1.本实用新型属于轮缘参数检测技术领域,更具体地说,涉及一种用于测量车轮轮缘参数的装置。
背景技术:
2.随着我国轨道交通的快速发展,列车在线运行的安全问题也日益显著。轮对是列车与钢轨相接触的部分。轮对保证了机车在钢轨上的运行和转向,承受来自列车的全部静、动载荷,并把它传递给钢轨,并将因线路不平顺产生的载荷传递给列车车辆各零部件。此外,列车车辆的驱动和制动也是通过轮对起作用的。因此,轮对的状况直接关系到列车的运行质量和安全,对其尺寸参数的实时监测是保障列车安全行驶的重要措施。
3.传统技术中通常是采用人工测量和静态测量方法对车轮轮缘参数进行测量,检测精度较差,且检测效率低,从而促进了在线动态检测技术的研究与发展。对于轮对尺寸的在线检测技术,早期的方法是采用基于ccd图像测量技术进行测量,但该方法的系统结构布置较为复杂,且受振动、环境影响大。随着传感器技术的发展,激光测距得到了越来越广泛的应用,很多研究者开始将激光位移传感器应用于车轮轮缘参数的在线动态检测。
4.如,申请号为201610365458.6的申请案公开了一种列车轮对尺寸在线检测方法及其系统,该方法通过激光对射光电开关得到轮缘顶点圆直径和车速,通过涡流传感器定位轮缘最低点及到地面的高度,根据内外侧1d激光位移传感器探测到的车轮上面的点,得到该车轮踏面轮廓线,从而得到轮缘高、轮缘厚和轮径,但该申请案的检测精度有待进一步提高。
技术实现要素:
5.1.实用新型要解决的技术问题
6.本实用新型的目的在于克服采用现有方法对车轮轮缘参数进行测量存在的不足,提供了一种用于测量车轮轮缘参数的装置。采用本实用新型的技术方案可以对车轮轮缘参数进行在线测量,且其测量精度相对较高。
7.2.技术方案
8.为达到上述目的,本实用新型提供的技术方案为:
9.本实用新型的一种用于测量车轮轮缘参数的装置,包括安装于轨道内侧的第一激光位移传感器和第二激光位移传感器,其中第一激光位移传感器安装于车轮轮缘正下方,倾斜向上测量轮缘顶点至轮缘喉部的轮廓曲线,其感测头距离轨顶平面的距离为h1,与钢轨顶面中心的水平距离为l1,且其检测光束与平行于轨道方向的夹角为a1;所述第二激光位移传感器用于测量车轮内辋面至轮缘顶点,以及包含名义滚动圆在内的部分踏面轮廓,其感测头距离轨顶平面的距离为h2,与钢轨顶面中心的水平距离为l2,且其检测光束与垂直于轨道方向的夹角为b1,与平行于钢轨方向的夹角为b2。
10.更进一步的,所述第一激光位移传感器和第二激光位移传感器均采用二维激光位
移传感器,且两侧轨道内侧均安装有第一激光位移传感器和第二激光位移传感器。
11.更进一步的,所述第一激光位移传感器和第二激光位移传感器均安装于安装支架上,该安装支架包括底板、第一安装板和第二安装板,其中底板固定安装于轨道底部,第一安装板和第二安装板均固定安装于底板上,且第一安装板的安装角度及高度与第一激光位移传感器的安装角度和高度相对应,第二安装板的安装角度及高度与第二激光位移传感器的安装角度和高度相对应。
12.更进一步的,所述底板上固定安装有第一支撑板,第一安装板与第一支撑板固定相连,所述第一支撑板的下部沿竖直方向分布,其上部与第一支撑板的下部之间存在倾斜夹角,该夹角与第一激光位移传感器检测光束的倾斜角度a1相同。
13.更进一步的,所述第一安装板与第一支撑板通过轴承可转动相连,并通过螺栓进行紧固相连,且第一安装板上加工有微调螺纹孔。
14.更进一步的,所述底板上固定有第二支撑板,第二支撑板上安装有调节板,第二安装板支撑安装于调节板上,第二安装板的倾斜角度与第二激光位移传感器的倾斜角度a2相匹配。3.有益效果
