1.本发明涉及一种对能够收容移动体的收容区域进行管理的收容区域管理装置。
背景技术:
2.以往,正在研究用于实现自动代客驻车的技术,所述自动代客驻车包括车辆自动地从下车区域行驶到空闲的驻车区域而驻车的自动驻车、以及车辆根据规定的呼叫从驻车区域出库并自动地向规定的乘车区域行驶并停车的自动出库。专利文献1中公开了一种车辆控制装置,其以混入有普通驻车的状况为前提,对于普通驻车及自动代客驻车均容易适用,当执行自动代客驻车时,能够实现更准确的自动行驶。
3.在先技术文献
4.专利文献1:日本特开2019
‑
139322号公报
5.然而,关于能够实现如车辆等移动体的自动驻车、自动出库的自主移动等级,每个移动体存在各种等级的差异,由于这种差异,收容区域内的移动体的顺利的移动可能会受到阻碍。
技术实现要素:
6.本发明提供一种收容区域管理装置,其通过考虑到每个移动体的自主移动等级的差异,能够有效地活用收容区域。
7.本发明是一种收容区域管理装置,其对收容移动体的收容区域进行管理,用于使所述移动体移动到所述收容区域内的规定的收容位置,
8.所述收容区域管理装置具备:
9.获取部,其获取与所述移动体能够进行的自主移动有关的自主移动等级信息;以及
10.处理部,在所述移动体进入所述收容区域后,需要在所述移动体在所述收容区域内移动时,该处理部指示所述移动体进行自主移动等级的变更。
11.发明效果
12.根据本发明,通过考虑到每个移动体的自主移动等级的差异,能够有效地活用收容区域。
附图说明
13.图1是表示本实施方式的车辆系统的结构的一例的图。
14.图2是表示由本实施方式的停车场管理装置管理的停车场的一例的图。
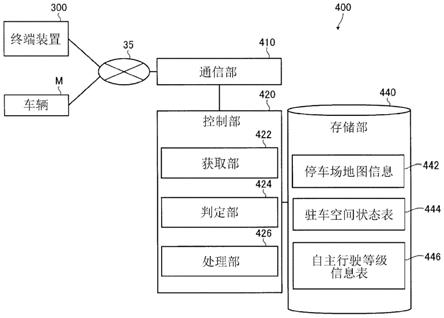
15.图3是表示本实施方式的停车场管理装置的结构的一例的图。
16.图4是表示驻车空间状态表的一例的图。
17.图5是表示自主行驶等级信息表的一例的图。
18.图6是表示基于第一控制例的、停车场管理装置的一系列的处理流程的流程图。
19.图7是表示基于第二控制例的、停车场管理装置的一系列的处理流程的流程图。
20.附图标记说明:
21.400
ꢀꢀ
停车场管理装置(收纳区域管理装置);
22.422
ꢀꢀ
获取部;
23.426
ꢀꢀ
处理部;
24.m
ꢀꢀꢀꢀ
车辆(移动体);
25.pa
ꢀꢀꢀ
停车场(收容区域);
26.ps
ꢀꢀꢀ
驻车空间。
具体实施方式
27.以下,根据附图,对本发明的收容区域管理装置的一实施方式进行说明。需要说明的是,在以下实施方式中,对将本发明中的移动体设为机动车等车辆,且将本发明中的收容区域设为停车场的例子进行了说明。另外,在以下实施方式中,对将本发明的收容区域管理装置设为对停车场进行管理的停车场管理装置的例子进行说明。
28.首先,对本实施方式的车辆进行说明。本实施方式的车辆(以下,也称为车辆m)是如下机动车,其具备:驱动源(例如,在后面叙述的行驶驱动力输出装置200);以及包括通过驱动源的动力驱动的驱动轮在内的车轮(例如,二轮、三轮或四轮)。作为车辆m的驱动源,例如使用电动机、内燃机(例如,汽油发动机)、或电动机与内燃机的组合。
29.另外,车辆m具备如图1所示的车辆系统1。车辆系统1至少具有在所限定的特定的区域内(例如,在后面叙述的停车场pa内)能够实施与车辆m有关的所有驾驶任务的功能。在此,驾驶任务例如是车辆m的左右方向上的动作(转向)控制、前后方向上的动作(加速、减速)的控制、以及驾驶环境的监视等车辆m的操纵所需的实时驾驶功能、行驶轨道的规划(planning)等战术性功能。
30.如图1所示,车辆系统1具备相机11、雷达装置12、探测器13、车辆传感器14、输入输出器件20、通信装置30、导航装置40、驾驶操作件50、自动驾驶控制装置100、行驶驱动力输出装置200、制动装置210、以及转向装置220。这些各装置通过有线或无线通信网络而以能够互相通信的方式连接。连接这些各装置的通信网络例如是can(controller area network)。
31.相机11是拍摄车辆m的周边(例如,车辆m的前方)的数码相机,并将通过拍摄而得到的图像数据输出到自动驾驶控制装置100。雷达装置12例如是使用了毫米波段的电波的雷达装置,并检测处于车辆m的周边(例如,车辆m的前方、后方及侧方)的物体的位置,且向自动驾驶控制装置100输出其检测结果。
32.探测器13例如是lidar(laser imaging detectionand ranging),并使用规定的激光来测量直到位于车辆m的周边(例如,车辆m的前方、后方及侧方)的物体(对象物)为止的距离,并将其测量结果输出到自动驾驶控制装置100。
33.车辆传感器14例如包括对车辆m的速度进行检测的车速传感器、对车辆m的加速度进行检测的加速度传感器、对绕车辆m的铅垂轴的角速度进行检测的角速度传感器、以及对车辆m的朝向进行检测的方位传感器等。另外,车辆传感器14包括对通信装置30用于通信的电波的电波强度(即,通信强度)进行检测的电波强度传感器。车辆传感器14将由各传感器
进行的检测结果输出到自动驾驶控制装置100。
34.输入输出器件20包括将各种信息输出到车辆m的用户(以下,也简称为用户)的输出器件、以及从用户接受各种输入操作的输入器件。需要说明的是,在本实施方式中,用户并不限于管理或拥有车辆m而使用车辆m的人。例如,用户可以接收来自管理或拥有车辆m者的委托,作为其代理而使用车辆m。
