1.本发明涉及智能车辅助驾驶技术领域,更具体的说是涉及一种带有多模态触觉感知的智能汽车方向盘装置。
背景技术:
2.在过去的几年中,汽车行业取得了长足进步。许多数现代汽车已经具有了类似计算机架构的数字平台。由此产生的计算机控制系统和小工具不断推陈出新。驾驶员辅助系统已成为现代汽车的标配。同时,驾驶员的便捷驾驶和休闲娱乐需要愿望导致了智能座舱的出现,智能座舱往往配备了高度交互式的信息系统。近年来,设计师也变得更加关注驾驶员与汽车之间的交互,即人车交互。
3.然而,人类的认知水平是有限的,为了在各种因素的干扰下有效地完成任务,智能系统的辅助是不可或缺的。研究表明,分心驾驶是与醉酒驾驶相提并论的一种危险行为,分心驾驶包括四种:
4.1)视觉分心:任何导致驾驶员将视线从道路上移开的情况。
5.2)手动分心:任何导致驾驶员不把手放在方向盘上的任务。
6.3)音频干扰:任何会掩盖车内重要声音(例如警报器)或外部(例如救护车警报器)的噪音。
7.4)认知分心:任何导致认知负荷并降低驾驶员对主要驾驶任务的注意力的任务。数据显示2014年,在涉及驾驶员分心的机动车事故中,死亡人数为3179,受伤人数为431000。
8.因此,保证驾驶员与各种车载系统进行高效的短暂的交互,是一种行之有效的解决方案。有研究表明,在现有的视觉和听觉交互模式中添加触觉交互模式,将触觉信息作为一种交互通道可以使未来汽车人机交互技术的发展方向朝着更加人性化、安全化的方向发展。
技术实现要素:
9.有鉴于此,本发明提供了一种带有多模态触觉感知的智能汽车方向盘装置。
10.为了实现上述目的,本发明采用如下技术方案:
11.一种带有多模态触觉感知的智能汽车方向盘装置,包括方向盘、ecu、触觉传感器和处理电路,所述触觉传感器与所述处理电路均安装在所述方向盘上,所述方向盘、所述触觉传感器和所述处理电路分别与所述ecu电性连接,所述方向盘表面设置多个触觉传感器安装槽,所述触觉传感器固定安装在所述触觉传感器安装槽中,所述触觉传感器受压后电阻值将随着压力和温度改变,其实时的电阻值通过处理电路转化为电压信号传输到所述ecu,所述ecu根据输入的信号发出相应的指令;其中,
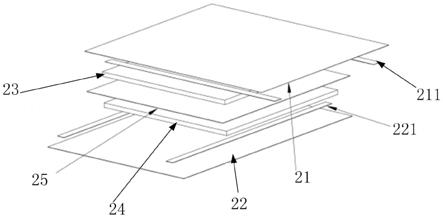
12.所述触觉传感器为柔性多模态电阻式触觉传感器,包括上基板、下基板、第一敏感层、第二敏感层和连接层,所述连接层的上下端面均与所述敏感层连接,所述上基板的下端
面上涂覆有第一电极,所述下基板的上端面上涂覆有第二电极,所述第一敏感层背离所述连接层的一面与所述上基板的下端面连接且与所述第一电极接触;所述第二敏感层背离所述连接层的一面与所述下基板的上端面连接且与所述第二电极接触。
13.进一步的,所述上基板和所述下基板为耐高温的pet胶带,所述第一电极与所述第二电极为条形导电铜漆,均涂覆在所述pet胶带有粘性的一面;所述第一电极与所述第二电极正交排列。
14.进一步的,所述第一敏感层为填充了1:1含量的碳黑(cb)和石墨烯(gp)的室温硫化硅橡胶(rtv)制成的导电橡胶,所述第二敏感层为填充了1:1含量的碳黑(cb)和碳纳米管(cnt)的室温硫化硅橡胶(rtv)制成的导电橡胶,每个敏感层均是一个传感单元,一个电阻式多模态触觉传感器包含两个传感单元,好处是测量冗余,减少误差。
15.进一步的,所述连接层为玻璃纤维双面胶带。
16.进一步的,所述处理电路固定安装在所述方向盘的下面,所述第一电极和所述第二电极分别通过两根电极导线与所述处理电路连接,所述处理电路与所述ecu电连接。
17.进一步的,所述处理电路包括arduino uno单片机、微型电源和参考电阻,所述微型电源为所述arduino uno单片机、所述参考电阻及各个所述触觉传感器供电,每个所述触觉传感器的电极导线分别连接arduinouno单片机上的与各个所述触觉传感器位置对应的信号输入端,所述arduinouno单片机的信号输出端连接所述ecu的输入端;以实现驾驶员可以自定义不同触摸位置和握力大小所产生的的功能。
18.进一步的,所述处理电路同时测试第一敏感层和第二敏感层的实时阻值,所述arduino uno单片机以分压原理将两个敏感层的阻值转化为电压信号输入所述ecu中,所述ecu根据输入的由压力和温度转化来的电压信号来发出对应指令。其中,分压电路的计算公式是:v
