一种基于empc的燃料电池混合动力系统控制方法
技术领域
1.本发明涉及燃料电池混合动力系统控制技术领域,具体公开了一种基于empc的燃料电池混合动力系统控制方法。
背景技术:
2.为了减少对化石燃料的依赖,近年来,交通领域中的混合动力技术和电动车辆受到了高度关注。内燃机的低效率和较高的环境污染使得汽车制造商开始逐渐关注电动动力总成。
3.由于燃料电池输出特性不足,当负载需求急剧变化时,如果仅由燃料电池提供功率需求,将对燃料电池的性能和寿命造成恶劣影响。为了避免这种情况,可以采用多电源混合动力系统,并且可以消除尖峰,使系统可以获得平稳的输出电压。目前,燃料电池和辅助能量存储系统组成的混合动力模式有燃料电池和动力电池或超级电容组成的双能量源结构以及燃料电池、动力电池和超级电容器组成的三能量源结构。由于其结构的多样性和复杂性,因此控制策略的设计变得尤为重要。
4.燃料电池混合动力系统,顾名思义,其有多个能量源,因此系统运行期间如何合理地实现功率分配是一个关键问题,而由于燃料电池混合动力系统存在结构复杂、响应迟缓等问题,现有的控制方法不能很好使每个能量源都能发挥各自的优势,导致系统的功率分配不合理、效率低、能量损耗高等问题。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种基于empc的燃料电池混合动力系统控制方法,以解决现有技术中燃料电池混合动力系统中由于各能量源无法发挥各自的优势,导致系统的功率分配不合理、效率低、能量损耗高等问题。
6.为达到上述目的,本发明提供如下技术方案:
7.一种基于empc的燃料电池混合动力系统控制方法,包括以下步骤:
8.s1:基于pemfc系统和锂电池建立燃料电池混合动力系统,并对所述燃料电池混合动力系统模型进行建模;
9.s2:基于所述燃料电池混合动力系统模型,构建empc预测控制系统并设定所述empc预测控制系统目标函数和约束条件;
10.s3:根据所述empc预测控制系统及其目标函数和约束条件,构建多参数二次规划问题,并求解多参数二次规划问题,得到empc预测控制系统的最优输入变量,优化pemfc系统与锂电池的功率分配,实现燃料电池混合动力系统的控制。
11.进一步的,在步骤s1中,所述燃料电池混合动力系统包括pemfc系统、dc/dc转换器、锂电池和负载,所述pemfc系统通过所述dc/dc转换器连接到功率总线后再与负载连接,所述pemfc系统用于将电化学反应产生的电能传输给dc/dc转换器,以驱动负载,所述dc/dc转换器用于调节pemfc系统的输出电流来实现pemfc系统与锂电池之间的功率分配;所述锂
电池连接到功率总线后与负载连接,所述锂电池用于作为辅助动力源,为负载提供动力。
12.进一步的,在步骤s1中,在对所述燃料电池混合动力系统进行建模时,针对所述pemfc系统、dc/dc转换器和锂电池分别进行建模,其具体包括:
13.设定所述dc/dc转换器的基础参数,对所述dc/dc转换器进行建模,得到dc/dc转换器的静态模型:
14.η
dc
=a
dc
p
fc5
‑
b
dc
p
fc4
c
dc
p
fc3
‑
d
dc
p
fc2
e
dc
p
fc
f
dc
;
15.其中:η
dc
为dc/dc转换器的输出效率;a
dc
,b
dc
,c
dc
,d
dc
,e
dc
,f
dc
分别为dc/dc转换器静态模型的模型系数;p
fc
为pemfc系统的点对的输出功率;
16.设定所述pemfc系统的基础参数,对pemfc系统进行建模:
[0017][0018]
其中:为pemfc系统中电堆反应消耗的氢气的摩尔质量;为pemfc系统中电堆的氢气低热值;为pemfc系统中的电堆效率;
[0019]
设定所述锂电池的基础参数,针对锂电池的荷电状态的变化情况,建立锂电池的充/放电模型:
[0020][0021]
其中:soc为锂电池的荷电状态;v0为锂电池的开路电压;r
bt
为锂电池的充/放电内阻;p
load
为负载需求功率;p
dc
为dc/dc转换器的输出功率;q