35.输入输出器件20的输出器件例如是进行基于自动驾驶控制装置100的处理结果的显示的显示器。该输出器件可以是扬声器、蜂鸣器及显示灯等。另外,输入输出器件20的输入器件例如是将与从用户接受到的输入操作相应的操作信号向自动驾驶控制装置100输出的触摸面板、操作按钮(按键、开关等)。
36.通信装置30通过无线连接到网络35,并借助网络35而与在车辆系统1的外部设置的其他装置进行通信。网络35例如是移动体通信网络、wi
‑
fi网络、bluetooth(注册商标)、dsrc(dedicated short range communication)等。
37.通信装置30例如与由用户携带的终端装置300、及对能够使车辆m驻车的停车场pa进行管理的停车场管理装置400进行通信。终端装置300例如是智能手机、平板终端等,是连接到网络35并具备输入输出器件310的电子设备。输入输出器件310例如是对用户显示各种信息的显示器、接受用户的输入操作的触摸面板等。在后面叙述停车场pa及停车场管理装置400。
38.导航装置40具备gnss(global navigation satellite system)接收器41、及输入输出器件42。另外,导航装置40具备硬盘驱动器(以下,也称为hdd)、闪存器等存储装置(未图示),且在该存储装置中存储有第一地图信息43。第一地图信息43例如是通过表示道路的路段和由路段连接的节点来表示道路形状的信息。另外,第一地图信息43也可以包括表示道路的曲率、poi(point ofinterest)的信息。
39.gnss接收器41基于从gnss卫星接收的信号,将车辆m所位于的地点的纬度及经度确定为车辆m的位置。另外,导航装置40可以通过利用了车辆传感器14的输出的ins(inertial navigation system)来确定或修正车辆m的位置。
40.输入输出器件42包括对用户输出各种信息的输出器件、以及从用户接受各种输入操作的输入器件。输入输出器件42的输出器件例如是进行基于导航装置40的处理结果的显示的(例如,显示在后面叙述的地图上路径的)显示器。另外,输入输出器件42的输入器件例如是将与从用户接受到的输入操作相应的操作信号向导航装置40输出的触摸面板、操作按钮(按键、开关等)。输入输出器件42可以与输入输出器件20共用化。
41.虽将省略详细说明,但导航装置40例如参照第一地图信息43来决定从通过gnss接收器41确定的车辆m的位置到通过用户输入的目的地的路径(以下,也称为地图上路径)。然后,导航装置40通过输入输出器件42将所决定的地图上路径介绍给用户。另外,导航装置40构成为能够将表示所确定的车辆m的位置的信息、表示所决定的地图上路径的信息输出到自动驾驶控制装置100。
42.导航装置40的一部分或全部功能也可以通过终端装置300来实现。另外,导航装置40的一部分或全部功能也可以由能够通过通信装置30等与车辆系统1进行通信的外部的服务器装置(导航服务器)来实现。
43.驾驶操作件50是加速踏板、制动踏板、变速杆、转向盘、异形转向器、操纵杆等各种
操作件。在驾驶操作件50上设置有传感器,该传感器检测对驾驶操作件50的操作量或操作的有无。由驾驶操作件50的传感器进行的检测结果输出到自动驾驶控制装置100、行驶驱动力输出装置200、制动装置210及转向装置220中的一部分或全部。
44.行驶驱动力输出装置200将用于使车辆m行驶的行驶驱动力(转矩)输出到驱动轮。行驶驱动力输出装置200例如具备电动机、以及对电动机进行控制的电动机ecu(electronic control unit)。电动机ecu基于由驾驶操作件50(例如,加速踏板)的传感器进行的检测结果、来自自动驾驶控制装置100的控制信息来控制电动机。另外,在车辆m具备作为驱动源的内燃机、变速器的情况下,行驶驱动力输出装置200也可以包括内燃机、变速器、及控制它们的ecu。
45.制动装置210例如具备制动钳、向制动钳传递液压的液压缸、使液压缸产生液压的电动马达、以及制动ecu。制动ecu基于由驾驶操作件50(例如制动踏板)的传感器进行的检测结果、来自自动驾驶控制装置100的控制信息,控制制动装置210的电动马达,使得与制动操作相应的制动转矩输出到各车轮。
46.转向装置220例如具备转向ecu、以及电动马达。转向装置220的电动马达例如使力作用于齿轮齿条机构来变更转向轮的朝向。转向ecu基于由驾驶操作件50(例如,转向盘)的传感器进行的检测结果、来自自动驾驶控制装置100的控制信息,驱动转向装置220的电动马达,并使转向轮的朝向(即,转向角)变更。
47.自动驾驶控制装置100具备环境辨识部110、高精度位置辨识部120、行动计划生成部130及行动控制部140。另外,自动驾驶控制装置100具备通过由自动驾驶控制装置100的各功能部(例如,高精度位置辨识部120)能够访问的闪存器等来实现的存储装置(未图示),且在该存储装置中存储有第二地图信息150。
48.第二地图信息150是比第一地图信息43高精度的地图信息。第二地图信息150例如包括表示车道的中央的信息、表示车道的分界线(例如,道路划分线)的信息等。另外,在第二地图信息150中可以包括道路信息、交通限制信息、地址信息、设施信息、以及电话号码信息等。
