1.本发明涉及移动体。更详细而言,涉及沿着移动面移动的移动体。
背景技术:
2.在专利文献1中公开了按照路径数据在行驶区域内移动的无人输送车(移动体)。该无人输送车装载货物并移动、或者卸载货物。另外,该无人输送车具有在行驶中检测到前方的障碍物时躲避该障碍物而行驶的功能。
3.然而,在将行驶所需的马达、升降所需的马达、以及电池放入框体内的移动体中,不存在抑制了与行驶面正交的方向的尺寸的行驶体。
4.现有技术文献
5.专利文献
6.专利文献1:日本国公开专利公报2012
‑
053838号
技术实现要素:
7.发明要解决的课题
8.本发明的目的在于提供能够抑制框体在与行驶面正交的方向上的尺寸的移动体。
9.本发明的一方案的移动体具备框体、移动用马达、以及电池。移动用马达使框体沿着移动面移动。电池向移动用马达供给电力。在移动体中,移动用马达及电池在沿与移动面正交的方向观察时配置在不同的位置。
附图说明
10.图1是本发明的一实施方式的移动体的立体图。
11.图2是上述移动体和输送物的立体图。
12.图3是上述移动体的驱动轮单元的立体图。
13.图4是上述移动体的辅助轮单元的剖视图。
14.图5是上述辅助轮单元的分解立体图。
15.图6是上述移动体的升降机构的概要俯视图。
16.图7是上述移动体的支承单元的立体图。
17.图8是上述支承单元的剖视图。
18.图9是上述支承单元的支承部向上方向移动了的状态的剖视图。
19.图10是上述支承部的可动部的放大剖视图。
20.图11是上述移动体的前部的放大立体图。
21.图12是上述移动体的后部的放大立体图。
22.图13是上述移动体的框图。
23.图14是上述移动体的分解立体图。
24.图15是上述移动体的仰视图。
25.图16是上述移动体的侧视图。
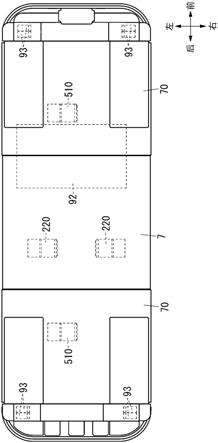
26.图17是上述移动体的俯视图。
27.图18是上述移动体的侧视图。
28.图19是上述移动体的俯视图。
29.图20是上述移动体的框体的内部的要部剖视图。
30.图21是上述移动体的吸气口的附近的剖视图。
31.图22是上述移动体的后部的侧视图。
具体实施方式
32.(1)实施方式
33.(1.1)概要
34.本实施方式的移动体1a沿着移动面100移动(参照图2)。如图17所示,移动体1a具备移动用马达220、电池92、以及框体7。
35.移动面100是供移动体1a在其上移动的面。移动面100是地板面、垫的上表面、地面、沥青的上表面、混凝土的上表面等。移动面100也可以是室内和室外中的任一场所。作为场所,例如可以举出仓库、工厂、建筑场地、店铺(包括购物商场)、物流中心、事务所、公园、住宅、学校、医院、车站、机场、停车场、交通工具的内部等。交通工具的内部可以例示船舶、电车、飞机等的内部。移动面100可以不水平,也可以具有凹凸。
36.移动用马达220使框体7沿着移动面100移动。移动用马达220既可以是多个,也可以是单个。移动用马达220例如既可以是对在移动面100上支承框体7的车轮进行驱动的马达,也可以是对齿条
‑
小齿轮中的小齿轮进行驱动的马达、在牵引金属丝时际对金属丝进行卷绕的马达等。移动用马达220作为驱动这些马达的驱动源22使用。
37.电池92向移动用马达220及升降用马达510供给电力。移动用马达220及电池92在沿与移动面100正交的方向观察时配置在不同的位置。这里所说的“配置在不同的位置”是指,各要素在沿与移动面100正交的方向观察时未重合,各要素之间的距离没有特别限定。例如,对于两个要素仅以相邻方式接触而在沿与移动面100正交的方向观察时未重合的情况,包含在“配置在不同的位置”中。
38.因此,根据本实施方式的移动体1a,在与行驶面(移动面100)正交的方向上,移动用马达220与电池92未重叠,因此能够将框体7在与行驶面(移动面100)正交的方向上的尺寸抑制得尽量小。
39.(1.2)详细
40.(1.2.1)整体结构
41.以下,对本实施方式的移动体1a进行详细说明。以下,只要没有特别指出,移动面100作为水平面进行说明,但移动面100也可以不是水平面。另外,有时将与移动面100正交的相互反向的两个方向一并定义为“上下方向”,将移动体1a前进时移动体1a前进的方向设为“前方向”,将其相反方向设为“后方向”,并将前方向及后方向一并称为“前后方向”。另外,将与上下方向及前后方向这两个方向正交的相互反向的两个方向定义为“左右方向”。但是,这些方向的定义并不意味着限定移动体1a的使用方案。另外,附图中的表示各方向的箭头只不过是为了说明而标记的,并不伴随有实体。
42.移动体1a是沿着移动面100移动的装置。在本实施方式中,作为移动体1a,以利用多个车轮10在移动面100上移动的方案为一例进行说明。但是,如在“(2)变形例”中叙述的那样,作为移动体1a,不限于利用多个车轮10移动的方案。
43.如图1及图2所示,移动体1a通过与移动面100接触的车轮10绕与移动面100平行的旋转轴r1旋转,从而沿着移动面100移动。在本实施方式中,移动体1a在载置有输送物x1的状态下移动至作为目的的场所。总之,本实施方式的移动体1a是使输送物x1移动的输送装置1。以下,对作为移动体1a的一例的输送装置1进行详细说明。
44.在本实施方式中,输送装置1在规定区域内接收控制信号,并接受基于该控制信号的指示,而执行将输送物x1进行输送这样的作业。本发明所说的“规定区域”,作为一例,是仓库、工厂、建筑场地、店铺(包括购物商场)、物流中心、事务所、公园、住宅、学校、医院、车站、机场、停车场等。而且,“规定区域”例如也可以是船舶、电车或飞机等交通工具的内部。在本实施方式中,规定区域是物流仓库。
45.输送物x1是成为被输送的对象的物品。作为输送物x1,可以例示货物、制造工厂中的产品、制造中途的产品(半成品)、载置有货物的托盘等。在本实施方式中,如图2所示,输送物x1是载置有货物的滚轮箱式托盘。在本发明中,对于输送物x1,有时称为“载置物”。
