基于gnss和电子地图拓扑结构的列车定位系统及方法
技术领域
1.本发明涉及列车定位技术,尤其是涉及一种基于gnss和电子地图拓扑结构的列车定位系统及方法。
背景技术:
2.列车自动保护系统是确保列车安全运行,实现超速防护的关键设备,列车定位技术是列车自动保护系统实现行车控制和状态监测的重要依据。对高速铁路列车精密定位的研究对优化铁路运营效率,提高铁路运营安全系数具有重要意义。
3.目前铁路行业中普遍应用的定位方法是ctcs
‑
2/3级系统列车控制系统中采用的基于轮径速度传感器、轨道电路和实体应答器的定位方法。这种传统的定位方法依靠在铁路线路上安装大量的应答器和铺设轨道电路来实现列车占用检测,极大的增加了铁路建设成本和维护成本。
4.基于gnss/ins组合导航定位方法目前是国际研究的热门,该方法将普通车载导航算法应用到铁路系统中,车载gnss/ins组合导航系统实时输出列车定位信息,并将定位信息与车载电子地图中预设的参考点进行匹配和投影计算得到列车当前的里程数。gnss卫星定位系统的引入大大减少了列车定位算法对地面设备的依赖,也提高了列车实时定位的精度。
5.传统地图匹配方法包括点到点的地图匹配算法、点到线的地图匹配算法以及线到线的地图匹配算法,其中点到点的地图匹配算法具有算法简单、易于实现的优点,但匹配精度较差。点到线的地图匹配算法和线到线的地图匹配算法虽然匹配精度高,但算法复杂,实时性较差。
6.因此如何将卫星定位和电子地图相结合来实现列车精确定位,成为需要解决的技术问题。
技术实现要素:
7.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于gnss和电子地图拓扑结构的列车定位系统及方法。
8.本发明的目的可以通过以下技术方案来实现:
9.根据本发明的一个方面,提供了一种基于gnss和电子地图拓扑结构的列车定位系统,包括gnss卫星定位接收机模块、卡尔曼滤波器模块、地图匹配算法模块和车载电子地图模块;所述的gnss卫星定位接收机模块通过卡尔曼滤波器模块与地图匹配算法模块连接,所述的地图匹配算法模块与车载电子地图模块连接;
10.所述的地图匹配算法模块将卡尔曼滤波器模块输出的列车定位数据精确匹配到车载电子地图模块的电子地图中某一条轨道片段上,从而实现列车精确定位。
11.作为优选的技术方案,所述的gnss卫星定位接收机模块安装在列车车头位置,用于负责实时接收gnss导航系统的定位信号,解算列车实时定位数据并输出给卡尔曼滤波器
模块。
12.作为优选的技术方案,所述的gnss卫星定位接收机模块的输出数据是一系列代表列车位置的经纬度信息,记输出数据为r
gnss
(t)=(l
on
(t),l
at
(t)),式中l
on
(t)表示t时刻列车定位经度方向定位数据,l
at
(t)表示t时刻列车定位纬度方向定位数据。
13.作为优选的技术方案,所述的卡尔曼滤波器模块用于对gnss卫星定位接收机模块输出的列车定位数据进行滤波处理,剔除定位数据中的无效值,并将滤波后列车定位数据和协方差矩阵输出给地图匹配算法模块。
14.作为优选的技术方案,所述的卡尔曼滤波器模块的滤波处理过程具体如下:
15.k 1时刻,卡尔曼滤波器收到gnss卫星定位接收机模块输入的定位数据z
k 1
,卡尔曼滤波器模块首先依据gnss卫星定位接收机模块的工作状态、k 1时刻卡尔曼滤波器的预测协方差矩阵p
k 1/k
和上一时刻有效定位数据x
k/k
对定位数据进行数据有效性判断;若判断数据无效,则剔除该定位数据;若判断数据有效,则将定位数据带入滤波器进行位置校正计算;
16.在输入数据有效的情况下,卡尔曼滤波器模块将校正后的列车定位数据x
k 1/k 1
和校正协方差矩阵p
k 1/k 1
输出给地图匹配算法模块。
17.作为优选的技术方案,所述的车载电子地图模块为由车载高精度定位测量系统在列车所行驶轨道上测量得到的大量参考点经纬度信息构成的电子地图数据库。
18.作为优选的技术方案,所述的电子地图数据库采用分级拓扑结构建立电子地图的索引结构,其中三级结构分别是车站、轨道和轨道片段。