out
=(v
in
×
r2)/(r1 r2),v
in
是输入电压,v
out
是输出电压,设定的输入电压v
in
是5v,r1是基准电阻,根据测得的v
out
便可以算出未知的电阻r2,也就是传感器单元的当前阻值。
19.进一步的,所述电阻式多模态触觉传感器的制备方法为:
20.(1)分散:将称取的导电填料在少量无水乙醇中用玻璃棒搅拌分散使其初步分散,然后使用超声分散仪分散导电填料1h。
21.(2)混合:将rtv的基本组分和8%比重的导电填料溶液在烧杯里混合,使用电动搅拌器以300r/min搅拌30min;然后加入rtv基体质量分数5%的固化剂,再使用电动搅拌器以500r/min搅拌30min。
22.(3)除泡:使用真空泵除气泡30min。
23.(4)旋涂:通过针管取出液态混合材料,注入ps培养皿,在200r/min的速度下旋涂120s。
24.(5)固化:将旋涂成型的混合材料放入真空干燥箱,在60℃下保温24h。
25.(6)组装:把裁剪好的导电复合材料薄膜放在涂有导电铜漆的pet胶带上,加热固化;最后把就两种导电复合材料制成的传感单元以电极正交排列的方式叠放,中间用绝缘的玻璃纤维双面胶带隔开。
26.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种带有多模态触觉感知的智能汽车方向盘装置,优点在于:
27.1、本发明所述的电阻式触觉传感器柔性好,可以同时测量压力和温度,消除了传
统触觉传感器因温度变化带来误差的可能。
28.2、导电橡胶复合材料具备力敏和温敏双重特性,带有双信号通道,不需要复杂的信号处理电路,体积小,容易集成在方向盘上。
29.3、本发明所述的智能方向盘装置具有手势识别和人体温度感知能力,温度和压力同属触觉领域,温度可以辅助感知驾驶员手的位置,驾驶员可以通过手部握力大小和位置来触发汽车的各种辅助驾驶系统如:自动驾驶功能,影音娱乐功能和导航功能。
30.本发明所述的带有触觉感知的智能方向盘装置可以用于提供更有效和较少干扰的人机交互界面,从而使汽车驾驶辅助系统更加智能化,效率化和安全化。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
32.图1是本发明电阻式多模态触觉传感器的结构图。
33.图2是本发明电阻式多模态触觉传感器和处理电路的装置图。
34.图3是本发明电阻式多模态触觉传感器和处理电路的原理图。
35.图4是本发明带有电阻式多模态触觉传感器的智能车方向盘装置的总体示意图。
36.图5是本发明的控制框图。
37.其中:
[0038]1‑
方向盘;2
‑
触觉传感器;3
‑
处理电路;21
‑
上基板;22
‑
下基板;23
‑
第一敏感层;24
‑
第二敏感层;25
‑
连接层;211
‑
第一电极;221
‑
第二电极;31
‑
arduino uno单片机;32
‑
微型电源;33
‑
参考电阻。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
触觉是是一个综合性指标,包括对物体的粗糙度、硬度、温度、湿度、力等信号的综合反映。因此,柔性触觉传感器广义上也分为应力应变传感器,温度传感器,湿度传感器等。电阻式触觉传感器的特点是应用半导体作为敏感材料,其电阻阻值的变化会随着外界刺激而改变。传统的压电陶瓷式等类型的触觉力传感器存在柔性差、不易应用在人机交互界面等缺点。掺杂型柔性高分子导电复合材料,比如填充碳系填料,金属氧化物,金属纳米线,这类材料因具备加工性好、工艺简单、电阻率易于调节等优点在柔性电子的研究中得到广泛应用。
[0041]
本发明实施例公开了一种带有多模态触觉感知的智能汽车方向盘装置,如图1所示,包括方向盘1、ecu、触觉传感器2和处理电路3,触觉传感器2与处理电路3均安装在方向盘1上,方向盘1、触觉传感器2和处理电路3分别与ecu电性连接,方向盘1表面设置多个触觉
传感器安装槽,触觉传感器2固定安装在触觉传感器安装槽中,触觉传感器2受压后电阻值将随着压力和温度改变,其实时的电阻值通过处理电路3转化为电压信号传输到ecu,ecu根据输入的信号发出相应的指令;其中,