bt
为锂电池的电池容量。
[0022]
进一步的,所述步骤s2的具体步骤为:
[0023]
s201:设置所述燃料电池混合动力系统的状态变量和输入变量,构建empc预测控制模型,并设置负载需求功率为可测扰动项,将所述负载需求功率作为状态变量增广至所述empc预测控制模型中;
[0024]
s202:对增广后的empc预测控制模型进行离散化处理,得到最终的empc预测控制系统;
[0025]
s203:构建所述empc预测控制系统的目标函数和约束条件。
[0026]
进一步的,在步骤s202中,所述empc预测控制系统为线性时不变离散时间系统,其表达式为:
[0027]
x(t 1)=ax(t) bu(t);
[0028]
其中:x(t)为empc预测控制系统当前时刻的状态变量,包括pemfc系统中电堆反应消耗的氢气的摩尔质量锂电池的核电状态soc以及负载需求功率p
load
;x(t 1)为empc预测控制系统下一时刻的状态变量;u(t)为empc预测控制系统当前时刻的输入变量,包括pemfc系统的输出功率p
fc
;a,b分别为empc预测控制系统的状态变量和输入变量所对应的系数矩阵。
[0029]
进一步的,在步骤s203中,所述目标函数可表示为:
[0030]
[0031]
其中:u为预测输出的输入变量序列;k为采样时刻,k=0,1,
…
,n;δx
k
为k时刻的状态增量;δu
k
为k时刻输入增量;q,s分别为状态增量和输入增量的权重系数;
[0032]
所述约束条件包括:
[0033]
x
min
≤x
k
≤x
max
;k=0,1,
…
,n;
[0034]
δu
min
≤δu
k
≤δu
max
;k=0,1,
…
,n;
[0035]
u
min
≤u
k
≤u
max
;k=0,1,
…
,n。
[0036]
进一步的,所述步骤s3的具体步骤为:
[0037]
s301:根据所述empc预测控制系统的线性时不变特性,基于所述empc预测控制系统及其目标函数,构建多参数二次规划问题;
[0038]
s302:对所述多参数二次规划问题进行简化,得到所述多参数二次规划问题的标准形式;
[0039]
s303:利用kkt条件对所述多参数二次规划问题的标准形式进行离线求解,求得所述empc预测控制系统的状态分区及对应的控制律,进而得到所述empc预测控制系统的显式控制模型;
[0040]
s304:在线查找所述状态变量对应的状态分区,利用所述显式控制模型计算得到最优输入变量序列,并将该最优输入变量序列作用于所述燃料电池混合动力系统中,调节pemfc系统与锂电池之间的功率分配,实现燃料电池混合动力系统的控制。
[0041]
进一步的,所述步骤s301中构建所述多参数二次规划问题的具体过程为:
[0042]
根据所述empc预测控制系统的线性时不变特性,计算得到t时刻empc预测控制系统基于多参数二次规划问题的状态变量x
e
(t)以及未来t时刻至t k
‑
1时刻empc预测控制系统假定的基于多参数二次规划问题的输入变量u
e
,根据假定的输入变量u
e
得到t时刻至t k时刻empc预测控制系统基于多参数二次规划问题的输入变量x
e
(t k):
[0043][0044]
其中:x
e
为多参数二次规划问题中t时刻的状态变量,包括pemfc系统中电堆反应消耗的氢气的摩尔质量的增量锂电池的核电状态soc、负载需求功率p
load
以及pemfc系统输出功率的增量δp
fc
;u
e
为多参数二次规划问题中的输入变量,包括pemfc系统的输出功率p
fc
;(t k|t)表示在t时刻对t k时刻的预测;j为未来t时刻至t k
‑
1时刻之间的预测时刻,j=0,1,
…
,k
‑
1;a
e
,b
e
均为对应变量的约束矩阵;
[0045]
将所述输入变量x
e
(t k)代入empc预测控制系统的目标函数中,得到所述多参数二次规划问题的表达式:
[0046][0047]
s.t.g
e
u
e
≤w
e
s
e
x
e
(t);
[0048]
其中:h
