速、需求转矩、soc偏移量为输入变量的模糊控制实现工作模式决策,通过等效燃油最小消耗策略完成混合动力模式下的转矩分配。该策略无需its和导航等互联网信息,不依赖详细的未来工况信息,能够在一个用电周期内实现近似全局最优电能分配。
5.本发明的方法是通过以下技术方案实现的:一种p2插电式混合动力汽车电能分配方法,包括以下步骤:(1)在车辆完成上一个用电周期后,基于车辆的历史行驶数据,通过长短期记忆网络计算车辆行驶关键参数,作为当前用电周期车辆行驶关键参数;(2)在车辆行驶过程中,通过工况识别技术,在线识别当前行驶工况;(3)通过当前用电周期车辆行驶关键参数,求解当前行驶工况下的电能消耗曲线;(4)基于当前行驶工况下的电能消耗曲线和当前时刻车辆行驶参数,通过模糊控
制器在线实时决策车辆工作模式;(5)如果步骤(4)输出的车辆工作模式为混合动力模式,通过自适应等效燃油最小消耗策略进行转矩分配;否则由电机输出全部需求转矩。
6.进一步的,步骤(1)中上一个用电周期表示从上一次使用充电桩将电池电量充至一定数值开始,到本次使用充电桩将电池电量充到一定数值结束,这段时间所经历的行驶过程。
7.进一步的,步骤(1)中车辆行驶关键参数包括车辆行驶里程s
pre
、市区工况所占行驶里程的比例pct
low
、城郊工况所占行驶里程的比例pct
mid
、高速工况所占行驶里程的比例pct
high
、市区工况平均速度v
low
、市区工况车辆所需平均功率p
low
。
8.进一步的,步骤(2)中所述工况识别技术包含以下步骤:(21)选取车辆在行驶典型工况时的需求转矩和车速作为聚类参数并对其进行标准化处理,通过加权k均值聚类算法,以曼哈顿距离作为临近度函数将标准化的参数聚成三类;(22)将步骤(21)得到的三类数据的三个聚类中心去标准化,以需求转矩和速度为依据,按数值从小到大将三个聚类中心定义为市区工况、城郊工况、高速工况;(23)在行驶过程中计算当前需求转矩、车速与步骤(22)中所述三个聚类中心之间的曼哈顿距离,选取曼哈顿距离最小的聚类中心所表征的工况作为当前行驶工况。
9.进一步的,步骤(3)中,求解当前行驶工况下的电能消耗曲线依次包含以下步骤:(31)市区工况为最高用电优先级;城郊工况和高速工况的用电、发电优先级相同;(32)根据步骤(1)中获取的当前用电周期车辆行驶关键参数,计算电能透支参数的初始值,式中为初始soc,为电池开路电压平均值,为电池容量;(33)求解当前行驶工况下的电能消耗曲线:当步骤(2)中当前行驶工况为市区工况时,电能消耗曲线计算公式为:,式中k表示当前时刻,k 1表示下一个时刻,时刻与时刻之间的计算步长为10毫秒,为当前用电周期内行驶里程,电驱动系统平均效率;当步骤(2)中当前行驶工况为城郊工况时,电能消耗曲线计算公式为:,式中为城郊工况的行驶里程;当步骤(2)中当前行驶工况为高速工况时,电能消耗曲线计算公式为:,式中为高速工况的行驶里程;
(34)更新电能透支参数,计算公式为:,式中为车速;每当步骤(2)识别的当前行驶工况发生改变时,返回到步骤(32)。
10.进一步的,步骤(4)中通过模糊控制器在线实时决策车辆工作模式包括以下步骤:(41)模糊控制器以当前soc与步骤(3)中求得的当前行驶工况下的电能消耗曲线之间的偏移量、当前需求转矩和当前车速三个参数作为输入变量,以工作模式作为输出变量,采用mamdani推理方法,采用加权平均法对输出变量去模糊化;(42)将步骤(41)中去模糊化后的输出变量作为模式切换的依据,配合滞环控制防止工作模式频繁切换。