[0042]
触觉传感器2为柔性多模态电阻式触觉传感器,包括上基板21、下基板22、第一敏感层23、第二敏感层24和连接层25,连接层25为高强度柔性好的玻璃纤维双面胶带,连接层25的上下端面分别与第一敏感层23、第二敏感层24连接,上基板21的下端面上涂覆有第一电极211,下基板22的上端面上涂覆有第二电极221,第一敏感层23背离连接层25的一面与上基板21的下端面连接且与第一电极211接触;第二敏感层24背离连接层25的一面与下基板22的上端面连接且与第二电极221接触。
[0043]
具体的,上基板21和下基板22为耐高温的pet胶带,第一电极211与第二电极221为条形导电铜漆,均涂覆在pet胶带有粘性的一面,第一电极211与第二电极221正交排列。
[0044]
有利的,第一敏感层23为填充了1:1含量的碳黑cb和石墨烯gp的室温硫化硅橡胶rtv制成的导电橡胶,第二敏感层24为填充了1:1含量的碳黑cb和碳纳米管cnt的室温硫化硅橡胶rtv制成的导电橡胶,每个敏感层均是一个传感单元,一个电阻式多模态触觉传感器包含两个传感单元,好处是测量冗余,减少误差。
[0045]
本发明采用价格便宜的碳黑(cb)为主要导电填料,以碳纳米管(cnt)和石墨烯(gp)辅助调节导电橡胶材料的温敏和力敏特性;由于温敏特性是导电聚合物的固有特性,会对压力的测试产生不利影响,只在rtv中掺杂cb的导电橡胶材料的力敏特性和温敏特性为中等,实验结果表明掺杂和cb比重为1:1的cnt或者gp后,含有cb/cnt杂化填料的导电橡胶材料的温敏特性变差,力敏特性变好;含有cb/gp杂化填料的导电橡胶材料的温敏特性变好,力敏特性也变好。因此将多模态电阻式触觉传感的两个敏感层分别采取cb/gp杂化填料和cb/cnt杂化填料填充,以形成压力和温度两个信号的冗余测试。由于两个敏感材料的敏感特性不同,因此通过两个敏感层形成的传感单元的电信号便可解读外界的压力和温度。实验结果表明在0
‑
100n的压力区间上,传感器信号曲线线性度良好,在25
‑
90℃的温度区间上,温敏特性灵敏度约是铂测温电阻的5
‑
10倍。此外,由于填料的含量和类别配比会影响敏感材料的传感器特性,可以简单的调节制备过程来改变传感器的传感特性来适应特定应用环境,以减少误差。
[0046]
如图2
‑
3所示,处理电路3包括arduino uno单片机31、微型电源32和参考电阻33,在实验过程采用面包板34,将电子元器件根据需要随意插入或拔出,免去了焊接,节省电路的组装时间,微型电源32为arduino uno单片机31、参考电阻33及各个触觉传感器2供电,每个触觉传感器2的电极导线分别连接arduinouno单片机31上的与各个触觉传感器2位置对应的信号输入端,arduinouno单片机31的多个信号输出端连接ecu的输入端,通过编程可以定义对不同触摸位置的功能设置;因每个触觉传感器2对应单片机上不同的信号输入端,使得在触摸方向盘1不同位置的触觉传感器2后,不仅能设定握力大小所产生的功能,arduino uno单片机31在接收受压后的电阻值后,也能感知触觉传感器2所在位置,通过将该位置信息与转化后的电压信号结合,输入ecu,执行所对应的功能。
[0047]
如图4所示,处理电路3整体放置在盒体中,并固定安装在方向盘1的下面,第一电极211和第二电极221分别通过两根电极导线与处理电路3连接,处理电路3与ecu电连接。利用自行搭建的处理电路3同时测试第一敏感层23和第二敏感层24的实时阻值,arduino uno
单片机31以分压原理将两个敏感层的阻值转化为电压信号输入ecu中,ecu根据输入的由压力和温度转化来的电压信号来发出对应指令;本发明中的电阻测试程序,使用了arduino ide多线程库scoop,建立两个子线程算法来完成两个阻值的同时测试。
[0048]
其中,分压电路的计算公式是:v
out
=(v
in
×
r2)/(r1 r2),v
in
是输入电压,v
out
是输出电压,设定的输入电压v
in
是5v,r1是基准电阻,根据测得的v
out
便可以算出未知的电阻r2,也就是传感器单元的当前阻值。
[0049]