46.本实施方式的输送装置1具备载置有输送物x1的升降部70。升降部70相对于移动面100上升或下降。输送装置1以进入输送物x1的下方的方式移动,并使升降部70上升而将输送物x1载置于升降部70。输送装置1在该状态下移动到目的地并使升降部70下降。由此,本实施方式的输送装置1对输送物x1进行输送。对于升降部70,在“(1.2.4)升降机构”中进行详述。
47.如图1所示,输送装置1具备包括升降部70在内的框体7、控制部9(参照图13)、多个(在此为两个)驱动轮单元2、多个(在此为两个)辅助轮单元3、以及多个(在此为两个)升降机构5(参照图6)。另外,输送装置1还具备检测部91(参照图13)和电池92(参照图17)。
48.(1.2.2)驱动轮单元
49.驱动轮单元2使输送装置1沿着移动面100移动。在本实施方式中,驱动轮单元2如图1所示,配置于前后方向的中央部。这里所说的“中央部”是指具有以输送装置1的前后方向的全长的1/3的长度从输送装置1的前后方向的中心起在前后方向上均等地分配而成的一个范围的部分。但是,驱动轮单元2的配置位置没有特别限制。如图3所示,两个驱动轮单元2在输送装置1的前后方向的中央部处以相互呈左右对称的方式配置。
50.各驱动轮单元2具备基台21、驱动源22、驱动带轮23及从动带轮24、动力传递体25、轴26、轴承单元27、以及车轮10。由驱动源22产生的动力依次向驱动带轮23、动力传递体25、从动带轮24、轴26及车轮10传递。车轮10在移动面100上对框体7进行支承,但对于这里所说的车轮10,有时在本发明中说的是“驱动轮28”。本发明中所说的“驱动轮28”是直接或间接地从驱动源22接受动力而进行工作的车轮10。在此,两个驱动轮单元2是相互相同的结构,因此标注同一附图标记并适当省略重复说明。
51.基台21相对于框体7被固定。在本实施方式中,基台21由以上下方向为宽度方向且以前后方向为长度方向的矩形状的板材构成。在基台21安装有驱动源22、驱动带轮23、从动带轮24、以及轴承单元27的一部分。
52.驱动源22是动力的产生源,对驱动轮28进行驱动。在本实施方式中,驱动源22是移
动用马达220。本实施方式的移动用马达220是电动马达。但是,作为驱动源22,也可以是液压马达、气动马达等。移动用马达220的输出轴(未图示)沿着左右方向延伸,特别是,输出轴的前端朝向左右方向中的中央侧。驱动带轮23与移动用马达220的输出轴的前端部相连。
53.驱动带轮23及从动带轮24相对于基台21以能够绕与左右方向平行的轴旋转的方式安装。驱动带轮23与从动带轮24以在前后方向上隔开间隔的方式分离。驱动带轮23从移动用马达220接受动力而绕移动用马达220的输出轴的旋转轴旋转。驱动带轮23与从动带轮24经由动力传递体25以能够传递动力的方式相连。
54.动力传递体25从驱动带轮23对从动带轮24传递动力。动力传递体25在本实施方式中是环状的带。但是,动力传递体25也可以是链、金属丝、绳、轴、齿轮等。
55.从动带轮24是经由动力传递体25而被传递来自驱动带轮23的动力的带轮。在本实施方式中,从动带轮24的外径比驱动带轮23的外径大。但是,从动带轮24的外径也可以是驱动带轮23的外径以下。轴26与从动带轮24以成为同心的方式相连。
56.轴26将驱动轮28与从动带轮24相连。轴26被轴承单元27支承为能够绕沿左右方向延伸的旋转轴r1旋转。总之,轴26使驱动轮28绕旋转轴r1旋转。
57.驱动轮28通过从驱动源22传递来的动力旋转。驱动轮28与轴26的长度方向的端部相连。在本实施方式中,驱动轮28具备与轴26相连的轮281、以及轮胎282。
58.在本实施方式中,轮胎282由内衬于轮281周围的树脂构成。但是,轮胎282也可以是橡胶轮胎,在该情况下,轮胎282也可以是实心或中空。另外,驱动轮28也可以不具备轮281,也可以是整体由树脂等形成的车轮。另外,驱动轮28也可以具备循环轨道(履带)。
59.在本实施方式的驱动轮单元2中,由移动用马达220产生的动力依次向驱动带轮23、动力传递体25、从动带轮24及轴26传递,并对驱动轮28进行驱动。总之,驱动轮28通过移动用马达220而间接地接受动力。但是,也可以相对于移动用马达220的输出轴直接地连结驱动轮28、或者使用轮内马达等而直接对驱动轮28施予驱动力。
60.然而,各驱动轮单元2的移动用马达220能够将输出轴的旋转方向在正转方向和反转方向之间适当地进行切换。这里所说的“正转方向”是指输送装置1向前方向移动时的输出轴的旋转方向,“反转方向”是指输送装置1向后方向移动时的输出轴的旋转方向。
61.在本实施方式中,在两个驱动轮单元2中,一个驱动轮单元2的移动用马达220相对于另一个驱动轮单元2的移动用马达220独立工作。总之,各驱动轮单元2是独立的。因此,在本实施方式的输送装置1中,两个驱动轮28通过以相互不同的角速度旋转而能够沿左右方向中的任一方向回转,并通过以相互相同的角速度旋转而能够直线地行驶。因此,本实施方式的输送装置1能够进行向前进、后退、左右方向的回转(包括平转及原地回转)。
62.在本实施方式中,输送装置1的后退速度比前进速度慢。但是,输送装置1的前进和后退也可以是相同的速度。
63.两个驱动轮单元2在框体7的前后方向的中央部以在左右方向上分离的方式配置。特别是,在本实施方式中,如上述那样,两个驱动轮单元2配置成左右对称,驱动轮28的左右方向的外侧的端面位于比框体7的左右方向的外侧的端面靠内侧的位置。即,两个驱动轮28在俯视时收纳于框体7。
64.在此,如图1所示,两个辅助轮单元3以在前后方向上分离的方式配置,驱动轮单元2配置在两个辅助轮单元3之间。各辅助轮单元3如在后述的“(1.2.3)辅助轮单元”中说明的
那样具有至少一个辅助轮45。总之,至少一个驱动轮28配置在多个辅助轮45之间。
65.在本实施方式中,两个驱动轮单元2在前后方向上配置在相同的位置,但也可以在前后方向上配置在错开的位置。另外,输送装置1也可以作为仅具备一个驱动轮单元2的输送装置1。在该情况下,驱动轮28也可以形成为左右方向的大致全长的范围内的宽度,也可以配置在左右方向的中央。即使在该情况下,也优选为,至少一个驱动轮单元2配置在两个辅助轮单元3之间。
66.(1.2.3)辅助轮单元