19.作为优选的技术方案,所述的电子地图的分级拓扑结构包括:
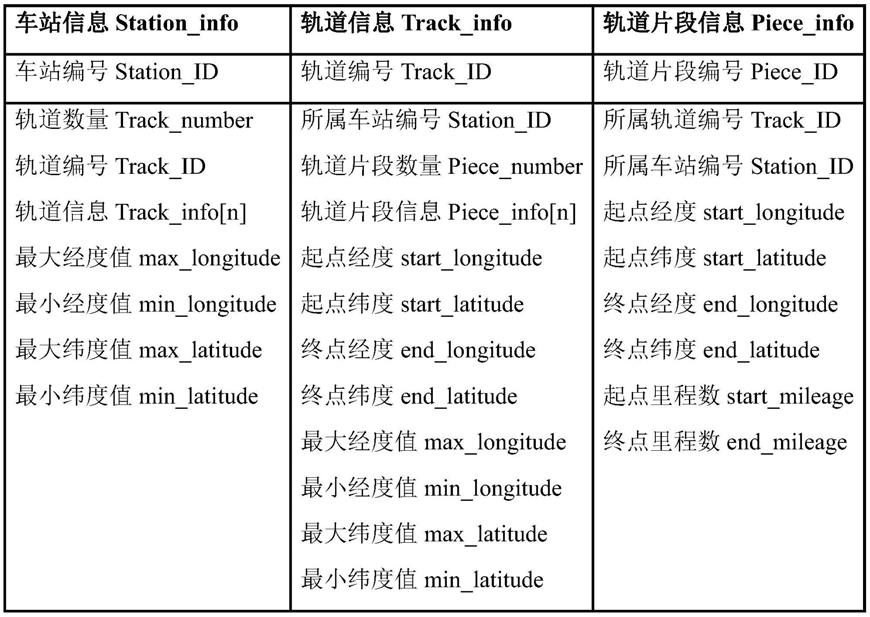
20.一级车站结构,储存包括以下信息:车站编号、车站下辖轨道数量及轨道编号、车站管辖的经纬度范围;
21.二级轨道结构,储存以下信息:轨道编号,轨道上级车站编号,轨道起点经纬度和里程数,轨道终点经纬度和里程数,轨道管辖的经纬度范围,轨道下辖所有轨道片段编号;
22.三级轨道片段结构,存储以下内容:轨道片段编号,上级轨道编号,上级车站编号,起点经纬度和里程数,终点经纬度和里程数。
23.作为优选的技术方案,所述的地图匹配算法模块的匹配过程具体为:
24.第一步,计算定位数据的置信区间误差椭圆;
25.第二步,筛选满足条件的待匹配轨道片段;
26.第三步,计算带匹配轨道片段的匹配误差函数,选取误差函数最小的轨道片段作为匹配结果;
27.第四步,将二维定位数据转换为一维里程数据作为列车定位系统的输出。
28.根据本发明的另一个方面,提供了一种基于gnss和电子地图拓扑结构的列车定位方法,包括以下步骤:
29.步骤101:获取列车当前定位数据;
30.步骤102:判断定位数据是否有效,若有效,执行步骤103;否则,执行步骤109;
31.步骤103:将定位数据输入卡尔曼滤波器模块进行滤波校正;
32.步骤104:建立置信区间筛选候选轨道片段;
33.步骤105:判断候选轨道片段数量是否大于0,若为是,执行步骤106;否则,执行步
骤109;
34.步骤106:逐个计算定位点到候选轨道片段的匹配误差函数值;
35.步骤107:选取函数值最小的轨道片段作为匹配结果;
36.步骤108:将二维定位数据转换为一维里程数据作为列车定位系统的输出;
37.步骤109:当前卫星定位不可用,等待下一组数据。
38.与现有技术相比,本发明具有以下优点:
39.1)本发明减少了定位技术对地面设备的依赖,减轻地方铁路的建设成本和人力维护成本。
40.2)本发明利用电子地图分级拓扑结构,有效避免了在定位过程中大量参考点逐个比较造成的计算资源浪费,实现了地图匹配算法的实时性和准确性兼顾。
41.3)本发明易于实现,只需地方铁路使用高精度定位设备进行一次定位测量,后续列车就可以依靠卫星定位接收设备和车载电子地图实现定位算法。
附图说明
42.图1为本发明定位系统的结构示意图;
43.图2为本发明轨道片段处理的示意图;
44.图3为本发明的工作流程图。
具体实施方式
45.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
46.如图1所示,本发明基于gnss和电子地图拓扑结构的列车定位系统,包括gnss卫星定位接收机模块、卡尔曼滤波器模块、地图匹配算法模块和车载电子地图模块;所述的gnss卫星定位接收机模块通过卡尔曼滤波器模块与地图匹配算法模块连接,所述的地图匹配算法模块与车载电子地图模块连接;所述的地图匹配算法模块将卡尔曼滤波器模块输出的列车定位数据精确匹配到车载电子地图模块的电子地图中某一条轨道片段上,从而实现列车精确定位。
47.所述gnss卫星定位接收机模块是列车定位算法的输入模块。接收机安装在列车车头位置,负责实时接收gnss导航系统的定位信号,解算列车实时定位数据并输出给卡尔曼滤波器模块。gnss卫星定位接收机模块的输出数据是一系列代表列车位置的经纬度信息,记输出数据为r
gnss
(t)=(l
on
(t),l
at
(t)),式中l
on
(t)表示t时刻列车定位经度方向定位数据,l
at
(t)表示t时刻列车定位纬度方向定位数据。
48.所述卡尔曼滤波器模块负责对gnss卫星定位接收机模块输入的列车定位数据进行滤波处理,剔除定位数据中的无效值,并将滤波后列车定位数据和协方差矩阵输出给地图匹配算法模块。
49.卡尔曼滤波器计算公式为:
50.x
k 1/k
=a
k 1/k
x
k/k
(1)
[0051][0052]
x
k 1/k 1
=x
k 1/k
k
k 1
(z
k 1
‑
h
k 1
x
k 1/k
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0053]