15.采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
16.(1)本实用新型的一种用于测量车轮轮缘参数的装置,包括安装于轨道内侧的第一激光位移传感器和第二激光位移传感器,通过对两个激光位移传感器的安装位置和角度进行设计,并对其检测数据进行处理,从而可以对列车车轮的轮缘参数进行在线动态测量,且其测量精度较高。
17.(2)本实用新型的一种用于测量车轮轮缘参数的装置,通过对激光位移传感器的安装支架进行结构优化,从而既便于对激光位移传感器进行安装,同时还便于其安装角度的调节,有利于保证激光位移传感器的精确安装。
18.(3)本实用新型的一种用于测量车轮轮缘参数的装置,先通过安装于轨道内侧的两个激光位移传感器对车轮的轮廓线进行检测,提取两个激光位移传感器所测轮廓曲线中经过车轮法线或最接近车轮法线的轮廓曲线,然后进行有效数据的提取、曲线旋转和拼接、整合处理,从而得到待测车轮的轮廓曲线,根据机车车辆车轮轮缘踏面外形标准的规定即可直接计算得到轮缘高、轮缘厚和轮缘综合值三个参数。
附图说明
19.图1为2d激光位移传感器测量范围示意图;
20.图2为本实用新型的两个激光位移传感器的激光扫描范围示意图;
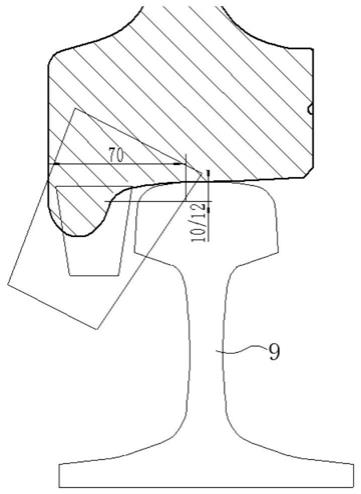
21.图3为第一激光位移传感器的布置方案示意图;
22.图4为第二激光位移传感器的布置方案示意图;
23.图5为两个激光位移传感器的布置方案示意图;
24.图6为本实用新型的安装支架的结构示意图;
25.图7为提取有效数据后的轮廓曲线;
26.图8为旋转后的轮廓曲线;
27.图9为拼接后的轮廓曲线。
28.示意图中的标号说明:
29.1、底板;101、加强筋;2、第二支撑板;3、调节板;4、第二安装板;5、第二轴承座;6、第一支撑板;7、第一安装板;701、固定孔;702、微调螺纹孔;8、第一轴承座;9、轨道;10、第一激光位移传感器;11、第二激光位移传感器。
具体实施方式
30.为进一步了解本实用新型的内容,现结合具体实施例对本实用新型作详细描述。
31.实施例1
32.结合图2
‑
图5,本实施例的一种用于测量车轮轮缘参数的装置,包括安装于轨道9内侧的第一激光位移传感器10和第二激光位移传感器11,其中第一激光位移传感器10安装于车轮轮缘正下方,倾斜向上测量轮缘顶点至轮缘喉部(第一激光位移传感器10的激光扫描范围需包含轮缘厚及轮缘综合值测量基点)的轮廓曲线,其感测头距离轨顶平面的距离为h1,与钢轨顶面中心的水平距离为l1,且其检测光束与平行于轨道9方向的夹角为a1;所述第二激光位移传感器11用于测量车轮内辋面至轮缘顶点,以及包含名义滚动圆在内的部分踏面轮廓,其感测头距离轨顶平面的距离为h2,与钢轨顶面中心的水平距离为l2,且其检测光束与垂直于轨道方向的夹角为b1,与平行于钢轨方向的夹角为b2。
33.上述第一激光位移传感器10和第二激光位移传感器11均采用二维激光位移传感器,其检测头之间沿平行于钢轨方向的距离为l3,且两侧轨道内侧均安装有第一激光位移传感器10和第二激光位移传感器11,从而可以对两侧车轮的轮缘参数进行测量。
34.2d激光位移传感器有两个方向的测量范围,分别称为x轴和z轴,x轴可以看作是测量的宽度范围,z轴可以看作是测量的长度范围,如图1所示为2d激光位移传感器的测量范围示意图,其x轴的测量范围为x1‑
x2,z轴的测量范围为z1‑
z2,即图示中的梯形区域,只有被测量物体落在梯形区域内才能测量轮廓线。本实施例中第一激光位移传感器10的测量范围小于第二激光位移传感器11。