49.另外,第二地图信息150可以通过通信装置30与其他装置进行通信而随时被升级。例如,当车辆m向停车场pa入场时,通信装置30从停车场管理装置400接收表示停车场pa内的车道、各驻车空间的位置等的信息(以下,也称为停车场内地图信息)。然后,自动驾驶控制装置100以将接收到的停车场内地图信息纳入到第二地图信息150的方式升级第二地图信息150。由此,自动驾驶控制装置100能够参照第二地图信息150来确定停车场pa内的各驻车空间的位置等。
50.环境辨识部110对通过相机11、雷达装置12及探测器13中的一部分或全部而获取的信息进行传感器融合处理,辨识处于车辆m的周边的物体,并且辨识其位置。环境辨识部110例如辨识障碍物、道路形状、信号机、护栏、电线杆、周边车辆(包括速度和加速度等行驶状态、驻车状态)、行车道标志、行人等,并且辨识它们的位置。
51.高精度位置辨识部120参照通过导航装置40确定的车辆m的位置、由车辆传感器14进行的检测结果、通过相机11拍摄到的图像、第二地图信息等来辨识车辆m的详细位置、姿态。高精度位置辨识部120例如辨识由车辆m正在行驶的行驶车道,或者辨识本车辆相对于该行驶车道的相对位置及姿态。另外,高精度位置辨识部120例如还辨识停车场pa内的车辆
m的位置等。
52.行动计划生成部130生成车辆m的行动计划。若具体地进行说明,行动计划生成部130生成由车辆m将来行驶的目标轨道来作为车辆m的行动计划。目标轨道例如是将车辆m应该到达的地点(轨道点)每隔规定的行驶距离(例如,几[m]程度)排列表现的信息。另外,目标轨道可以包括每一规定的时刻或每一轨道点的车辆m的目标速度、目标加速度等速度要素的信息。行动计划生成部130例如按照通过通信装置30接收的停车场管理装置400的指示,生成行动计划。
[0053]
行动控制部140控制车辆m以使其按照由行动计划生成部130生成的行动计划来行动。若具体地进行说明,行动控制部140控制行驶驱动力输出装置200、制动装置210、转向装置220,以使车辆m按照预定的时刻通过由行动计划生成部130生成的目标轨道。行动控制部140例如基于附随于目标轨道的速度要素来控制行驶驱动力输出装置200、制动装置210、根据目标轨道的弯曲状况来控制转向装置220。
[0054]
需要说明的是,自动驾驶控制装置100所具备的各功能部例如通过由cpu(central processing unit)执行规定的程序(软件)来实现。另外,自动驾驶控制装置100的功能部的一部分或全部可以通过lsi(large scale integration)、asic(application specific integrated circuit)、fpga(field
‑
programmable gate array)、gpu(graphics processing unit)等硬件来实现,例如,存储第二地图信息150的存储装置及高精度位置辨识部120可以通过mpu(map positioning unit)来实现。而且,自动驾驶控制装置100的功能部的一部分或全部可以通过软件与硬件的协作来实现。
[0055]
接着,参照图2对能够使车辆m驻车的停车场pa的一例进行说明。如图2所示,停车场pa是在成为用户的访问目的地的访问处设施中一并设置的自动代客驻车方式的停车场,且是通过停车场管理装置400管理的停车场。停车场pa具备能够收容车辆(例如车辆m)的多个驻车空间ps、以及设置在这些多个驻车空间ps的跟前的上下车区域pl。以下,对用户利用停车场pa的情况、即使车辆m向停车场pa入场的情况的例子进行说明。
[0056]
用户在利用停车场pa之前,用导航装置40、终端装置300等来进行停车场pa的利用预约(以下,电称为驻车预约)。该“用户”并不限于车辆m的所有者和管理者,例如包括作为车辆m的所有者等的代理来进行驻车预约等手续者(例如,接待员)。在该驻车预约中,用户输入作为车辆m的标识符(识别信息)的车辆id、将车辆m在停车场pa驻车的驻车预定时间等。作为驻车预定时间,例如输入有车辆m预定向停车场pa入场的入场预定日期时刻、以及车辆m预定从停车场pa退场的退场预定日期时刻。由用户输入的这些信息被发送到停车场管理装置400。停车场管理装置400参照所接收到的这些信息、表示停车场pa的驻车预约状况的管理表(未图示),判定驻车预定时间(从入场预定日期时刻到退场预定日期时刻的期间)内是否存在能够使车辆m驻车的驻车空间ps。然后,若存在能够使车辆m驻车的驻车空间ps,则停车场管理装置400接受驻车预约而向用户通知该意旨。
[0057]
此后,当驻车预定时间到来时,用户乘坐车辆m到达上下车区域pl,并在上下车区域pl上从车辆m下车。用户下车后,车辆m进行自动驾驶而执行移动到停车场pa内的规定的驻车空间ps的自行行走入库事件。例如,当用户在上下车区域pl上从车辆m下车时,通过终端装置300等,将自行行走入库事件的开始要求发送到停车场管理装置400。停车场管理装置400接收到自行行走入库事件的开始要求时,参照在后面叙述的驻车空间信息表442等来