e
为hessian矩阵,h
e
>0;y
e
,g
e
,f
e
,w
e
,s
e
均为对应变量的约束矩阵;下标e表示约束。
[0049]
进一步的,所述步骤s302中对多参数二次规划问题进行简化的具体过程为:
[0050]
定义可将所述多参数二次规划问题的表达式简化为如下所示的
标准形式:
[0051][0052]
s.t.g
e z≤w
e
s
e
x
e
;
[0053]
其中:z为状态变量x
e
的一个仿射函数,其可利用一阶卡罗需
‑
库恩
‑
塔克条件进行求解,所述仿射函数z的显式表达式为:
[0054][0055]
其中:分别为等价于约束矩阵g
e
,w
e
,s
e
。
[0056]
进一步的,所述步骤s303求得所述empc预测控制系统的显式控制器的具体过程为:
[0057]
根据kkt条件,计算所述empc预测控制系统的初始状态变量对应的第一临界域,然后将步骤s302中的公式代入仿射函数z的显式表达式中,得到所述第一临界域内最优输入变量序列关于状态变量的显式表达式,并将所述最优输入变量序列的首项作用于所述燃料电池混合动力系统中,得到该第一临界域对应的状态分区及对应的控制律:
[0058]
u
e
=f
e
x
e
g
e
,x
e
∈cr0;
[0059]
其中:f
e
,g
e
分别为第一临界域对应的开环最优输入变量序列中局部仿射函数的参数,cr0为第一临界域;
[0060]
重复上述过程,得到其余的状态分区及对应的控制律:
[0061][0062]
其中:分别为第i临界域对应的开环最优输入变量序列中局部仿射函数的参数,cr
i
为第i临界域,i∈{1,2,
…
,n},n为状态分区的数量;
[0063]
整理各临界域的状态分区及对应的控制律,得到所述empc预测控制系统的显式控制模型:
[0064]
u
e
(k)=f
x
(x
e
);
[0065]
其中:f
x
()表示状态变量x
e
关于最优输入变量u
e
(k)的控制函数。
[0066]
本方案通过对燃料电池混合动力系统中的关键状态的动态变化过程进行描述,综合考虑到燃料电池疲软的输出特性,通过设置约束和权重,使锂电池能够起到“削峰填谷”的作用,实现了pemfc系统与锂电池间的功率分配,确保系统运行在安全工况范围下;并基于mpc控制理论和mpqp控制理论设计empc预测控制系统,将在线求解的二次规划问题转化为离线获得的多面体分段函数,在保证控制性能的同时,显著提高了控制策略的实时性,并且显著节约了整个控制过程的计算耗时。
[0067]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0068]
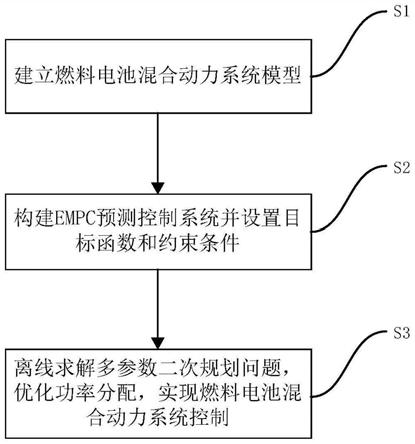
图1为本发明一种基于empc的燃料电池混合动力系统控制方法的流程图。
[0069]
图2为燃料电池混合动力系统的结构框图。
[0070]
图3为dc/dc转换器的电路原理图。
[0071]
图4为dc/dc转换器的输出效率曲线图。
[0072]
图5为pemfc系统中电堆的极化曲线图。
[0073]
图6为步骤s2的流程图。
[0074]
图7为步骤s3的流程图。
[0075]
图8为m
h2
‑
soc
‑
p
load
在子空间上的状态分区示意图。
[0076]
图9为epmc预测控制系统与传统的mpc控制系统的控制效果对比图。
[0077]
图10为empc预测控制系统与传统的mpc控制系统单步求解耗时的对比图。
具体实施方式
[0078]
下面通过具体实施方式进一步详细说明:
[0079]
实施例
[0080]
如图1所示,为本发明一种基于empc的燃料电池混合动力系统控制方法的流程图,具体包括以下步骤:
[0081]
s1:建立燃料电池混合动力系统模型。
[0082]
基于pemfc系统和锂电池建立燃料电池混合动力系统,并对所述燃料电池混合动力系统模型进行建模。
[0083]
在本实施例中,以摩托车作为研究对象,所述燃料电池混合动力摩托车的主要参数如下表1所示:
[0084]
参数名称数值整车质量175kg整车尺寸2190
×
770
×
1140mm电机额定功率3200w峰值功率8000w最高车速100km/h最大爬坡角度11
°
轮胎直径466mm
[0085]
表1
[0086]
燃料电池混合动力系统可分为四种结构,根据所述燃料电池混合动力摩托车的主要参数,其所需的功率较小,并且考虑该燃料电池混合动力系统中燃料电池系统(即pemfc系统)作为主要动力源,而锂电池作为辅助动力源,因此,本实施例中,建立如图2所示的燃料电池混合动力系统。
[0087]
如图2所示,所述燃料电池混合动力系统包括pemfc系统、dc/dc转换器、锂电池和负载,所述pemfc系统通过所述dc/dc转换器连接到功率总线后再与负载连接,所述pemfc系统用于将电化学反应产生的电能传输给dc/dc转换器,以驱动负载。所述dc/dc转换器用于调节pemfc系统的输出电流来实现pemfc系统与锂电池之间的功率分配,以保证燃料电池混
合动力系统运行在安全工况范围下。所述锂电池连接到功率总线后与负载连接,所述锂电池用于作为辅助动力源,为负载提供动力。
[0088]
然后,针对所述燃料电池混合动力系统中的pemfc系统、dc/dc转换器和锂电池分别进行建模。
[0089]
(1)对dc/dc转换器进行建模。
[0090]
如图3所示,所述dc/dc转换器采用双向、升降压型双象限转换器,包括一个电感l、两个滤波电容c1和c2、两个全控型igbt管或mosfet管q1和q2以及两个续流二极管d1和d2,该转换器结构简单,在相同的功率下主开关管电压电流应力小,电感易于设计。
[0091]
在本实施例中,所述dc/dc转换器的基础参数如下表2所示:
[0092]
工作模式电压、电流、升降压输入电压范围24~80v输出电压范围0~79v额定输出电流36a最大输出电流48a额定输出功率2160w
[0093]
表2
[0094]
根据表2所示的基础参数,对所述dc/dc转换器进行开环实验测试,调节pemfc系统的输出功率p
fc
,得到在不同的pemfc系统的输出功率p
fc
下dc/dc转换器的输出效率,并采用五次多项式对这些离散数据进行拟合,得到dc/dc转换器的输出效率曲线,所述dc/dc转换器的输出效率曲线如图4所示,进而得到所述dc/dc转换器的静态模型:
[0095]
η
dc
=a
dc
p
fc5
‑
b
dc
p
fc4
c
dc
p
fc3
‑
d
dc
p
fc2
e
dc
p
fc
f
dc
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0096]
其中:η
dc
为dc/dc转换器的输出效率;a
dc
,b
dc
,c
dc
,d
dc
,e
dc
,f
dc
分别为dc/dc转换器静态模型的模型系数;p
fc
为pemfc系统的点对的输出功率。
[0097]
(2)对pemfc系统进行建模。
[0098]
在本实施例中,所述pemfc系统的基础参数如下表3所示:
[0099]
参数名称数值尺寸249
×
213
×
210mm运行温度(根据电堆输出电流i
fc
计算)0.233
×
ifc 35.1℃额定功率2000w氢气压力0.5bar发电效率≥50%氢气纯度≥99.95%片数59质量6.5kg工作温度
‑
5~40℃工作湿度10~90%
[0100]
表3
[0101]
根据表3所示的基础参数,建立所述pemfc系统的模型,在本实施例中,由于所描述的是pemfc系统中电堆反应消耗氢气的变化情况,因此,所述pemfc系统的建模可表示为:
[0102][0103]
其中:为pemfc系统中电堆反应消耗的氢气的摩尔质量;p
fc
为pemfc系统的点对的输出功率;为pemfc系统中电堆的氢气低热值;为pemfc系统中的电堆效率。
[0104]
对所述pemfc系统模型模拟运行,可得到其极化曲线,所述pemfc系统的极化曲线如图5所示。
[0105]
(3)对锂电池进行建模。
[0106]