35.其中,两个激光位移传感器的型号及安装位置和角度以满足测量范围要求,即满足第一激光位移传感器10倾斜向上测量轮缘顶点至轮缘喉部的轮廓曲线,第二激光位移传感器11用于测量车轮内辋面至轮缘顶点,以及包含名义滚动圆在内的部分踏面轮廓的要求。同时,为了便于轮廓曲线的提取,本实施例中sin a1=(r
‑
h1)/(z
a1
r sh),tan b2=(r
‑
h2)/((z
a1
r sh)cos a1 l3)。
36.上式中,若第一激光位移传感器10的感测头高于轨顶,则h1取正,反之取负;若第二激光位移传感器11的感测头高于轨顶,则h2取正,反之取负。z
a1
为第一激光位移传感器10测量范围的z轴最小值,r为待测规格车轮中新轮半径与磨耗到限车轮半径的中间值,即:r=(r
新轮
r
到限轮
)/2,sh为车轮允许轮缘高范围内的中间值,即sh=(sh
上限值
sh
下限值
)/2,sh
上限值
为某一规格车轮的轮缘高上限值,sh
下限值
为该规格车轮的轮缘高下限值。
37.实施例2
38.本实施例的一种用于测量车轮轮缘参数的装置,其结构基本同实施例1,更进一步的,所述第一激光位移传感器10和第二激光位移传感器11均安装于安装支架上,如图6所示,该安装支架包括底板1、第一安装板7和第二安装板4,其中底板1固定安装于轨道9底部,第一安装板7和第二安装板4均固定安装于底板1上,且第一安装板7的安装角度及高度与第一激光位移传感器10的安装角度和高度相对应,第二安装板4的安装角度及高度与第二激
光位移传感器11的安装角度和高度相对应。
39.具体的,所述底板1上固定安装有第一支撑板6,第一安装板7与第一支撑板6固定相连,所述第一支撑板6的下部沿竖直方向分布,其上部与第一支撑板6的下部之间存在倾斜夹角,该夹角与第一激光位移传感器10检测光束的倾斜角度a1相同。
40.本实施例中第一安装板7与第一支撑板6通过轴承可转动相连,并通过螺栓进行紧固相连,且第一安装板7上加工有微调螺纹孔702。具体的,第一支撑板6上安装有第一轴承座8,第一安装板7上安装有与第一轴承座8相匹配的调心轴承,且第一轴承座8的端部插入到调心轴承中,从而可以对第一安装板7的安装角度进行调节。当第一安装板7相对于第一支撑板6转动至合适位置时,将微调螺栓拧入微调螺纹孔702,当微调螺栓端部顶到第一支撑板6时继续拧紧微调螺栓,从而可以带动第一安装板7继续转动对第一安装板7与第一支撑板6的相对位置和角度进行微调,调节好之后通过四颗紧固螺栓(拧入固定孔701,固定孔701的尺寸大于紧固螺栓的尺寸)将第一安装座7与第一支撑板6紧固连接即可。第一安装座上有三个螺纹孔用于安装第一激光位移传感器10。
41.所述底板1上还固定有第二支撑板2,第二支撑板2上安装有调节板3,第二安装板4支撑安装于调节板3上,第二安装板4的倾斜角度与第二激光位移传感器11的倾斜角度a2相匹配。其中,第二安装板4与调节板3之间通过第二轴承座5可转动相连,且第二安装板4与调节板3之间的安装结构及安装角度调节方法同第一安装座7与第一支撑板6之间。
42.实施例3
43.本实施例的一种用于测量车轮轮缘参数的装置,其结构基本同实施例2,其区别主要在于:本实施例中第一支撑板6与底板之间以及第二支撑板2与调节板之间均设有加强筋101,从而有利于提高整个安装支架的结构稳定性。
44.实施例4
45.本实施例的一种用于测量车轮轮缘参数的装置,其结构同实施例3,采用本实施例的装置对列车车轮轮缘参数进行测量,具体包括以下步骤:
46.步骤一、轮廓线采集