67.辅助轮单元3是包含对基于驱动轮28的移动进行辅助的车轮10(参照图4)在内的单元。在本实施方式中,如图1所示,多个辅助轮单元3中的一个配置在比多个驱动轮单元2靠前方的位置,而另一个配置在比多个驱动轮单元2靠后方的位置。以下,将配置在比多个驱动轮单元2靠前方的位置的辅助轮单元3设为“第一辅助轮单元3a”,将配置在比多个驱动轮单元2靠后方的位置的辅助轮单元3设为“第二辅助轮单元3b”。
68.在本实施方式中,第一辅助轮单元3a在框体7的底板74的前部处配置在左右方向的中央。这里所说的“前部”是指在框体7中具有比前后方向的中央部靠前方的一个范围的部分。在此,在图4中示出第一辅助轮单元3a的铅垂面处的剖视图。第一辅助轮单元3a具备壳体31、辅助轮支承部34、缓冲机构39、以及车轮10。
69.壳体31是第一辅助轮单元3a中安装于框体7的部分。如图5所示,壳体31具备壳体主体32和凸缘片33。壳体主体32具备多个侧板321和上板322,且形成为向下方具有开口面的长方体状。凸缘片33形成于壳体主体32的开口面的外侧。在此,如图4所示,在框体7的底板74形成有用于安装第一辅助轮单元3a的开口部746。当将第一辅助轮单元3a安装于底板74时,壳体主体32穿过该开口部746而收纳于框体7的内部,凸缘片33沿着框体7的底板74的下表面配置。凸缘片33被螺纹固定于底板74。
70.车轮10在移动面100上对框体7进行支承,但对于这里所说的车轮10,有时在本发明中说的是“辅助轮45”。本发明中所说的“辅助轮45”是未从驱动源22接受动力的车轮10,且随着由多个驱动轮28实现的框体7的移动而转动。如图5所示,辅助轮45具备多个辊451和多个轴承452。
71.各辊451形成为中心轴成为旋转轴的圆筒状。作为一例,各辊451为树脂制。但是,辊451也可以由例如橡胶、高弹体、聚氨酯、尼龙、苯酚、聚碳酸酯等构成。另外,优选辊451的颜色是与移动面100的颜色同色系的颜色。多个辊451沿着旋转轴相邻。
72.多个轴承452以同心状嵌入多个辊451的中央部。轴承452配置在辅助轮支承部34所包含的安装轴35与多个辊451之间。轴承452由球轴承、滚子轴承等构成。
73.辅助轮支承部34将辅助轮45支承为能够绕与移动面100平行的旋转轴旋转。而且,辅助轮支承部34相对于缓冲机构39所包含的可动框架40,被支承为能够绕沿上下方向延伸的轴旋转。辅助轮支承部34具备安装轴35、支承部主体36、防脱构件37、以及限位件38。
74.安装轴35将辅助轮45支承为能够绕旋转轴旋转。安装轴35沿着移动面100在一个方向上延伸。具体而言,安装轴35插入至轴承452的内圈的中央。安装轴35由支承部主体36支承。
75.支承部主体36是供安装轴35安装的构件。在本实施方式中,支承部主体36具备一对槽361和上碰触面362。各槽361向下方向开口,并供安装轴35的端部穿过开口而嵌入。在
此,防脱构件37以在一对槽361嵌入有安装轴35的对应的端部的状态安装于支承部主体36。防脱构件37限制处于与一对槽361对应的端部被嵌入的状态下的安装轴35向下方向移动。
76.上碰触面362是朝向上方向的面,且与缓冲机构39的轴承体42的下表面碰触。当从辅助轮45对支承部主体36施予上方向的力时,支承部主体36将该力通过上碰触面362向轴承体42传递。
77.限位件38被缓冲机构39所包含的轴承体42支承为能够绕沿上下方向的旋转轴r2旋转。另外,限位件38相对于支承部主体36被固定。由于轴承体42如后述那样安装于缓冲机构39所包含的可动框架40,因此限位件38相对于可动框架40被支承为能够绕旋转轴r2旋转。
78.限位件38具备穿过轴承体42的中心的轴部381、以及从轴部381的上端部向径向方向突出的凸缘部382。凸缘部382载置于轴承体42的上表面。在轴部381的下端安装有支承部主体36。
79.缓冲机构39是缓和从辅助轮45输入的冲击的机构。在本实施方式的输送装置1中,辅助轮单元3具备缓冲机构39,而另一方面,驱动轮单元2不具备缓冲机构39。总之,在本实施方式的输送装置1中未设置有缓和从驱动轮28输入的冲击的缓冲机构39。因此,能够尽量简化容易变成复杂机构的驱动轮单元2的结构,而另一方面,通过在辅助轮单元3设置缓冲机构39,作为输送装置1,能够实现的上下方向的小型化并且能够实现顺畅的移动。
80.缓冲机构39具备可动框架40、多个滑动体41、轴承体42、压板43、以及多个缓冲弹簧44。
81.可动框架40以相对于壳体31能够在上下方向上移动的方式安装。可动框架40与壳体31之间的安装既可以仅是嵌入,也可以是以能够移动的方式被螺纹固定。可动框架40具备贯通孔401和多个弹簧安装部402。贯通孔401对轴承体42进行收纳,并且穿过限位件38的轴部381。贯通孔401在从上方观察时(以下为俯视)为圆形状,并形成于可动框架40的中央。多个弹簧安装部402是用于安装多个缓冲弹簧44的部分。在本实施方式中,各弹簧安装部402具备与缓冲弹簧44的下端碰触的弹簧碰触面403、供固定销441穿过的通过孔404。通过孔404既可以将可动框架40沿上下方向贯通,也可以不贯通。
82.滑动体41配置在可动框架40的外侧面与壳体31的内侧面之间,并减少在可动框架40向上下方向移动时能够产生的摩擦。滑动体41在本实施方式中形成为板状。滑动体41的主面为铅垂面,且与壳体31的内侧面对置。滑动体41在本实施方式中安装于可动框架40。滑动体41的摩擦系数比可动框架40的摩擦系数小。滑动体41例如由氟树脂、尼龙、四氟化乙烯树脂等构成。但是,滑动体41也可以在壳体31的内侧面的整个面的范围内安装,壳体31的侧板321也可以由滑动体41的摩擦系数以下的材料形成。
83.轴承体42将限位件38支承为能够绕旋转轴r2旋转,也就是,轴承体42对辅助轮支承部34进行支承。轴承体42嵌入可动框架40的贯通孔401,由此安装于可动框架40。轴承体42例如由滚动轴承(球轴承、滚子轴承等)、滑动轴承、流体轴承等构成。