锂电池作为燃料电池混合动力系统中的辅助动力源,既需要满足电压等级,也需要容量事宜,由于在本实施例中,所述负载的额定电压为72v,因此所述锂电池也对应选择额定电压为72v的锂电池。所述锂电池的基础参数如下表4所示:
[0107]
参数名称数值标称电压72v截止电压48v标准容量48ah最大放电电流144a尺寸560
×
210
×
150mm
[0108]
表4
[0109]
根据表4所示的基础参数,建立锂电池的模型,由于锂电池模型描述的是锂电池的荷电状态的变化情况,因此,所述锂电池的充/放电模型可表示为:
[0110][0111]
其中:soc为锂电池的荷电状态;v0为锂电池的开路电压;r
bt
为锂电池的充/放电内阻;p
load
为负载需求功率;p
dc
为dc/dc转换器的输出功率,其可由p
fc
表示,即p
dc
=η
dc
p
fc
;q
bt
为锂电池的电池容量。
[0112]
由于锂电池模型可分为充电模型和放电模型,且充电模型和放电模型所对应的锂电池的内阻不同。因此,在对所述锂电池的充电和放电状态下分别进行建模时,需测出对应状态下的内阻。
[0113]
具体的,锂电池的充电内阻测量方法是在每一荷电状态的soc值下,先测出锂电池的开路电压v0,再接上电源,以恒定的电流i
b
为锂电池充电,并测量此时的电源电压v
p
,从而得到锂电池的充电内阻r
cha
:
[0114][0115]
经测量,锂电池在充电过程中,其内阻基本处于0.042ω,在本实施例中,对所述锂电池的充电内阻作简化处理,统一取r
cha
=0.042ω。
[0116]
同理,锂电池的放电内阻的测量方法是在每一荷电状态的soc值下,先测出锂电池的开路电压v0,再接上负载,以恒定的电流i
b
为放电,并测量此时的电源电压v
l
,从而得到锂电池的充电内阻r
dis
:
[0117][0118]
按照上述计算锂电池的放电内阻的方法进行实际测量并采集数据,然后计算得出锂电池的放电内阻与其荷电状态soc的函数关系,最终得到锂电池的线性控制模型,其中,所述锂电池的放电线性控制模型为:
[0119][0120]
其中:a
bt
,b
bt
,c
bt
分别为锂电池的放电线性控制模型的模型系数,在本实施例中,a
bt
=
‑
1.3446
×
10
‑
15
,b
bt
=2.7537
×
10
‑4,c
bt
=
‑
2.732
×
10
‑4。
[0121]
所述锂电池的充电线性控制模型为:
[0122][0123]
其中:d
bt
,e
bt
,f
bt
分别为锂电池的充电线性控制模型的模型系数,在本实施例中,d
bt
=3.5527
×
10
‑
15
,e
bt
=2.7537
×
10
‑4,f
bt
=
‑
2.732
×
10
‑4。
[0124]
s2:构建empc控制系统并设置目标函数和约束条件。
[0125]
为实现pemfc系统与锂电池之间的攻略分配,并且以最少的燃料消耗和最低的废气排放来完成整个驾驶过程,基于所述燃料电池混合动力系统模型,构建empc预测控制系统并设定所述empc预测控制系统目标函数和约束条件。
[0126]
如图6所示,所述步骤s2包括以下步骤:
[0127]
s201:构建empc预测控制模型并对所述empc预测控制模型进行增广。
[0128]
具体的,设置所述燃料电池混合动力系统的状态变量和输入变量,构建empc预测控制模型,并将负载需求功率设置为可测扰动项,然后将所述负载需求功率作为状态变量增广至所述empc预测控制模型中。
[0129]
所述增广后的empc预测控制模型可表示为:
[0130]
x
=ax bu
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0131]
其中:x为当前时刻增广后的状态变量,其中:x为当前时刻增广后的状态变量,为pemfc系统中电堆反应消耗的氢气的摩尔质量,soc为锂电池的核电状态,p
load
为负载需求功率,t表示矩阵的转置;x
为下一时刻增广后的状态变量;u为当前时刻的输入变量,p