决定车辆m应该入库的驻车空间ps,并指示车辆m向该驻车空间ps移动。另外,停车场管理装置400也可以还决定车辆m应该行驶至车辆m应该入库的驻车空间ps为止的路径,并指示车辆m沿着该路径移动。然后,车辆m按照从停车场管理装置400接受到的指示,执行由相机11、雷达装置12或探测器13等进行的感测,同时移动至通过停车场管理装置400指示的驻车空间ps。
[0058]
另外,当从停车场pa退场时,用户使车辆m执行自行行走出库事件。当车辆m执行自行行走出库事件时,从所驻车的驻车空间ps进行自动驾驶,并移动至上下车区域pl。例如,当使车辆m执行自行行走出库事件时,用户通过自身的终端装置300等,将自行行走出库事件的开始要求发送到停车场管理装置400。当接收到该自行行走出库事件的开始要求时,停车场管理装置400指示车辆m向上下车区域pl移动。另外,此时,停车场管理装置400还可以决定车辆m应该行驶至上下车区域pl为止的路径,并指示车辆m沿着该路径移动。接受来自停车场管理装置400的指示的车辆m执行由相机11、雷达装置12或探测器13等进行的感测,同时移动至上下车区域pl。然后,用户在上下车区域pl上搭乘车辆m,并从停车场pa退场。
[0059]
接着,参照图3对本停车场管理装置400的结构的一例进行说明。如图3所示,停车场管理装置400例如具备通信部410、控制部420及存储部440。控制部420例如具备获取部422、判定部424、处理部426。控制部420的各构成要素例如通过cpu等硬件处理器执行程序(软件)来实现。这些构成要素中的一部分或全部可以通过lsi、asic、fpga、gpu等硬件(包括电路部:circuitry)来实现,也可以通过软件与硬件的协作来实现。程序可以预先保存到hdd、闪存器等存储装置(具备非暂时性的存储介质的存储装置)中,也可以保存到dvd、cd
‑
rom等能够装卸的存储介质(非暂时性的存储介质)中,并通过将存储介质装配到驱动装置来进行安装。
[0060]
在存储部440中保存有停车场地图信息442、驻车空间状态表444、自主行驶等级信息表446等信息。停车场地图信息442是几何性地表示停车场pa的结构的信息。另外,停车场地图信息442包括每个驻车空间ps的坐标。在后面叙述驻车空间状态表444及自主行驶等级信息表446。存储部440通过hdd和闪存器等来实现。
[0061]
通信部410通过无线(例如,网络35)与车辆m、用户的终端装置300进行通信。控制部420基于通过通信部410来获取的信息、保存到存储部440中的信息,决定使车辆m驻车的驻车空间ps。
[0062]
控制部420例如具备获取部422和判定部424。获取部422例如借助通信部410来获取在停车场pa驻车的车辆m的位置信息。该位置信息例如以图4所示的驻车空间状态表444的形式保存。
[0063]
如图4所示,驻车空间状态表444中例如相对于作为驻车空间ps的识别信息的驻车空间id,对应有表示是空闲状态还是满状态(驻车中)的信息、当处于满状态时作为驻车中的车辆m的识别信息的车辆id、当处于满状态时的车辆m的入库时刻。在车辆m向停车场入库的时间点,与该车辆m的车辆id建立对应关系地记录入库时刻。需要说明的是,车辆id例如可以是在车辆号标记(所谓的车牌)中记载的车辆号、车辆数编号。
[0064]
另外,获取部422例如借助通信部410来获取与向停车场pa入库的车辆m、正在停车场pa驻车的车辆m的自主行驶等级(自主移动等级)有关的自主行驶等级信息。自主行驶等级表示车辆m能够自主性地移动(行驶)的等级,例如,车辆m能够自主性地进行的项目(动
作)越多,则赋予越高等级。
[0065]
更具体来讲,例如,实施直到由停车场管理装置400指示的驻车位置为止的路径计划、且在没有接收到来自其他装置(例如,停车场管理装置400)的引导、支援的情况下沿着所计划的路径辨识本车辆的位置的同时移动而能够在由停车场管理装置400指示的驻车位置驻车的车辆m被视为自主行驶等级为高。另外,沿着停车场管理装置400所实施的路径计划辨识本车辆的位置的同时移动而能够在由停车场管理装置400指示的驻车位置驻车的车辆m被视为自主行驶等级为中。并且,沿着停车场管理装置400所实施的路径计划、且参照由停车场管理装置400通知的本车辆的位置的同时移动而能够在由停车场管理装置400指示的驻车位置驻车的车辆m被视为自主行驶等级为低。
[0066]
需要说明的是,以下,将实施到由停车场管理装置400指示的驻车位置为止的路径计划的功能、即对到由停车场管理装置400指示的驻车位置为止的路径进行搜索及决定的功能也称为路径计划实施功能。另外,以下,将对停车场pa内的本车辆的位置进行辨识的功能也称为自身位置辨识功能。
[0067]
例如,向停车场pa入库的车辆m、正在停车场pa驻车的车辆m与本车辆的车辆id建立对应关系地,将表示本车辆的自主行驶等级的自主行驶等级信息发送到停车场管理装置400。例如,具备路径计划实施功能及自身位置辨识功能的车辆m发送表示“高”的信息来作为表示本车辆的自主行驶等级的自主行驶等级信息。另外,不具备路径计划实施功能但具备自身位置辨识功能的车辆m发送表示“中”的信息来作为表示本车辆的自主行驶等级的自主行驶等级信息。并且,不具备路径计划实施功能及自身位置辨识功能的车辆m发送表示“低”的信息来作为表示本车辆的自主行驶等级的自主行驶等级信息。
[0068]