11.进一步的,模糊规则的制定遵循以下原则:如果soc偏移小,则进入纯电动模式;如果soc偏移量大,则进入混合动力模式;如果需求转矩小,则进入纯电动模式;如果需求转矩大,则进入混合动力模式;如果当前车速小,则进入纯电动模式;如果当前车速大,则进入混合动力模式。
12.进一步的,步骤(5)中所述自适应等效燃油最小消耗策略包含以下特征:(51)等效燃油最小消耗策略的等效因子通过pid控制进行实时调整;(52)以当前soc与步骤(3)中求得的当前行驶工况下的电能消耗曲线之间的偏移量作为步骤(51)中pid控制器的输入变量。
13.本发明的有益效果:本发明的p2插电式混合动力汽车电能分配方法,可以根据车辆历史信息求解当前用电周期内行驶特征参数,不需要提前预知工况和使用复杂的优化控制算法,只需在出行前进行一次计算,可以实现对每台汽车单独优化。电能消耗曲线可以根据当前行驶状态在线实时修正,进而决定电能的分配和混合动力汽车的工作模式,计算量小、鲁棒性强、灵活度高,能较好的实现实车批量应用。
附图说明
14.图1为本发明方法的系统流程图。
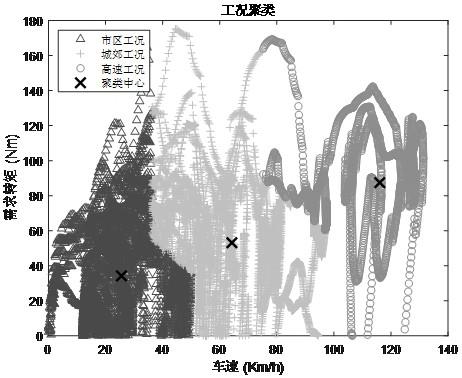
15.图2为本发明实施例的wltc下的工况聚类图。
16.图3为试验工况下的工况识别效果。
17.图4为试验工况下soc
target
及实际soc变化图。
具体实施方式
18.下面将结合实施例,对本发明的技术方案进行详细说明。
19.需要指出的是,本发明对于所有p2架构(包括基于at、dct、cvt、amt的p2构型)的混合动力汽车均可适用,下面以某基于at变速器的p2混合动力汽车为例进行详细说明。
20.本发明提供一种p2插电式混合动力汽车电能分配方法,如图1所示,包括以下步
骤:(1)在车辆完成上一个用电周期后,基于车辆的历史行驶数据,通过长短期记忆网络计算当前用电周期车辆行驶关键参数。上一个用电周期表示从上一次使用充电桩将电池电量充至一定数值开始,到本次使用充电桩将电池电量充到一定数值结束,这段时间所经历的行驶过程。例如,上一次使用充电桩将电池电量从20%充至100%,在完成上次行驶后,电池电量还剩余30%,此时通过充电桩将电池电量充至50%并停止充电,即完成了上一个用电周期。在车辆本次启动点火开关后,启动hcu(hybrid controlunit)中的长短期记忆网络模型,以储存在hcu存储设备中的车辆历史数据,求解当前用电周期车辆行驶关键参数。以某次实验数据为例,求得车辆行驶里程s
pre
=140km、市区工况所占行驶里程的比例pct
low
=0.23、城郊工况所占行驶里程的比例pct
mid
=0.40、高速工况所占行驶里程的比例pct
high
=0.37、市区工况平均速度v
low
=26.9km/h、市区工况车辆所需平均功率p
low
=3.25kw。
21.(2)在车辆行驶过程中,通过工况识别技术,在线识别当前行驶工况。首先在离线情况下,选取车辆在行驶典型工况时的需求转矩和车速作为聚类参数并对其进行标准化处理,本案例以市区、城郊和高速工况特征明显的wltc(worldwide harmonized light vehicles test cycle)工况作为典型工况,在车辆行驶wltc工况时记录需求转矩和车速的变化数据,并对其进行标准化处理,通过加权k均值聚类算法,以曼哈顿距离作为临近度函数将标准化的参数聚成三类,如图2所示,将得到的三类数据的三个聚类中心去标准化,以速度和需求转矩为依据,从小到大将三个聚类中心定义为市区工况(25.56,34.25)、城郊工况(64.26,53.16)、高速工况(116.07,87.47)。在行驶过程中计算当前需求转矩、车速与三个聚类中心之间的曼哈顿距离,选取曼哈顿距离最小的聚类中心所表征的工况作为当前工况。试验工况下的工况识别效果如图3所示,图中1、2、3分别表示市区、城郊和高速工况。