fc
为pemfc系统的输出功率;a,b分别为状态变量和输入变量所对应的系数矩阵。
[0132]
s202:empc控制预测模型的离散化处理,得到empc预测控制系统。
[0133]
具体的,对步骤s201中得到的增广后的empc预测控制模型进行离散化处理,并设置采样时间,得到最终的empc预测控制系统,所述empc预测控制系统为线性时不变离散时间系统,其表达式为:
[0134]
x(t 1)=ax(t) bu(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0135]
其中:x(t)为empc预测控制系统当前时刻的状态变量,包括pemfc系统中电堆反应消耗的氢气的摩尔质量锂电池的核电状态soc以及负载需求功率p
load
;x(t 1)为empc预测控制系统下一时刻的状态变量;u(t)为empc预测控制系统当前时刻的输入变量,包括
pemfc系统的输出功率p
fc
;a,b分别为empc预测控制系统的状态变量和输入变量所对应的系数矩阵。
[0136]
在本实施例中,所述系数矩阵a,b分别为:
[0137][0138][0139]
其中:t
s
为采样时间,在本实施例中,t
s
=0.01s。
[0140]
s203:构建所述empc预测控制系统的目标函数和约束条件。
[0141]
为保证所述燃料电池混合动力系统的整体燃料消耗最小,通过建模综合考虑整个燃料电池混合动力系统的效率(pemfc系统、dc/dc转换器和锂电池),并通过设置权重,求解当前时间最优输入变量,所述最优输入变量即对应当前时刻最小的燃料消耗,因此,将所述empc预测控制系统的目标函数设计如下:
[0142][0143]
所述约束条件为:
[0144]
x
min
≤x
k
≤x
max
;k=0,1,
…
,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0145]
δu
min
≤δu
k
≤δu
max
;k=0,1,
…
,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0146]
u
min
≤u
k
≤u
max
;k=0,1,
…
,n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0147]
其中:u为预测输出的输入变量序列;k为采样时刻,k=0,1,
…
,n;δx
k
为k时刻的状态增量;δu
k
为k时刻输入增量;q,s分别为状态增量和输入增量的权重系数。
[0148]
在本实施例中,x
min
=[0
ꢀ‑
0.2
ꢀ‑
5]
t
,x
max
=[10 0.2 5]
t
,u
min
=200w,u
max
=1400w,δu
min
=
‑
150w,δu
max
=150w。
[0149]
为保证在负载需求功率p
load
发生剧烈变化时,所述pemfc系统的输出功率p
fc
仍然缓慢变化,在本实施例中,所述状态增量的权重系数q为:
[0150][0151]
为防止pemfc系统的输出功率增量较大,对其电堆造成损害,在本实施例中,所述输入增量的权重系数s为:
[0152]
s=1
×
10
‑4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0153]
s3:离线求解多参数二次规划问题,优化功率分配,实现燃料电池混合动力系统控制。
[0154]
具体的,根据所述empc预测控制系统及其目标函数和约束条件,构建多参数二次规划问题(mpqp问题),并求解多参数二次规划问题,得到empc预测控制系统的最优输入变
量,优化pemfc系统与锂电池的功率分配,实现燃料电池混合动力系统的控制。
[0155]
如图7所示,所述步骤s3包括以下步骤:
[0156]
s301:构建多参数二次规划问题。
[0157]