47.当车轮经过时,控制两个激光位移传感器同时采集车轮踏面轮廓,其中第一激光位移传感器10采集车轮轮缘顶点至轮缘喉部的轮廓线,第二激光位移传感器11采集车轮内辋面至轮缘顶点,以及包含名义滚动圆在内的部分踏面轮廓线。采集轮廓曲线时,两个激光位移传感器以一定的频率(频率可以相同,也可以不相同)连续采集车轮经过时的所有轮廓曲线,采集得到的就是该车轮的原始轮廓曲线数据。本实施例中待测车轮直径规格为d=770
‑
840mm,sh=29mm,所用第一激光位移传感器10z轴测量范围的最小值z
a1
=57mm,h1=
‑
45mm,h2=
‑
1mm,l1=52.5mm,l2=200mm,l3=142.69mm,b1=30
°
,b2=50
°
,a1=67
°
。
48.步骤二、轮廓线的提取
49.提取两个激光位移传感器所测轮廓曲线中经过车轮法线或最接近车轮法线的轮廓曲线。
50.若要准确测量轮缘参数,必须从众多原始轮廓曲线中选取经过车轮法线的那两条轮廓曲线。经理论验证,当所测轮廓线偏离法线不多(如图5所示,该偏离量,即检测光束偏离于车轮圆心的距离δr小于车轮半径的5%即可)时,对车轮轮缘参数的影响较小,可以忽略不计。因此本实施例通过对两个激光位移传感器的安装位置及角度进行优化设计,从而
可以保证当第一激光位移传感器10测得车轮轮缘顶点在最小z轴测量点,即轮缘顶点的测量值为z
a1
时,不论所测车轮的直径和轮缘高如何,该轮廓线及此时第二激光位移传感器11所测轮廓线均经过车轮法线或在车轮法线附近。因此,此处轮廓线的提取方法为:读取第一激光位移传感器10所测轮廓线中轮缘顶点的距离值,当轮缘顶点的距离值为z
a1
或最接近z
a1
时,该轮廓线即为所提取的第一激光位移传感器10的轮廓线,然后提取同一时刻第二激光位移传感器11所测轮廓线,即为所需的第二条轮廓线。
51.步骤三、提取有效数据
52.滤除两条轮廓线中的无效数据,从而得到提取有效数据后的轮廓线。
53.在2d激光位移传感器所测轮廓线的数据中,只有测量范围内有轮廓线才能测得有效数据,若测量范围内无轮廓线,则测得的均为无效数据。另外,当有其他因素干扰时,会使测得的轮廓数据中出现突变数据,突变数据也是无效数据。因此,需要对所选的两条轮廓线中的有效数据进行提取。提取有效数据的两个准则是:一是提取测量范围内的数据,例如第一2d激光位移传感器的z轴测量范围为z
a1
‑
z
a2
,不在此范围内的数据均为无效数据;二是根据曲线的特点排除突变数据,例如曲线呈下降趋势时,突然出现增大的数据,该数据即为突变数据,需排除。提取有效数据后的轮廓曲线如图7所示,其中曲线(a)为第一激光位移传感器10所测轮廓线,曲线(b)为第二激光位移传感器11所测轮廓线。
54.步骤四、曲线旋转
55.提取到有效数据后,即可得到组成轮廓线的各个点坐标(x、y),第一激光位移传感器10所测轮廓线不需要旋转,将第二激光位移传感器11所测轮廓线进行逆时针旋转,旋转公式为:
56.x=(x1‑
x0)cosα
‑
(y1‑
y0)sinα x0
57.y=(x1‑
x0)sinα (y1‑
y0)cosα y0
58.式中:(x,y)为旋转之后曲线的坐标,(x1,y1)为旋转之前曲线的坐标,(x0,y0)是旋转中心的坐标,α是旋转角度。旋转之后两个激光的轮廓曲线如图8所示。其中,曲线(a)为第一激光位移传感器10所测轮廓线,曲线(b)为第二激光位移传感器11所测轮廓线。
59.由图7可以看出,理论上来说,第二激光位移传感器11所测轮廓线应逆时针旋转b1角度,但由于车轮行进的过程中存在蛇形,蛇形会导致车轮内辋面与轨道方向存在一定的蛇形偏角,从而影响检测结果。因此,本实施例中不再按照b1角度进行旋转,实际旋转角度会随不同车轮而不同。但第二激光位移传感器11所测轮廓曲线中内辋面段仍为直线(图7中曲线(b)中的直线段),因此本实施例先根据直线方程计算出旋转角度α。