另外,车辆m可以发送表示与自主行驶有关的功能中本车辆所具备的功能的信息,来作为自主行驶等级信息。例如,具备路径计划实施功能及自身位置辨识功能的车辆m也可以发送表示路径计划实施功能为“有”且自身位置辨识功能为“有”的信息,来作为表示本车辆的自主行驶等级的自主行驶等级信息。另外,不具备路径计划实施功能但具备自身位置辨识功能的车辆m也可以发送表示路径计划实施功能为“无”且自身位置辨识功能为“有”的信息,来作为表示本车辆的自主行驶等级的自主行驶等级信息。并且,不具备路径计划实施功能及自身位置辨识功能的车辆m也可以发送表示路径计划实施功能为“无”且自身位置辨识功能为“无”的信息,来作为表示本车辆的自主行驶等级的自主行驶等级信息。
[0069]
获取部422获取从向停车场pa入库的车辆m、正在停车场pa驻车的车辆m发送的自主行驶等级信息,并将所获取的自主行驶等级信息与该车辆m的车辆id建立对应关系地,存储到图5所示的自主行驶等级信息表446中。
[0070]
判定部424基于各车辆的自主行驶等级信息,对向停车场pa入库的车辆m、正在停车场pa驻车的车辆m进行分类,例如,将表示该分类的信息与各车辆的车辆id建立对应关系地,存储到自主行驶等级信息表446中。在此,分类至少存在两个分类以上,在本实施方式中设置分类a、分类b及分类c这三个分类。判定部424例如将自主行驶等级信息为“高”的车辆m分类为分类a,将自主行驶等级信息为“中”的车辆m分类为分类b,将自主行驶等级信息为“低”的车辆m分类为分类c。即,按照自主行驶等级由高到低的顺序,成为分类a、分类b、分类c。
[0071]
另外,判定部424也可以基于与各车辆所具备的自主行驶有关的功能,对向停车场
pa入库的车辆m、正在停车场pa驻车的车辆m进行分类。例如,在该情况下,判定部424将具备路径计划实施功能及自身位置辨识功能的车辆m分类为分类a,将不具备路径计划实施功能但具备自身位置辨识功能的车辆m分类为分类b,将不具备路径计划实施功能及自身位置辨识功能的车辆m分类为分类c即可。需要说明的是,分类的数量、分类的方法等并不限定于在此所列举出的例子。
[0072]
[第一控制例]
[0073]
接着,对停车场管理装置400的第一控制例进行说明。如上所述,停车场pa内的各车辆的自主行驶等级各种各样,根据该差异,可能会阻碍停车场pa内的车辆m的顺利的移动、驻车。例如,预想到分类a的车辆m(即,自主行驶等级高的车辆m)能够比分类c的车辆m(即,自主行驶等级低的车辆m)更迅速地在停车场pa内移动。因此,可预想到通过将分类相同的车辆m彼此、即自主行驶等级相近的车辆m彼此汇总到一起地在停车场pa内的特定的区域驻车,能够更顺利地进行这些车辆m的移动(例如,到驻车为止的移动)。
[0074]
于是,车辆m向停车场pa入库时,停车场管理装置400基于从该车辆m获取的自主行驶等级信息,决定使该车辆m驻车的驻车位置。具体来讲,停车场管理装置400基于在车辆m在停车场pa驻车时由获取部422获得的自主行驶等级信息,通过处理部426决定使车辆m驻车的驻车位置。由此,停车场管理装置400能够使各车辆在考虑到其自主行驶等级的适当的驻车位置驻车,在与丝毫不考虑各车辆的自主行驶等级的情况相比,能够提高整个停车场pa的利用效率,能够有效地活用停车场pa。
[0075]
例如,在如上述的分类a、b、c那样基于自主行驶等级信息得到的分类至少存在两个分类的条件下,处理部426优选以使分类相同的车辆m彼此汇总到一起地在停车场pa内的特定的局部驻车区域驻车的方式,决定车辆m的驻车位置。局部驻车区域是指占据停车场pa内的特定的部分的区域,是包括至少一个驻车空间ps(驻车位置)的区域。由此,将能够分类为与自主行驶有关的性能相近(例如,相同)的车辆m彼此汇总到一起的同时决定驻车位置,因此抑制与自主行驶有关的性能差异大的车辆m彼此相邻地驻车的可能性,能够进一步提高整个停车场pa的利用效率。
[0076]
另外,处理部426优选基于停车场pa的利用状况而使局部驻车区域的分布变动。由此,使分类相同的车辆m汇总到一起地驻车的位置能够基于停车场pa的利用状况而改变,能够决定与利用状况相应的驻车位置。需要说明的是,在此,关于停车场pa的利用状况,除当前的停车场pa的状况(例如,在停车场pa驻车中的车辆的数量、由这些车辆专有的驻车面积等)、将来预定的停车场pa的状况(驻车预约的信息)等之外,也可以考虑基于过去累积的与停车场pa的状况有关的信息预测的预测结果。这样,也能够应对在即将入库时进行驻车预约这样的突然来到停车场pa的车辆。
[0077]
例如,平日自主行驶等级高的车辆m的驻车台数多,休息日自主行驶等级低的车辆m的驻车台数多。在该情况下,可以以平日使自主行驶等级低的车辆m在停车场pa的入口侧驻车,且休息日使自主行驶等级高的车辆m在停车场pa的入口侧驻车的方式,使局部驻车区域的分布变动。这样,能够提高整个停车场pa的利用效率,能够有效地活用停车场pa。需要说明的是,能够在任意时机使局部驻车区域的分布变动。
[0078]
另外,车辆m的自主行驶等级有时向停车场pa入库之后,在停车场pa驻车着时发生变化。例如,有时通过来自停车场管理装置400的指示等,借助无线(例如,网络35)而自动更