84.压板43限制轴承体42向上方向的移动。压板43在嵌入到可动框架40的贯通孔401的轴承体42的上方,相对于可动框架40被固定。由此,从辅助轮45输入的上方向的力即使经由辅助轮支承部34而施加于轴承体42,也能够由压板43承受。当由压板43承受该力时,可动框架40相对于壳体31向上方向移动。
85.多个缓冲弹簧44配置在可动框架40的上表面与壳体31的上板322的下表面之间。各缓冲弹簧44能够在上下方向上产生弹性变形。因此,当可动框架40相对于壳体31向上方向移动时,多个缓冲弹簧44在上下方向上产生弹性变形,而能够吸收冲击。
86.在本实施方式中,各缓冲弹簧44是具有相对于上下方向平行的中心轴的螺旋弹簧。但是,缓冲弹簧44不限于螺旋弹簧,具有弹性即可。缓冲弹簧44例如也可以是板簧(包括薄板簧)、碟形弹簧、橡胶弹簧、空气弹簧、防振橡胶、缓冲橡胶等。
87.在本实施方式中,多个缓冲弹簧44安装于在可动框架40的四角形成的弹簧安装部402。由此,当可动框架40相对于壳体31向上方向移动时,多个缓冲弹簧44大致均等地挠曲。由此,可动框架40能够沿着上下方向平行移动。
88.在本实施方式中,多个缓冲弹簧44的总挠度全部相同。本发明中所说的“总挠度”是指从未施加载荷的高度(自由高度)中减去施加载荷而以最大限度压缩后的高度(密接高度)所得到的挠度。在本实施方式中,第一辅助轮单元3a的缓冲弹簧44的总挠度为约3mm。
89.如图1所示,第二辅助轮单元3b在框体7的底板74的后部配置在左右方向的中央。这里所说的“后部”是指在框体7中具有比前后方向的中央部靠后方的一个范围的部分。第二辅助轮单元3b是与第一辅助轮单元3a相同的结构。
90.但是,第二辅助轮单元3b的缓冲弹簧44的总挠度与第一辅助轮单元3a的缓冲弹簧44不同。在本实施方式中,第二辅助轮单元3b的缓冲弹簧44的总挠度为约8mm。即,如上述那样,由于第一辅助轮单元3a的缓冲弹簧44的总挠度为约3mm,因此第二辅助轮单元3b的缓冲弹簧44的总挠度比第一辅助轮单元3a的缓冲弹簧44大。由此,可以减小框体7的与第一辅助轮单元3a对应的部分(在本实施方式中为框体7的前部)向下方向能够移动的量。由此,在将输送物x1载置于与第一辅助轮单元3a对应的位置时,能够抑制输送装置1的前部的下沉量。其结果是,例如当在输送装置1的前部存在激光传感器的情况下等,能够抑制由于输送装置1的前部过度下沉而造成传感器对行驶面(移动面100)进行误检测的情况。
91.(1.2.4)升降机构
92.(1.2.4.1)整体的构成
93.如图1所示,本实施方式的输送装置1具备相对于移动面100能够独立升降的多个升降部70。升降部70是供输送物x1(载置物)载置的部分,在本实施方式中是框体7的一部分。如图2所示,本实施方式的输送装置1移动到位于载置有货物的滚轮箱式托盘(输送物x1)的下方的间隙中,之后多个升降部70中的至少一方上升而抬起输送物x1。然后,输送装置1在抬起了输送物x1的状态下移动。但是,输送装置1移动到输送物x1的下方,并且升降部70上升而装载输送物x1的动作只不过是动作例的一例。在本发明的输送装置1中,也可以是,例如升降部70不上升而由作业者将输送物x1相对于升降部70进行载置,并且输送装置1在该状态下进行移动。
94.在本实施方式中,输送装置1具备使多个升降部70上升的多个升降机构5(参照图6)。
95.升降机构5是使载置输送物x1的升降部70升降的机构。本实施方式的输送装置1具备多个(在此为两个)升降机构5。多个升降机构5与多个升降部70是一对一的关系。多个升降机构5中的一个升降机构5配置于框体7的前部,其他升降机构5配置于框体7的后部。配置于前部的升降机构5和配置于后部的升降机构5是相同的机构。在此,主要对配置于前部的
升降机构5进行说明。
96.在图6中示出配置于前部的升降机构5的概要图。各升降机构5具备一个驱动源51、驱动轴52、多个(在此为两个)支承单元53、以及载置传感器95(参照图13)。
97.(1.2.4.2)驱动源
98.驱动源51是动力的产生源,并对支承单元53进行驱动。升降部70根据支承单元53的动作而移动,驱动源51驱动升降部70。在本实施方式中,驱动源51是升降用马达510。本实施方式的升降用马达510是电动机。但是,驱动源51也可以是液压马达、气动马达等。从升降用马达510的输出轴输出的动力向驱动轴52传递,而使驱动轴52绕旋转轴r3旋转。在本实施方式中,在升降用马达510的输出轴固定有驱动齿轮511。
99.(1.2.4.3)驱动轴
100.驱动轴52将从升降用马达510输入的动力分配至相互分离的多个部位,并向多个支承单元53传递。在驱动轴52的一部分固定有与驱动齿轮511啮合的从动齿轮521。当升降用马达510旋转时,其动力经由驱动齿轮511和从动齿轮521向驱动轴52传递。这样一来,驱动轴52绕旋转轴r3旋转。驱动轴52的两端与支承单元53连结。由此,能够将从升降用马达510输出的动力向相互分离的多个支承单元53传递。
101.(1.2.4.4)支承单元
102.各支承单元53是用于使升降部70升降的单元。在本实施方式中,多个支承单元53联动地工作。因此,多个支承单元53的上升动作和下降动作同步。在此,在图7中示出一个支承单元53的立体图。支承单元53具备设置台54、齿轮箱55、支承部56、以及引导部61。
103.(1.2.4.4.1)设置台
104.设置台54在安装有齿轮箱55、支承部56及引导部61的状态下相对于框体7被固定。在本实施方式中,设置台54具备与移动面100大致平行的第一板541、以及安装于第一板541的第二板542。第二板542相对于第一板541立起。
105.(1.2.4.4.2)齿轮箱
106.齿轮箱55与驱动轴52相连,并被输入驱动轴52的绕旋转轴r3的动力。齿轮箱55包括多个齿轮,并将所输入的动力作为绕如图8所示那样沿上下方向延伸的旋转轴r4的动力进行输出。齿轮箱55的输出轴向第一板541的下方突出。在齿轮箱55的输出轴固定有能够绕旋转轴r4旋转的第一齿轮551。
107.在本实施方式的齿轮箱55中,被输入的动力的旋转轴与输出的动力的旋转轴相互正交。但是,被输入的动力的旋转轴与输出的动力的旋转轴所成的角度不限于正交的情况,既可以大于0
°
且小于90
°
,也可以大于90
°