22.(3)通过步骤(1)中计算出的当前用电周期车辆行驶关键参数,求解当前行驶工况下的电能消耗曲线。
23.以市区工况为最高用电优先级,城郊工况和高速工况的用电、发电优先级相同。市区工况优先用电,城郊工况和高速工况根据剩余电量是否满足城市工况的使用需求,决定是否发电。根据步骤(1)中获取的车辆行驶关键参数,计算电能透支参数的初始值,本案例式中为初始soc。当步骤(2)中当前行驶工况为市区工况时,电能消耗曲线计算公式为:,式中k表示当前时刻,k 1表示下一个时刻,时刻与时刻之间的计算步长为10毫秒,为当前用电周期内行驶里程,为电池开路电压平均值,电驱动系统平均效率,为电池容量。当步骤(2)中工况识别程序识别到当前行驶工况为城郊工况时,电能消耗曲线计算公式为:
,式中为城郊工况的行驶里程;当步骤(2)中工况识别程序识别到当前行驶工况为高速工况时,电能消耗曲线计算公式为:,式中为高速工况的行驶里程,最后更新电能透支参数,计算公式为:,式中为车速。每当工况识别程序输出的行驶工况更换时,在线更新和,直到行程结束。试验工况下的电能消耗曲线如图4所示。
24.(4)基于步骤(3)中求解出的电能消耗曲线和当前时刻车辆行驶参数,通过模糊控制器在线实时决策车辆工作模式。模糊控制器以当前soc与步骤(3)中求得的之间的偏移量、当前需求转矩和当前车速三个参数作为输入变量,其中输入变量soc之间的偏移量的论域为[0,12]、需求转矩的论域为[0,380]、当前车速的论域为[0,200],三个输入变量的模糊论域均为e=[0,1],模糊子集均为{l,m,h},l表示输入变量小,m表示输入变量中等,h表示输入变量大,所选取的隶属度函数全部为高斯型隶属度函数。输出变量车辆工作模式的论域为[0,1],模糊论域为e=[0,1],所对应的模糊子集为{ev,hev}, ev表示纯电动模式,hev表示混合动力模式,所选取的隶属度函数为高斯型隶属度函数,采用加权平均法对输出变量去模糊化。模糊规则的制定遵循以下原则:如果soc偏移小,则进入纯电动模式;如果soc偏移量大,则进入混合动力模式;如果需求转矩小,则进入纯电动模式;如果需求转矩大,则进入混合动力模式;如果当前车速小,则进入纯电动模式;如果当前车速大,则进入混合动力模式,采用mamdani推理方法。将去模糊化后的输出变量作为模式切换的依据,配合滞环控制,具体地,当输出变量大于0.8时进入混合动力模式,当输出变量小于0.35时进入纯电动模式,防止工作模式频繁切换。
[0025]
(5)如果步骤(4)输出的工作模式为混合动力模式,通过自适应等效燃油最小消耗策略进行转矩分配,以当前soc与步骤(3)中求得的之间的偏移量作为pid控制器的输入变量,等效燃油最小消耗策略的等效因子通过pid控制进行实时调整。如果步骤(4)输出的工作模式为纯电动模式,由电机输出全部需求转矩。
[0026]
以上已经对本发明的各个实施例的结构进行了详细的说明,同时对本发明的控制系统所采用的控制方法进行了说明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述所述技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术对以上实施例所做的任何改动修改、等同变化及修饰,均属于本技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