60.第二激光位移传感器11所测轮廓曲线中车轮内辋面的直线段相对于水平方向的倾斜角度b(将内辋面的直线段旋转为水平的旋转角度)可采用如下方法计算得到:取曲线(b)上与内辋面段相对应的倾斜直线上的任意两点(比如该倾斜直线上的两个端点(x1,y1)和(xn,yn)),即可计算其倾斜角度:
[0061][0062]
多次取点进行计算,得到一系列的角度正切值tanb1,tanb2,tanb3,
……
,tanbk,再对这些正切值取平均值,得到:
[0063]
tan b=(tan b1 tan b2 tan b3 ...... tan bk)/k
[0064]
因此,将内辋面段直线旋转为垂直时的旋转角度α取(90
‑
b)度,则旋转公式中:
[0065][0066]
步骤四、曲线拼接与整合
[0067]
以第一激光位移传感器10所测轮廓曲线的端点作为特征点,将第一激光位移传感器10所测轮廓曲线与第二激光位移传感器11所测经旋转后的轮廓曲线进行拼接,拼接完成后对拼接后的轮廓曲线数据进行坐标整合,坐标整合时取内辋面的平均值,并把该平均值整合为0,再以拼接点的x坐标和y坐标对接,拼接出连续的坐标曲线,拼接后的轮廓曲线如图9所示。
[0068]
从旋转后的轮廓曲线中可以看出,轮缘顶点处的y值变化较小,即曲线的斜率较小,所以,若以轮缘顶点为特征点进行拼接,很难找准轮缘顶点的x坐标,最终会导致测量的轮廓厚(sd)与实际值相差很大。而轮缘顶点附近的y坐标却相差很小,因此,本实施例以第一激光位移传感器10所测轮廓曲线的端点作为特征点来进行拼接,而且该端点处的斜率相对较大,对轮缘参数的测量影响较小。
[0069]
本实施例中曲线的拼接方法具体为:获取第一激光位移传感器10所测轮廓曲线中的最大值(即轮缘顶点的y坐标)a1,以及轮廓曲线端点处的y坐标a2,然后获取第二激光位移传感器11所测轮廓曲线的最大值b1,再从第二激光位移传感器11所测轮廓线的轮缘内侧找到y坐标b2=b1‑
(a1‑
a2)的点x
b2
;以第二激光位移传感器11所测轮廓线上的(x
b2
,b2)为特征点,与第一激光位移传感器10所测轮廓线的端点相拼接,即得到从内辋面至轮缘喉部,以及包含名义流动圆在内的部分踏面轮廓曲线。
[0070]
若第二激光位移传感器11所测轮廓线上不存在y坐标b2=b1‑
(a1‑
a2)的点,则用以下公式计算所需点的x坐标:
[0071][0072]
式中,x
b2
为所求点的x坐标,(x1,y1),(x2,y2)为所求点左右两点的坐标,b2为所求点的y坐标。
[0073]
步骤五、计算轮缘参数
[0074]
得到轮廓曲线后,以《tb/t449
‑
2003机车车辆车轮轮缘踏面外形》中规定的测量基准计算轮缘高、轮缘厚和轮缘综合值三个参数。若某个轮缘参数的测量点处无测量值,采用下面的公式近似计算:
[0075][0076][0077]
其中,若知道某测量点的y坐标,求该点的x坐标时,用公式(1)进行近似计算,其中
y1和y2分别为大于及小于上述y坐标,且与该y坐标最接近的两个点的y坐标值,(x1,y1)、(x2,y2)即为对应两点的坐标。若知道某测量点的x坐标,求该点的y坐标时,用公式(2)进行近似计算,其中x1和x2分别为大于及小于上述x坐标,且与该x坐标最接近的两个点的x坐标值,(x1,y1)、(x2,y2)即为对应两点的坐标。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