。总之,被输入的动力的旋转轴与输出的动力的旋转轴所成的角度交叉即可。另外,齿轮箱55也可以具有将所输入的旋转速度以不同的旋转速度进行输出的减速功能。
108.第一齿轮551与支承部56所包含的第二齿轮57啮合,而使第二齿轮57绕沿着上下方向的旋转轴r5旋转。
109.(1.2.4.4.3)支承部
110.支承部56是通过从升降用马达510输出的动力,而沿着上下方向移动的部分。在本实施方式中,通过支承部56向上方向移动而使得升降部70上升,通过支承部56向下方向移动而使得升降部70下降。总之,支承部56对多个升降部70中的一个升降部70进行支承,并使
该升降部70沿着升降方向移动。这里所说的“沿着上下方向移动”是指支承部56的至少一部分沿着上下方向移动,也包括以一部分变形的方式移动的情况、整体移动的情况。对于“向上方向移动”以及“向下方向移动”也同样。
111.支承部56具备第二齿轮57、旋转筒58、移动件59、以及伸缩盖60。
112.第二齿轮57与第一齿轮551啮合,并伴随于第一齿轮551的旋转而绕旋转轴r5旋转。在本实施方式中,第二齿轮57相对于第一板541的下表面以能够绕旋转轴r5旋转的方式安装。在第二齿轮57的中央形成有沿上下方向贯通的通孔。移动件59的一部分穿过通孔。
113.旋转筒58固定于第二齿轮57,并伴随于旋转筒58的旋转而绕旋转轴r5旋转。旋转筒58相对于第二齿轮57安装成同心状。在本实施方式中,旋转筒58与第二齿轮57之间的安装为螺纹固定,但除此之外,例如也可以由焊接、钉扎、嵌合等来实现。另外,旋转筒58和第二齿轮57也可以通过铸造、压铸等而形成为一体。
114.旋转筒58形成为圆筒状。在旋转筒58的内周面形成有第一卡合部581。第一卡合部581是与移动件59卡合的部分。这里所说的“卡合”是指,对移动件59施予来自旋转筒58的动力而以能够使移动件59沿着上下方向移动的程度进行卡合。在本实施方式中,第一卡合部581由内螺纹来实现。在本实施方式中,内螺纹是梯形螺纹,但除此之外,例如也可以是方螺纹、三角螺纹、圆螺纹等。
115.移动件59伴随于旋转筒58的旋转而沿着上下方向移动。移动件59在与旋转筒58的第一卡合部581卡合的状态下配置于旋转筒58的内侧。移动件59的上端相对于升降部70被固定(具体而言,安装于支承板75),移动件59尽管伴随于旋转筒58的旋转而沿着上下方向移动,但不绕旋转轴r5旋转。在本实施方式中,移动件59具备轴主体591、可动部593、以及弹性体597。
116.轴主体591一边相对于第一卡合部581进行卡合,一边沿着上下方向移动。轴主体591沿着上下方向延伸。轴主体591具有相对于第一卡合部581进行卡合的第二卡合部592。第二卡合部592形成于轴主体591的下端部的外周面。
117.第二卡合部592是相对于第一卡合部581进行卡合的部分。第二卡合部592伴随于旋转筒58的绕旋转轴r5的旋转,而沿着旋转轴r5(沿着上下方)移动。第二卡合部592在本实施方式中为外螺纹。外螺纹与第一卡合部581的内螺纹对应。本实施方式的外螺纹是梯形螺纹。但是,在第一卡合部581的内螺纹是方螺纹、三角螺纹或圆螺纹的情况下,第二卡合部592是与其对应的螺纹。
118.然而,由于只要一边使第一卡合部581和第二卡合部592相互卡合,一边使轴主体591沿着上下方向移动即可,因此对于具体的结构,不限于内螺纹及外螺纹。对于第一卡合部581和第二卡合部592而言,也可以是,例如将它们中的任一方设为螺纹或螺旋状的槽,而将另一方设为与螺旋状的槽卡合的突起或螺纹。另外,也可以采用像滚珠丝杠那样的结构,并使第一卡合部581与第二卡合部592经由多个滚珠等中间物而卡合。
119.可动部593相对于轴主体591,以能够沿着轴主体591的中心轴移动的方式安装于轴主体591的上端部。通过将可动部593安装于轴主体591的上端部,在从输送物x1对升降部70施加冲击时能够缓和该冲击。可动部593被弹性体597始终向上方向按压。如图10所示,可动部593具备可动部主体594、多个引导销595、以及多个套筒轴承596a、596b。
120.可动部主体594形成为筒状,并且在上下方向的中间部分具有朝向中央突出的中
间分隔体594a。在中间分隔体594a形成有用于使各引导销595穿过的孔,可动部主体594沿着各引导销595的长度方向(上下方向)移动。
121.引导销595引导可动部主体594的移动。引导销595的长度方向沿着上下方向。引导销595的下端部固定于轴主体591的上端部。多个引导销595绕旋转轴r5(参照图8)以适当间距配置。
122.套筒轴承596a、596b减少可动部主体594相对于轴主体591沿上下方向移动时的摩擦。套筒轴承596a、596b配置在可动部主体594的内表面与轴主体591的外表面之间。在本实施方式中,套筒轴承596a、596b形成为圆筒形状,且安装于可动部主体594的内表面。
123.弹性体597朝向上方向对可动部593进行按压。弹性体597在本实施方式中为螺旋弹簧。但是,弹性体597不限于螺旋弹簧,只要具有弹性即可。弹性体597例如也可以是板簧(包括薄板簧)、碟形弹簧、橡胶弹簧、空气弹簧、防振橡胶、缓冲橡胶等。
124.如图9所示,伸缩盖60是伴随于移动件59的移动而伸缩的盖。伸缩盖60覆盖移动件59及旋转筒58的外周面。伸缩盖60的上端相对于升降部70被固定(具体而言,安装于支承板75)。当移动件59向上方向移动且升降部70上升时,伸缩盖60向上方向伸长。另一方面,当移动件59向下方向移动且升降部70下降时,伸缩盖60向下方向缩短。在本实施方式中,伸缩盖60具备固定筒部601、第一可动筒部602、以及第二可动筒部603。
125.固定筒部601固定于第一板541。固定筒部601具有比旋转筒58的外径大的外径,且相对于旋转筒58配置成同心状。在固定筒部601与旋转筒58之间配置有多个轴承。通过这些多个轴承,能够实现旋转筒58相对于固定筒部601的、绕旋转轴r5的顺畅的旋转。在固定筒部601的上端设置有第一防脱部601a,该第一防脱部601a阻挠第一可动筒部602向上方向脱离。