新与车辆m的自动驾驶控制装置100有关的软件。在这种情况下,有时车辆m的自主行驶等级发生变化,而使该车辆m的分类发生变化。
[0079]
这样,车辆m的自主行驶等级、分类发生变化时,处理部426优选将如下驻车位置决定为使自主行驶等级、分类发生了变化的车辆m驻车的驻车位置,该驻车位置是指与变化前的自主行驶等级、分类对应的局部驻车区域、及与变化后的自主行驶等级、分类对应的局部驻车区域中的、驻车的车辆m的台数少的一方的局部驻车区域所包括的驻车位置。这样,通过使自主行驶等级、分类变化了的车辆m在所驻车的车辆m的台数少的一方的局部驻车区域驻车,能够使各局部驻车区域的驻车台数平均化而提高停车场pa内的便利性。
[0080]
另外,通过变更车辆m的自主行驶等级、分类,能够有时增加停车场pa能够接受的车辆m的台数。例如,设想如下场景:在与低的自主行驶等级的分类(例如,分类c)对应的局部驻车区域为占满车,但在与更高的自主行驶等级的分类(例如,分类b)对应的局部驻车区域存在空位的状况下,低的自主行驶等级的车辆m(例如,分类c)试图驻车。在该状态下,与低的自主行驶等级的分类对应的局部驻车区域为占满车,该车辆m无法驻车。然而,如果通过更新(所谓的升级)与自动驾驶控制装置100有关的软件,能够提升该车辆m的自主行驶等级的分类(例如,从分类c升到分类b),则能够使该车辆m驻车,能够有效地活用停车场pa。
[0081]
于是,在这种场景下,处理部426优选借助通信部410,向车辆m的用户的终端装置300询问可否变更车辆m的自主行驶等级,若获得用户的允许,则变更自主行驶等级。由此,能够尊重用户的意图的同时提高整个停车场pa的利用效率,能够有效地活用停车场pa。在此,尊重用户的意图是指,例如,关于伴随提升自主行驶等级的变更而无法使用车辆m的车辆不可使用时间的发生、伴随该变更产生的能源的减少等,听凭用户的意图来判断是否允许。
[0082]
另外,还可以考虑到车辆m为原样的自主行驶等级时,无法向停车场pa入库。于是,处理部426优选在向停车场pa入库之前需要变更车辆m的自主行驶等级时,通知该车辆m的用户在向停车场pa入库之前需要变更自主行驶等级。由此,例如,能够在向停车场pa入库之前升级与自动驾驶控制装置100有关的软件时,能够通知用户该升级为用于向停车场pa入库的条件而在尊重用户的意图的同时增加停车场pa的驻车台数,能够有效地活用停车场pa。需要说明的是,自主行驶等级的变更、即升级本身也可以在向停车场pa入库之后进行。
[0083]
另外,在向停车场pa入库之后需要变更车辆m的自主行驶等级时,处理部426可以设定成该自主行驶等级的变更成为带期限的变更(即,暂时性的变更)。由此,能够抑制自主行驶等级的变更,即用于更新软件的成本,同时能够增加停车场pa的驻车台数。需要说明的是,软件的更新费用也可以由停车场管理装置400的管理者(即,停车场pa的经营者)承担。另外,当用户希望进行永久性的升级(update)而不是暂时性的升级时,其更新费用可以由用户承担。另外,也可以考虑到即使是永久性的升级,但是为应停车场pa侧的要求进行升级更新时,从由用户承担的费用中进行折扣一部分费用。
[0084]
如以上说明那样,从有效地活用停车场pa的观点来看,停车场管理装置400能够根据车辆m的自主行驶等级决定车辆m的驻车位置,结果,能够有效地运用停车场pa。
[0085]
另外,处理部426决定车辆m的驻车位置时,例如参照停车场地图信息442等而决定直到所决定的驻车位置为止的适合的路径,并将所决定的路径借助通信部410而发送到车辆m。在接收到路径的车辆m中,行动计划生成部130生成基于所接收的路径的目标轨道,且
行动控制部140被控制成使车辆m按照通过行动计划生成部130生成的行动计划来行动。由此,车辆m被引导到作为通过停车场管理装置400来决定的驻车位置的驻车空间ps,而在该驻车空间ps驻车。
[0086]
另外,处理部426关于在停车场pa内驻车中的车辆m,在因自主行驶等级的变更等因素而变更其驻车位置的情况下,基于变化后的自主行驶等级等再次决定驻车位置,并且决定到该驻车位置为止的适合的路径,并将所决定的路径借助通信部410而发送到车辆m即可。另外,当车辆m的自主行驶等级高时,如上所述,处理部426也可以仅发送所决定的驻车位置。
[0087]
[第一控制例的处理流程]
[0088]
以下,用流程图来说明基于第一控制例的、停车场管理装置400的一系列的处理流程。图6是表示停车场管理装置400的一系列的处理流程的流程图。本流程图的处理可以以规定的周期反复进行。
[0089]
首先,获取部422借助通信部410而获取要向停车场pa入库的车辆m的自主行驶等级信息(步骤s10)。接着,为了使该车辆m向停车场pa入库,判定是否需要进行自主行驶等级的变更(步骤s12)。在需要进行自主行驶等级的变更的情况下(步骤s12的“是”),处理部426借助通信部410而询问要向停车场pa入库的车辆m的用户的终端装置300可否变更车辆m的自主行驶等级(步骤s14)。针对该询问,如果无法从用户的终端装置300获得允许的通知(步骤s16的“否”),则停车场管理装置400结束图6所示的流程图的处理。另一方面,相对于该询问,如果从用户的终端装置300获得允许的通知(步骤s16的“是”),则使车辆m的自主行驶等级变更(步骤s18)。优选将该变更设定为带期限的变更。该期限例如可以是从停车场pa出库为止的期间,也可以是规定的期间(例如,几个小时)。