p
k 1/k 1
=(i
‑
k
k 1
h
k 1
)p
k 1/k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0054][0055]
k 1时刻,卡尔曼滤波器收到gnss卫星定位接收机模块输入的定位数据z
k 1
,卡尔曼滤波器模块首先依据gnss卫星定位接收机的工作状态、k 1时刻卡尔曼滤波器的预测协方差矩阵p
k 1/k
和上一时刻有效定位数据x
k/k
对定位数据进行数据有效性判断。若判断数据无效,则剔除该定位数据;若判断数据有效,则将定位数据带入滤波器进行位置校正计算。
[0056]
卡尔曼滤波器的状态变量为:
[0057][0058]
常系数状态转移矩阵为:
[0059][0060]
测量矩阵为:
[0061]
h
k 1
=[1 1 0 0]
t
[0062]
在输入数据有效的情况下,卡尔曼滤波器模块将校正后的列车定位数据x
k 1/k 1
和校正协方差矩阵p
k 1/k 1
输出给地图匹配算法模块。
[0063]
所述电子地图模块是指由车载高精度定位测量系统在列车所行驶轨道上测量得到的大量参考点经纬度信息构成的电子地图数据库。该数据库采用分级拓扑结构建立电子地图的索引结构,三级结构分别是车站(station)、轨道(track)和轨道片段(piece)。轨道片段(piece)是电子地图最基础的结构,每个轨道片段长约50~100m,由一个起点和终点组成。由于采样足够密集,可以认为两个参考点之间的轨道为直线。电子地图模块负责为地图匹配算法模块提供数据支持。
[0064]
电子地图分级拓扑结构包括:一级车站结构,储存包括以下信息:车站编号、车站下辖轨道数量及轨道编号、车站管辖的经纬度范围(即所有轨道片段中经纬度的最大值和最小值)。二级轨道结构,储存以下信息:轨道编号,轨道上级车站编号,轨道起点经纬度和里程数,轨道终点经纬度和里程数,轨道管辖的经纬度范围(即所有轨道片段中经纬度的最大值和最小值),轨道下辖所有轨道片段编号。三级轨道片段结构,存储以下内容:轨道片段编号,上级轨道编号,上级车站编号,起点经纬度和里程数,终点经纬度和里程数,如表1所示。
[0065]
表1
[0066][0067]
所述地图匹配算法模块负责将卡尔曼滤波器模块输出的列车定位数据精确匹配到电子地图中某一条轨道片段上。匹配过程可以分为四步进行:第一步,计算定位数据的置信区间误差椭圆;第二步,筛选满足条件的待匹配轨道片段;第三步,计算带匹配轨道片段的匹配误差函数,选取误差函数最小的轨道片段作为匹配结果;第四步,将二维定位数据转换为一维里程数据作为列车定位算法的输出。
[0068]
1)定位数据置信区间误差椭圆,以下简称误差椭圆。
[0069]
列车卫星定位的数据受到很多误差的影响,包括卫星相关的卫星轨道误差、卫星钟差和相对论效应等,以及卫星信号在大气层传播过程中受到的电离层、对流层延时,卫星信号的遮挡、多路径效应等,还包括接收机相关的接收机钟差、接收机硬件延迟以及测量噪声等。在二维平面上,定位误差表现为无数个等概率密度的误差椭圆。椭圆的大小取决于定位数据的协方差矩阵。
[0070]
以卡尔曼滤波器模块输出的校正后卫星定位数据为圆心,沿经纬度方向选取坐标轴,构建坐标系,则误差椭圆的相关参数如下:
[0071][0072]
上式中,a表示误差椭圆的半长轴,b表示误差椭圆的半短轴,α表示误差椭圆相对
经度方向的偏转角;σ
lon
表示定位数据经度方向的标准差,σ
lat
表示定位数据纬度方向的标准差,σ
lonlat
表示定位数据的协方差。s表示误差椭圆的置信水平,此处选取置信水平为95%,则s=5.991。
[0073]
2)待匹配轨道片段集合
[0074]
通过比较列车当前定位数据与电子地图中所有车站的管辖经纬度范围,确定列车当前可能所处的车站。通过比较列车可能所处的车站的下辖所有轨道的管辖经纬度范围,确定列车当前可能所处轨道。在误差椭圆选取合理的情况下,列车可能所处的车站数和轨道数应不超过2个。
[0075]