126.第一可动筒部602相对于固定筒部601能够沿上下方向移动。第一可动筒部602具有比固定筒部601的外径大的外径,且相对于固定筒部601配置成同心状。在第一可动筒部602与固定筒部601之间配置有圆筒状的推力轴承602a。通过该推力轴承602a,能够实现第一可动筒部602相对于固定筒部601的、上下方向的顺畅的移动。在第一可动筒部602的上端设置有第二防脱部602b,该第二防脱部602b阻挠第二可动筒部603相对于第一可动筒部602向上方向脱离。
127.第二可动筒部603相对于第一可动筒部602能够沿上下方向移动。第二可动筒部603具有比第一可动筒部602的外径大的外径,且相对于第一可动筒部602配置成同心状。在第二可动筒部603与第一可动筒部602之间配置有圆筒状的推力轴承603a。通过该推力轴承603a,能够实现第二可动筒部603相对于第一可动筒部602的、上下方向的顺畅的移动。
128.第二可动筒部603的上端如上述那样相对于框体7的支承板75(参照图14)被固定。因此,如图9所示,当移动件59向上方向移动时,升降部70上升,追随于此,第二可动筒部603向上方向移动。在第二可动筒部603向上方向移动的途中,第二可动筒部603的下端经由套筒轴承603a而钩挂于第一可动筒部602的第二防脱部602b,从而将第一可动筒部602向上方向抬起。由此,伸缩盖60向上方向伸长。
129.这样,本实施方式的伸缩盖60是具备固定筒部601、第一可动筒部602及第二可动筒部603的、所谓的伸缩式管状的盖。但是,伸缩盖60也可以是蛇腹状的盖、或者将固定于升降部70的上筒与固定于第一板541的下筒重叠而成的盖。
130.(1.2.4.4.4)引导部
131.引导部61是对支承部56沿上下方向的移动进行引导的部分。如图7所示,引导部61与支承部56相邻配置。引导部61安装于第一板541。如图9所示,引导部61具备可动轴62、第一引导筒构件63、以及第二引导筒构件64。
132.可动轴62相对于升降部70被固定(具体而言,安装于支承板75)。可动轴62在本实施方式中为轴状,但也可以是实心结构或中空结构。可动轴62沿着上下方向延伸,且在下端部形成有凸缘部621。
133.第一引导筒构件63是相对于可动轴62能够沿着可动轴62的长度方向(上下方向)移动的构件。在第一引导筒构件63与可动轴62之间配置有推力轴承63a。在第一引导筒构件63的上端设置有上防脱部63b,该上防脱部63b阻挠推力轴承63a向上方向脱离。在第一引导筒构件63的下端设置有下防脱部63c,该下防脱部63c钩挂于第二引导筒构件64的上端。
134.第二引导筒构件64是相对于第一引导筒构件63能够沿着上下方向移动的构件。在第一引导筒构件63与第二引导筒构件64之间配置有推力轴承64a。在第二引导筒构件64的上端设置有上防脱部64b,该上防脱部64b阻挠推力轴承64a向上方向脱离。第二引导筒构件64的下端固定于第一板541。
135.可动轴62的上端如上述那样相对于升降部70被固定。因此,如图9所示,当支承部56向上方向移动时,升降部70上升,追随于此,可动轴62向上方向移动。当可动轴62向上方向移动时,可动轴62的凸缘部621与推力轴承63a碰触,而将第一引导筒构件63向上方向牵引。此时,通过第二引导筒构件64引导第一引导筒构件63的沿着上下方向的移动,通过第一引导筒构件63引导可动轴62的沿着上下方向的移动。
136.(1.2.4.5)载置传感器
137.图13所示的载置传感器95对输送物x1相对于各升降部70载置的情况进行检测。载置传感器95例如安装于支承部56的移动件59(参照图8)的上端部。载置传感器95在本实施方式中是非接触传感器,具体而言为接近传感器。作为接近传感器,在本实施方式中使用感应式接近传感器,但也可以是静电电容式接近传感器。但是,非接触式传感器也可以是超声波传感器、光电传感器等,并根据输送物x1的属性而适当选择。另外,载置传感器95不限于非接触传感器,也可以是接触传感器。作为接触传感器,可以举出重量传感器作为一例。
138.在本实施方式中,以输出输送物x1接近了载置传感器95的检测结果的情况为根据,检测到输送物x1已载置于升降部70。在本实施方式中,在输送物x1的下方,当升降部70上升时,升降部70与输送物x1的下表面碰触。在该情况下,当输送物x1的下表面与升降部70碰触时,由于载置传感器95输出接近了输送物x1的检测结果,因此以此为根据而检测到在升降部70载置有输送物x1。
139.在本实施方式中,多个载置传感器95与多个升降部70对应地设置。因此,例如当在输送物x1的下表面存在高度差时,由载置传感器95得到的输送物x1的检出的时机是错开的。这些载置传感器95的检测结果被输出至后述的控制部9。
140.(1.2.5)检测部
141.检测部91检测输送装置1的举动、以及输送装置1的周边状况等。这里所说的“举动”是指动作及情形等。也就是,输送装置1的举动包括表示输送装置1行驶中/停止中的输送装置1的动作状态、输送装置1的速度(及速度变化)、作用于输送装置1的加速度、以及输
送装置1的姿势等。具体而言,检测部91例如包括速度传感器、加速度传感器、陀螺仪传感器等传感器,并通过这些传感器来检测输送装置1的举动。另外,检测部91例如包括图像传感器(相机)、声呐传感器、雷达、以及lidar(light detection and ranging)等传感器,并通过这些传感器来检测输送装置1的周边状况。对于输送装置1的周边状况,例如包括有无在输送装置1的行进方向的前方存在的物体(障碍物等)、以及物体的位置(距离及方位)等。对于障碍物,也包括其他移动体1a及人。
142.在本实施方式中,检测部91如图11、12所示,具备多个(在此为四个)高低差传感器93、以及多个(在此为两个)缓冲器传感器(bumper sensor)94。图11是本实施方式的移动体1a的前部的放大图。图12是本实施方式的移动体1a的后部的放大图。