基于所述empc预测控制系统及其目标函数,构建多参数二次规划问题。所述多参数二次规划问题的求解过程可以将在线过程离线化,而在在线控制时,只需依据燃料电池混合动力系统的当前状态,选择实施相应的状态反馈控制律即可实现pemfc系统与锂电池之间的功率分配。
[0158]
具体的,由于所述empc预测控制系统为线性时不变离散时间系统,根据其线性时不变特性可知,t时刻empc预测控制系统基于多参数二次规划问题的状态变量x
e
(t)以及未来t时刻至t k
‑
1时刻empc预测控制系统假定的基于多参数二次规划问题的输入变量u
e
,根据假定的输入变量u
e
即可得到t时刻至t k时刻empc预测控制系统基于多参数二次规划问题的输入变量x
e
(t k):
[0159][0160]
其中:x
e
为多参数二次规划问题中t时刻的状态变量,包括pemfc系统中电堆反应消耗的氢气的摩尔质量的增量锂电池的核电状态soc、负载需求功率p
load
以及pemfc系统输出功率的增量δp
fc
,即u
e
为多参数二次规划问题中的输入变量,包括pemfc系统的输出功率p
fc
;(t k|t)表示在t时刻对t k时刻的预测;j为未来t时刻至t k
‑
1时刻之间的预测时刻,j=0,1,
…
,k
‑
1;a
e
,b
e
均为对应变量的约束矩阵。
[0161]
将上述式(18)的输入变量x
e
(t k)代入上述式(10)empc预测控制系统的目标函数中,即可得到所述多参数二次规划问题的表达式:
[0162][0163]
s.t.g
e
u
e
≤w
e
s
e
x
e
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0164]
其中:h
e
为hessian矩阵,h
e
>0;y
e
,g
e
,f
e
,w
e
,s
e
均为对应变量的约束矩阵;下标e表示约束。
[0165]
s302:对所述多参数二次规划问题进行简化,得到所述多参数二次规划问题的标准形式。
[0166]
定义可将所述多参数二次规划问题的表达式简化为如下所示的标准形式:
[0167][0168]
s.t.g
e
z≤w
e
s
e
x
e
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0169]
其中:z为状态变量x
e
的一个仿射函数,其可利用一阶卡罗需
‑
库恩
‑
塔克条件(kkt)进行求解,所述仿射函数z的显式表达式为:
[0170][0171]
其中:分别为等价于约束矩阵g
e
,w
e
,s
e
。
[0172]
s303:离线求解mpqp问题,得到状态分区和对应的控制律以及显式控制模型。
[0173]
利用一阶卡罗需
‑
库恩
‑
塔克条件(kkt条件)对所述多参数二次规划问题的标准形式进行离线求解,由于h
e
>0,则该解唯一,然后求得所述empc预测控制系统的状态分区及对应的控制律,进而得到所述empc预测控制系统的显式控制模型。
[0174]
具体的,根据一阶卡罗需
‑
库恩
‑
塔克条件(kkt条件),计算所述empc预测控制系统的初始状态变量x
e
对应的第一临界域cr0,然后将步骤s302中定义的公式代入式(23)的仿射函数z的显式表达式中,得到所述第一临界域cr0内最优输入变量序列u
e
关于状态变量x
e
的显式表达式,并将所述最优输入变量序列u
e
的首项作用于所述燃料电池混合动力系统中,得到该第一临界域cr0对应的状态分区及对应的控制律:
[0175]
u
e
=f
e
x
e
g
e
,x
e
∈cr0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(24)
[0176]
其中:f
e
,g
e
分别为第一临界域对应的开环最优输入变量序列中局部仿射函数的参数,cr0为第一临界域。
[0177]
重复上述过程,得到其余的状态分区及对应的控制律:
[0178][0179]
其中:分别为第i临界域对应的开环最优输入变量序列中局部仿射函数的参数,cr
i
为第i临界域,i∈{1,2,
…