[0090]
然后,处理部426基于车辆m的自主行驶等级来决定使车辆m驻车的驻车位置(步骤s20),并在该驻车位置驻车。接着,判断车辆m在驻车中的自主行驶等级是否发生变化(步骤s22)。判定为车辆m在驻车中的自主行驶等级没有发生变化时(步骤s22的“否”),停车场管理装置400结束图6所示的流程图的处理。
[0091]
另一方面,当判定为车辆m在驻车中的自主行驶等级发生变化时(步骤s22的“是”),处理部426重新决定车辆m的驻车位置(步骤s24),并借助通信部410而通知用户的终端装置300所决定的驻车位置(步骤s26),结束图6所示的流程图的处理。
[0092]
需要说明的是,相对于上述处理流程而言另外地,处理部426也可以如上所述,基于停车场pa的利用状况来使局部驻车区域的分布发生变动。
[0093]
[第二控制例]
[0094]
接着,对停车场管理装置400的第二控制例进行说明。在第一控制例中,基于向停车场pa入库时从车辆m获取的自主行驶等级信息,决定使该车辆m驻车的驻车位置。另一方面,在第二控制例中,车辆m在停车场pa驻车之后,基于从车辆m获取的自主行驶等级信息,决定(变更)驻车位置。由此,能够进行将驻车中的车辆m的驻车位置变更为停车场pa内的其他驻车位置的再驻车,所谓的再次驻车。
[0095]
例如,设想如下场景:与低的自主行驶等级的分类(例如,分类c)对应的局部驻车区域为占满车,但在与更高的自主行驶等级的分类(例如,分类b)对应的局部驻车区域存在空位的状况下,低的自主行驶等级的新的车辆(例如,分类c)试图向停车场pa入库、驻车。在
该状态下,与低的自主行驶等级的分类对应的局部驻车区域为占满车,该新的车辆无法驻车。然而,如果通过软件的更新等,能够提升已经驻车中的分类c的车辆m的自主行驶等级的分类(例如,从分类c升到分类b),并使该车辆m移动(再次驻车)到分类b的局部驻车区域中,则能够使该车辆m驻车的局部驻车区域产生空位。其结果,能够使新的车辆m在因再次驻车而出现空位的局部驻车区域驻车,能够有效地活用停车场pa。
[0096]
可以考虑到当提升自主行驶等级时,更新软件的对象车辆当然优先选择与软件的更新对应的车辆,例如,即使是同一软件,也优先选择更新时间短的车辆(重写速度快)来作为选项。
[0097]
于是,在这种场景下,车辆m向停车场pa入库之后,需要移动该车辆m时,处理部426指示车辆m进行自主行驶等级的变更。由此,若在停车场pa内需要使驻车中的车辆m移动,则停车场管理装置400指示车辆m的自主行驶等级的变更,因此能够提高停车场pa的便利性,并且能够提高整个停车场pa的利用效率,能够有效地活用停车场pa。
[0098]
另外,如上述第一控制例所述那样,存在如下情况:基于自主行驶等级信息进行的车辆m的分类至少存在两个分类以上,且将分类相同的车辆m彼此汇总到一起地在停车场pa内的特定的局部驻车区域驻车。在这种条件下,当车辆m需要在分别与不同的分类对应的两个局部驻车区域而移动时,处理部426优选指示该车辆m进行自主行驶等级的变更。即,当需要跨两个不同的分类而移动时,停车场管理装置400指示自主行驶等级的变更,对不需要进行自主行驶等级的变更的车辆m不进行任何指示,因此能够抑制停车场pa的运用负荷增加。
[0099]
自主行驶等级的变更可以包括例如提升自主行驶等级的变更、以及降低自主行驶等级的变更。在此,处理部426优选在需要使车辆m跨不同的分类而移动时,优先指示降低自主行驶等级的变更。
[0100]
与提升自主行驶等级的变更相比,下降的变更容易。因此,通过停车场管理装置400优先指示容易的降低自主行驶等级的变更,例如,能够使从指示后到完成自主行驶等级的变更为止的时间短,能够提高停车场pa的便利性。
[0101]
需要说明的是,当不存在能够指示自主行驶等级的降低的车辆m时,停车场管理装置400可以指示提升自主行驶等级的变更。提升自主行驶等级的变更例如是车辆m的软件的更新,降低自主行驶等级的变更是使车辆m的功能的一部分停止,在这种情况下,能够容易地变更自主行驶等级,但变更并不限定于这种例子。另外,在此,“软件的更新”不仅包括实际软件的更新(重写),还包括更新完的软件无效时,将该软件设为有效(激活)的情况。
[0102]
[第二控制例的处理流程]
[0103]
以下,用流程图说明基于第二控制例的、停车场管理装置400的一系列的处理流程。图7是表示停车场管理装置400的一系列的处理流程的流程图。本流程图的处理可以以规定的周期反复进行。
[0104]
首先,获取部422借助通信部410而获取在停车场pa驻车中的车辆m的自主行驶等级信息(步骤s30)。接着,判定部424判定是否需要进行驻车中的车辆m的移动(步骤s32)。当判定为不需要进行驻车中的车辆m的移动时(步骤s32的“否”),停车场管理装置400结束图7所示的流程图的处理。
[0105]
当判定为需要进行驻车中的车辆m的移动时(步骤s32的“是”),停车场管理装置400判定是否需要进行驻车中的车辆m的自主行驶等级的变更(步骤s34)。当判定为不需要
进行驻车中的车辆m的自主行驶等级的变更时(步骤s34的“否”),转换到步骤s42的处理。
[0106]