143.高低差传感器93检出移动面100的高低差。高低差传感器93在本实施方式中是以向移动面100照射光的方式检出高低差的光学式传感器(测距传感器)。具体而言,光学式传感器使从发光元件射出的光与对象物接触,并通过受光元件来接受反射回来的光。然后,根据射入受光元件时的位置,使用三角测量原理来测定与对象物之间的距离。受光元件包括psd(position sensing device)、cmos(complementary metal oxide semiconductor)、ccd(charge
‑
coupled device)。但是,作为高低差传感器93,不限于光学式传感器,也可以使用超声波式的测距传感器。
144.如图11、12所示,在底板74形成有使光学式传感器的光穿过的多个孔745。作为多个孔745,设置出光用孔和入光用孔。但是,也可以将出光用孔与入光用孔相连而形成一个孔745。另外,在本实施方式中,孔745未被透明板堵塞,但也可以用透明板堵塞孔745。
145.如图11、12所示,多个高低差传感器93在框体7中配置在前后方向的两端部。而且,如图11所示,在框体7的前部,多个高低差传感器93的排列方向与前后方向交叉。在本实施方式中,多个高低差传感器93的排列方向与左右方向平行。如图12所示,在框体7的后部,多个高低差传感器93的排列方向与前后方向交叉。在本实施方式中,多个高低差传感器93的排列方向与左右方向平行。总之,在本实施方式中,四个高低差传感器93在框体7中配置于四角。因此,多个高低差传感器93在俯视时配置在与移动用马达220、升降用马达510及电池92不同的位置。
146.这样的高低差传感器93与控制部9以能够发送电信号的方式连接,而能够将检出结果向控制部9输出。
147.缓冲器传感器94检测输送装置1在移动中与障碍物接触的情况。缓冲器传感器94设置于框体7的底板74的前后方向的前侧的端部及后侧的端部这两者。当障碍物与缓冲器传感器94接触时,缓冲器传感器94将检测结果向控制部9输出。在本实施方式中,缓冲器传感器94可以用作紧急停止用的传感器。
148.(1.2.6)控制部
149.图13所示的控制部9对多个移动用马达220及多个升降用马达510的驱动进行控制。控制部9与多个移动用马达220、多个升降用马达510、载置传感器95及检测部91连接。在本实施方式中,控制部9按照来自外部的服务器装置等指令部的指示,对移动用马达220及升降用马达510输出控制信号。
150.控制部9以具有一个以上的处理器以及一个以上的存储器的微型控制器为主结构。即,通过由微型控制器的处理器执行记录在微型控制器的存储器中的程序,来实现控制
部9的功能。程序既可以预先记录在存储器中,也可以通过因特网等电通信线路而被提供,也可以记录在存储卡等非暂时的记录介质中而被提供。
151.控制部9当被输入来自载置传感器95及检测部91的检测结果的电信号时,根据检测结果来对升降用马达510及移动用马达220的动作进行控制。本实施方式中的由控制部9进行的升降用马达510及移动用马达220的动作例将在后述的“(1.3)动作”中详述。
152.另外,在本实施方式中,控制部9根据与第一升降部771(参照图14)对应的载置传感器95的检测结果、以及与第二升降部781对应的载置传感器95的检测结果,来执行对输送物x1的种类进行判定的判定处理。控制部9例如取得从基准时刻起到由与第一升降部771对应的载置传感器95检测到输送物x1为止的时间t1、以及从基准时刻起到由与第二升降部781对应的载置传感器95检测到输送物x1为止的时间t2,并算出t1与t2的差量t3。然后,控制部9能够根据该t3的值来判定与输送物x1的下表面的形状相应的种类。
153.在本实施方式中,“基准时刻”是第一升降部771和第二升降部781的动作开始的时刻,但也可以是第一升降部771和第二升降部781在动作中的时刻。
154.控制部9判定输送物x1的种类,并据此来改变移动用马达220及升降用马达510的动作。例如,控制部9通过根据输送物x1的底面的形状、即滚轮箱式托盘的底面的形状来判定装载的货物的种类,而能够根据货物来改变输送装置1的动作。作为一例,控制部9能够根据货物的种类来改变输送物x1的上升量或者改变输送装置1的行驶速度。
155.(1.2.7)电池
156.电池92(参照图17)向移动用马达220及升降用马达510供给电力。具体而言,电池92经由控制部9而向移动用马达220及升降用马达510供给电力。但是,电池92也可以直接向移动用马达220及升降用马达510供给电力。电池92在本实施方式中为锂离子电池。但是,电池92也可以是铅电池、镍氢电池、nas电池(钠硫电池)等。
157.在本实施方式中,电池92在移动用马达220与配置于框体7的前部的升降机构5之间配置(参照图17)。
158.(1.2.8)框体
159.框体7收纳控制部9、移动用马达220、包括升降用马达510在内的升降机构5等。如图14所示,框体7具备框体主体71、多个支承板75、以及盖76。
160.框体主体71是形成框体7的主体的部分。框体主体71是在左右方向上比在前后方向上长且上下方向的尺寸比左右方向及前后方向的尺寸小的长方体状。如上述那样,框体7的上下方向的尺寸比框体7的左右方向的尺寸足够小,以使得本实施方式的框体7收纳于位于输送物x1下方的间隙。框体主体71具备顶板72、多个侧板73、以及底板74(参照图15)。
161.顶板72是框体主体71中构成朝向上方向的面的板。在顶板72形成有俯视时形成于四角的开口(以下,称为升降机构用开口723)、以及吸气用的开口(以下,称为吸气口721)。这些开口721、723将顶板72沿厚度方向贯通,并连通至框体主体71的内部。这里所说的“四角”是指在框体主体71的前后方向的两端部处且具有位于左右方向的两端部的一个范围的部分。
162.多个升降机构5中的至少一部分收纳于框体主体71。各升降机构5在俯视时收纳于升降机构用开口723的内侧,当支承部56向上方向移动时,支承部56穿过升降机构用开口723且从顶板72的上表面向上方向突出。
163.多个侧板73与顶板72及底板74交叉,且是框体主体71中的构成朝向与移动面100平行的方向的外侧(外侧方)的面的板。
164.底板74是框体7中构成朝向下方向的面的板。底板74的下表面与移动面100对置。底板74形成为平板状。如图15所示,底板74具有底板主体741和多个(在此为两个)相邻部742。