本发明一种电阻式多模态触觉传感器的制备方法为:
[0050]
(1)分散:将称取的导电填料在少量无水乙醇中用玻璃棒搅拌分散使其初步分散,然后使用超声分散仪分散导电填料1h。
[0051]
(2)混合:将rtv的基本组分和8%比重的导电填料溶液在烧杯里混合,使用电动搅拌器以300r/min搅拌30min;然后加入rtv基体质量分数5%的固化剂,再使用电动搅拌器以500r/min搅拌30min。
[0052]
(3)除泡:使用真空泵除气泡30min。
[0053]
(4)旋涂:通过针管取出液态混合材料,注入ps培养皿,在200r/min的速度下旋涂120s。
[0054]
(5)固化:将旋涂成型的混合材料放入真空干燥箱,在60℃下保温24h。
[0055]
(6)组装:把裁剪好的导电复合材料薄膜放在涂有导电铜漆的pet胶带上,加热固化;最后把就两种导电复合材料制成的传感单元以电极正交排列的方式叠放,中间用绝缘的玻璃纤维双面胶带隔开。
[0056]
如图4所示,将本发明电阻式多模态触觉传感器左右分别3个布置在方向盘的表面,将处理电路布置在方向盘下面,柔性多模态触觉传感器与处理电路通过电气连接,处理电路与汽车ecu之间也是电气连接的。因此,在这个以触觉为信号输入的人机交互系统里,驾驶员不必把视线从道路上移开,也不必把手移开方向盘便可利用触觉传感器输入指令,汽车ecu将根据触觉信号来启动或者关闭车载的何种辅助驾驶或者信息娱乐功能。
[0057]
由于每个触觉传感器2的分别对应连接arduinouno单片机31的不同的信号输入端,驾驶员可以自定义不同触摸位置和握力大小所产生的的功能,比如左侧或者右侧按压一个传感器,按压其中的二个或者三个,或者左右侧一起按压其中四个,五个或者六个传感器。由于感知阵列中感知像素点的位置是固定的,因此顺时针依次按压,逆时针依次按压或者其他特定顺序按压传感器也可以作为指令输入。此外,由于传感器的电信号随外界刺激单调变化,驾驶员可以使用不同的握力来触发不同的功能。尽管只有6个传感器触点,却能获得大量的指令输入,从而可以更简单的利用车载的各种辅助驾驶和信息娱乐功能。此外由于本发明的多模态电阻式触觉传感器还可以感知温度,且灵敏度高,因此温度不会造成压力测量的误差,也能更清楚感知驾驶员的手是否在方向盘上。当感知到人手脱离方向盘时,自动驾驶系统立刻接管车辆,当感知到驾驶员手回到方向盘时,自动驾驶系统立刻移交车辆控制权给驾驶员。智能汽车不仅可以完全自动化驾驶,也可以手动控制,还可以在不同级别的协助和自动化上与驾驶员一起工作,以实现有益的协同控制车辆。
[0058]
自动驾驶是汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,属现有技术,本发明中ecu接收汽车的电阻式多模态触觉传感器、车速传感器、摄像头、雷达传感器的信号,进行算法分析处理,实现路感模拟;将车辆规划路径分析结果发送到多
媒体显示屏、组合仪表,并进行提示;车速传感器、摄像头、雷达传感器接收车辆外部信息和路况信息,电阻式多模态触觉传感器接收驾驶员的触觉信号,进行综合计算处理,分辨驾驶者驾驶状态,规划驾驶车辆的行进路径。
[0059]
本发明将触觉、听觉和视觉三种信息计算处理后的信号传递给驾驶员,能够为驾驶员提供更有效和较少干扰的辅助驾驶体系,在提高交通安全性有重要意义,解决了目前以听觉、视觉为人机交互手段造成的交互效率低,智能化程度不足,辅助安全驾驶能力低的缺点,使人机交互和辅助安全驾驶兼顾智能化,效率化和安全化。
[0060]
本发明提出一种带有多模态触觉感知的方向盘装置,使用触觉的方式以减少驾驶员的认知负荷,从而更安全和高效的进行人机交互,以便于更好利用车载辅助驾驶和信息娱乐功能。其控制框图如图5所示,包括6个位置的柔性电阻式多模态触觉传感器、中央控制单元以及各种车载辅助系统。中央控制单元中预设了各种指令对应的车载功能,从而达到使智能车辆人机交互界面智能化,效率化和安全化的效果。
[0061]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0062]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