,n},n为状态分区的数量。
[0180]
经计算,本实施例最终得到37个分区,由于显式控制模型包括了四个相关参数,即因此,整理上述各临界域的状态分区及对应的控制律,可以将所述empc预测控制系统的显式控制模型表示为:
[0181]
u
e
(k)=f
x
(x
e
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0182]
其中:f
x
()表示状态变量x
e
关于最优输入变量u
e
(k)的控制函数。
[0183]
当δp
fc
=300w时,可绘制出在子空间上的状态分区,其示意图如图8所示。
[0184]
s304:在线求解最有输入变量,实现燃料电池混合动力系统的控制。
[0185]
在对所述燃料电池混合动力系统进行在线控制时,只需在线查找当前时刻燃料电池混合动力系统的状态所对应的状态分区,利用所述显式控制模型计算得到最优输入变量序列,并将该最优输入变量序列作用于所述燃料电池混合动力系统中,调节pemfc系统与锂电池之间的功率分配,即可实现燃料电池混合动力系统的控制。
[0186]
最后,为验证本方案的控制效果,基于负载需求功率p
load
变化,将本方案的epmc预测控制系统与传统的mpc控制系统对比。
[0187]
如图9所示,为epmc预测控制系统与传统的mpc控制系统的控制效果对比图,可以看出,在负载需求功率p
load
发生剧烈变化时,考虑到饶辽电池疲软的特性,empc预测控制系统与传统的mpc控制系统都能够控制燃料电池的输出功率缓慢变化,同时锂电池能够及时发挥“削峰填谷”的作用。但由于empc预测控制系统的在线求解能力远高于mpc控制系统,所以empc预测控制系统能够使系统更快地趋于稳定,明显提高了控制策略的实时性。
[0188]
上述控制效果的不同,很大原因是因为两种算法的耗时存在很大差异。为了定量分析该差异,使用上述仿真环境对两种控制系统的仿真耗时进行了对比分析。
[0189]
如图10所示,为本方案的empc预测控制系统与传统的mpc控制系统单步求解耗时的对比图。可以明显看出,empc预测控制系统单步求解耗时大多数情况都要小于mpc控制系统,只有极少数情况会大于mpc控制系统,为了定量分析二者的区别,二者的控制耗时对比数据如表5所示:
[0190]
控制系统单步最大耗时单步最小耗时总耗时平均单步耗时mpc控制系统108.5ms7.4ms27165.5ms10msempc预测控制系统9.6ms1.1ms4599.2ms1.7ms
[0191]
表5
[0192]
由表5可以看出,mpc控制系统的单步最大耗时为108.5ms,而empc预测控制系统的单步最大耗时仅为9.6ms,empc预测控制系统比mpc控制系统减少了98.9ms;mpc控制系统单步最小耗时为7.4ms,empc预测控制系统单步最小耗时为1.1ms,empc预测控制系统比mpc控制系统减少了6.3ms,empc预测控制系统相比于mpc控制系统节省了在线控制时间,平均单步运行速度提升了8.3ms。
[0193]
本发明基于empc控制理论,考虑到燃料电池混合动力系统结构的多样性和复杂性,对系统中的关键状态的动态变化过程进行描述;同时还考虑到燃料电池疲软的输出特性,通过设置约束和权重,让锂电池起到“削峰填谷”的作用,保证系统高效稳定运行;使用mpqp理论设计empc,能够解决现有mpc预测控制系统在线计算周期长的问题,将传统mpc预测控制系统最优问题的求解过程从在线转为离线,在线控制时,只需依据系统的当前状态,实现了pemfc系统与锂电池之间的功率分配,且显著提高了控制策略的计算耗时,并且本发明提供燃料电池混合动力系统控制方法的控制策略准确,能够很好的满足实验室模拟现实场景中燃料电池工作及控制的要求。
[0194]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和本发明的实用性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