当需要进行自主行驶等级的变更时(步骤s34的“是”),处理部426借助通信部410而向驻车中的车辆m的用户的终端装置300询问可否进行车辆m的自主行驶等级的变更(步骤s36)。针对该询问,如果没有从用户的终端装置300获得允许的通知(步骤s38的“否”),则停车场管理装置400结束图7所示的流程图的处理。
[0107]
另一方面,针对该询问,如果从用户的终端装置300获得允许的通知(步骤s38的“是”),则变更车辆m的自主行驶等级(步骤s40)。然后,处理部426基于车辆m的自主行驶等级决定使车辆m驻车的驻车位置(步骤s42),在该驻车位置驻车,并结束结束图7所示的流程图的处理。
[0108]
需要说明的是,到此为止所述的自主行驶等级始终是基于停车场pa内的车辆m的自主行驶的等级得到的等级。通过采用停车场pa内的自主行驶等级,能够在停车场pa内进行适当的自主行驶。
[0109]
上述实施方式与所谓的车辆的驻车时间对应地设定驻车位置。然而,本发明的思想并不限定于这种实施方式,还适用于包括车辆在内的移动体(例如,机器人等)。即,本发明也包括在收容所谓的移动体的收容区域内使目标收容位置变更的情况。在该思考方式下,“驻车”扩展到“停止”的概念,“行驶”扩展到“移动”的概念,实施方式的“停车场管理装置”扩展到“收容区域管理装置”的概念。另外,“驻车区域”是占据了作为收容区域的停车场的一部分的区域,因此扩展到“局部收容区域”的概念。另外,再次驻车包括“将停止中的移动体的收容位置变更为收容区域内的其他收容位置的再次停止”或者“停止中的移动体移动到收容区域内的其他收容位置后再次停止”的动作。
[0110]
以上,用实施方式说明用了实施本发明的方式,但本发明并没有对这种实施方式做任何限定,在不脱离本发明的要旨的范围内,能够进行各种变形、替换。
[0111]
例如,在上述实施方式中,对当需要进行驻车中的车辆m的移动(即,需要再次驻车)而需要进行车辆m的自主行驶等级的变更时,变更车辆m的自主行驶等级的例子进行了说明,但并不限于此。例如,可以考虑到在具有多个上下车区域的停车场中,有时必须将车辆m移动到若不提升自主行驶等级则无法到达的上下车区域的情况。即,还可以考虑到在车辆m的驻车位置与成为移动目的地的上下车区域之间,存在若不提升自主行驶等级否则无法进入的区域。在这种情况下,在进行到成为移动目的地的上下车区域为止的移动时(例如,通过若不提高自主行驶等级否则无法进入的区域时),可以变更车辆m的自主行驶等级。
[0112]
另外,在本说明书中至少记载了以下事项。需要说明的是,尽管在括号内示出了上述实施方式中的相应构成要素等,但并不限定于此。
[0113]
(1)一种收容区域管理装置(停车场管理装置400),其对收容移动体(车辆m)的收容区域(停车场pa)进行管理,用于使所述移动体移动到所述收容区域内的规定的收容位置,
[0114]
所述收容区域管理装置具备:
[0115]
获取部(获取部422),其获取与所述移动体能够进行的自主移动有关的自主移动等级信息;以及
[0116]
处理部(处理部426),其在所述移动体进入所述收容区域后,需要所述移动体在所述收容区域内移动时,指示所述移动体进行自主移动等级的变更。
[0117]
根据(1),当移动体进入收容区域后,需要移动体移动时,指示变更移动体的自主移动等级,因此能够提高收容区域的便利性,并且提高整个收容区域的利用效率,有效地活用收容区域。
[0118]
(2)根据(1)所述的收容区域管理装置,其中,
[0119]
在所述收容区域中收容的各移动体基于该移动体的自主移动等级而被分类为预先准备的两个以上的分类中的任一分类,并且该分类相同的移动体彼此被汇总到一起地收容到所述收容区域内的特定的局部收容区域中,
[0120]
所述处理部当需要移动体在分别与不同的分类对应的两个局部收容区域移动时,指示该移动体进行所述自主移动等级的变更。
[0121]
根据(2),当需要跨两个不同的分类而移动时,指示自主移动等级的变更,对不需要进行变更的移动体不进行任何指示,因此能够抑制收容区域的运用负荷增加。
[0122]
(3)根据(2)所述的收容区域管理装置,其中,
[0123]
所述自主移动等级的变更包括提升所述自主移动等级的变更、以及降低所述自主移动等级的变更,
[0124]
所述处理部当需要所述移动体跨所述不同的分类而移动时,优先指示降低所述自主移动等级的变更。
[0125]
根据(3),通过优先指示容易的降低变更,能够使从指示到完成变更为止的时间短,能够提高收容区域的便利性。
[0126]
(4)根据(3)所述的收容区域管理装置,其中,
[0127]
提升所述自主移动等级的变更是指所述移动体的软件的更新,
[0128]
降低所述自主移动等级的变更是指使所述移动体的功能的一部分停止。
[0129]
根据(4),能够容易地变更自主移动等级。
[0130]
(5)根据(1)至(4)中任一项所述的收容区域管理装置,其中,
[0131]
所述自主移动等级是基于所述移动体在所述收容区域内自主移动的等级而得出的等级。
[0132]
根据(5),通过采用基于在所述收容区域内的自主移动的等级得出的自主移动等级,能够使移动体在收容区域内进行适当的自主移动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