比较列车可能所处轨道下的所有轨道片段,若轨道片段的起点或终点进入误差椭圆的范围,则标记该轨道片段为待匹配轨道片段,所有满足条件的轨道片段组成的集合称为待匹配轨道片段集合。若当前时刻没有轨道片段进入误差椭圆范围,则认为地图匹配失败,退出地图匹配算法。若一段时间内持续没有轨道片段进入误差椭圆范围,则重置卡尔曼滤波器并调整误差椭圆的选取。
[0076]
3)点到线的地图匹配误差函数
[0077]
在获得候选轨道片段的集合后,计算每个轨道片段的距离偏差和方向偏差。距离偏差是指定位数据到由轨道片段起点和终点连成的线段的垂直距离,方向偏差是指卡尔曼滤波器模块输出的速度分量与轨道片段矢量之间的夹角。距离偏差与方向偏差乘以各自的权重后得到地图匹配的误差函数值,误差函数值最低的轨道片段作为列车地图匹配的结果。误差函数如下:
[0078]
e=e
d
×
e
φ
=λ
d
d
line
×
tλ
φ
cosφ
[0079]
式中,e
d
表示距离偏差,e
φ
表示方向偏差,λ表示权重,t是辅助参数。
[0080]
距离偏差计算:
[0081]
以待处理的轨道片段起始点为原点,经纬度方向为坐标轴建立坐标系,以向量方式表示各点和线段,如图2所示。
[0082]
图中a点表示坐标原点,也是轨道片段的起点,其经纬度信息为(lon
a
,lat
a
),b点表示轨道片段的终点,其经纬度信息为(lon
b
,lat
b
),c点表示待匹配的卫星定位点,其经纬度信息为(lon
c
,lat
c
),向量向量由点c向向量做投影,得到交点d,利用向量的点乘和叉乘计算向量和向量的长度:
[0083][0084][0085]
其中表示向量在上投影的长度,如果长度超过了表明c点投影到了线段ab之外,该轨道片段的匹配失败。如果c点投影到了ab线段之间,则表示该
轨道片段的距离偏差。
[0086]
方向偏差计算
[0087]
轨道片段的方向即轨道片段的矢量方向,取卡尔曼滤波器模块输出状态变量中的速度分量,计算与轨道片段方向的夹角:
[0088][0089]
由于列车运行速度较低时,受卫星信号接收机及列车车身抖动等影响,卫星定位数据计算得到的航向角会有较大的偏差和跳变,因此设定辅助参数t:
[0090][0091]
式中,v为列车运行的速度,v
low
为列车低速阈值,其取值由卫星信号接收机的性能决定。
[0092]
4)基于gnss导航系统和电子地图拓扑结构的列车定位方法的输出
[0093]
选取候选轨道片段中匹配误差函数值最小的轨道片段作为地图匹配的结果进行点到线的地图匹配计算,其过程就是计算卫星定位点c投影到轨道片段ab上的d点所在一维轨道线路上的里程数,作为定位算法的输出结果。
[0094]
轨道片段起点a与终点b在一维轨道线路中的里程数可以在电子地图数据库中得到,分别记为l
a
和l
b
。根据几何比例关系,可以得到如下的关系式:
[0095][0096][0097]
l
d
为卫星定位数据在轨道片段ab上的匹配点的里程数,至此列车定位过程结束。
[0098]
如图3所示,本发明基于gnss和电子地图拓扑结构的列车定位方法,包括以下步骤:
[0099]
步骤101:获取列车当前定位数据;
[0100]
步骤102:判断定位数据是否有效,若有效,执行步骤103;否则,执行步骤109;
[0101]
步骤103:将定位数据输入卡尔曼滤波器模块进行滤波校正;
[0102]
步骤104:建立置信区间筛选候选轨道片段;
[0103]
步骤105:判断候选轨道片段数量是否大于0,若为是,执行步骤106;否则,执行步骤109;
[0104]
步骤106:逐个计算定位点到候选轨道片段的匹配误差函数值;
[0105]
步骤107:选取函数值最小的轨道片段作为匹配结果;
[0106]
步骤108:将二维定位数据转换为一维里程数据作为列车定位系统的输出;
[0107]
步骤109:当前卫星定位不可用,等待下一组数据。
[0108]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替
换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