165.底板主体741是形成底板74的大部分的部分。在本实施方式中,底板主体741在俯视时与顶板72重叠。底板主体741具有多个(在此为四个)角部。角部是具有包含由底板74的、沿前后方向延伸的边和沿左右方向延伸的边所成的角在内的一个范围的部分。底板主体741在本实施方式中为金属制,但也可以是硬质树脂、石墨、木材等。
166.相邻部742是相对于底板主体741的角部相邻配置的板。在本实施方式中,多个相邻部742相对于底板主体741配置在前后方向的两侧。在本实施方式中,如图22所示,以各相邻部742的下表面位于比底板主体741的下表面靠上方的位置方式将各相邻部742安装于底板主体741。各相邻部742为金属制,在本实施方式中为铝制。底板主体741和相邻部742既可以是相同的材料,也可以是相互不同的材料。
167.如图14所示,多个支承板75以加强的方式对盖76进行支承。在本实施方式中,支承板75的厚度比盖76的厚度厚。多个支承板75配置在框体主体71与盖76之间。多个支承板75配置在分别与第一升降部771和第二升降部781对应的位置。在此,将与第一升降部771对应的支承板75作为“第一支承板751”。另外,将与第二升降部781对应的支承板75作为“第二支承板752”。
168.第一支承板751配置于相对于框体7的前部的升降机构5在俯视时重叠的位置。在第一支承板751分别安装有升降机构5的多个支承部56、多个第二可动筒部603以及多个引导部61的可动轴62。由此,当支承部56向上方向移动时,第一支承板751上升且第一升降部771上升。
169.第二支承板752配置于相对于框体7的后部的升降机构5在俯视时重叠的位置。与第一支承板751同样,在第二支承板752分别安装有框体7的后部的升降机构5的多个支承部56、多个第二可动筒部603以及多个引导部61的可动轴62。由此,当支承部56向上方向移动时,第二支承板752上升且第二升降部781上升。
170.盖76从上方至少覆盖框体主体71。盖76具备第一盖77、第二盖78、以及中间盖79。
171.第一盖77覆盖框体主体71的顶板72的前部。第一盖77具有第一升降部771和一对侧面部772。第一升降部771是相对于移动面100升降,且供输送物x1载置的部分。第一升降部771能够伴随于升降机构5向上方向的移动以及向下方向的移动而进行上升或下降。第一升降部771具有防止输送物x1滑动的在左右方向上分离的一对防滑部771a。
172.第二盖78覆盖框体主体71的顶板72的后部。第二盖78具有第二升降部781和一对侧面部782。与第一升降部771同样,第二升降部781是相对于移动面100升降且供输送物x1载置的部分。第二升降部781能够伴随于升降机构5向上方向的移动以及向下方向的移动而进行上升或下降。第二升降部781具有防止输送物x1滑动的在左右方向上分离的一对防滑部781a。在本发明中,在不需要特别区分的情况下,有时将第一升降部771和第二升降部781分别称为“升降部70”。
173.中间盖79将第一盖77与第二盖78之间相连。中间盖79相对于第一盖77和第二盖78
以能够绕沿左右方向延伸的轴旋转的方式安装。因此,如图16的假想线所示,在第二升降部781位于比第一升降部771高的位置的情况下,中间盖79从第二盖78朝向第一盖77下降倾斜。另外,在第一升降部771位于比第二升降部781高的位置的情况下,中间盖79从第一盖77朝向第二盖78下降倾斜。在第一升降部771和第二升降部781为相同的高度的情况下,中间盖79的上表面与第一盖77的上表面及第二盖78的上表面位于同一平面上。
174.(1.2.9)设备的配置
175.接下来,对收纳于框体7的设备的配置进行说明。如图17所示,本实施方式的输送装置1具备多个升降用马达510、多个移动用马达220、电池92、以及多个高低差传感器93。这些多个升降用马达510、多个移动用马达220、电池92以及多个高低差传感器93在俯视时(即,在沿与移动面100正交的方向观察时)是分散的。在此,本发明中所说的“分散”是指各要素在俯视时未重合,例如两个要素仅相邻而在俯视时未重合的情况包含在“分散”中。
176.另外,在此所说的“多个升降用马达510”、”多个移动用马达220”、”电池92”以及“多个高低差传感器93”仅表示主体部分,例如不包含电缆、附件等。因此,例如,在两个移动用马达220相邻的情况下,即使是在俯视时一个移动用马达220的电缆与另一个移动用马达220的电缆重合的情况,也包含在本发明所说的“分散”中。另外,在两个移动用马达220相邻的情况下,即使是一个移动用马达220的电缆与另一个移动用马达220的主体部分重合的情况,也包含在本发明所说的“分散”中。
177.因此,多个移动用马达220及电池92在俯视时配置在不同的位置。与“分散”同样,本发明中所说的“配置在不同的位置”是指各要素在俯视时未重合,并且各要素之间的距离没有特别限定。
178.多个升降用马达510、多个移动用马达220、电池92以及多个检测部91在俯视时是分散的。但是,如图18所示,对于多个升降用马达510、多个移动用马达220、电池92以及多个高低差传感器93而言,它们的至少一部分位于与移动面100平行的一个假想面上。总之,多个升降用马达510、多个移动用马达220、电池92以及多个高低差传感器93在沿与移动面100平行的方向观察时至少一部分是重叠的。特别是,在本实施方式中,多个升降用马达510、多个移动用马达220以及多个高低差传感器93收纳在电池92的厚度(上下方向的尺寸)内。
179.因此,在本实施方式的输送装置1中,主要的部件在俯视时分散而且在上下方向上收纳在一定的高度内,因此能够尽量地减小框体7的上下方向的尺寸。由此,可以实现具有能够进入到处于输送物x1下方的间隙的高度尺寸的输送装置1。
180.(1.2.10)吸气口/排气口
181.在图19中示出本实施方式的输送装置1的俯视图。移动体1a具备吸气口721和多个排气口743(参照图20)。利用从吸气口721吸入到框体7的内部的空气,能够与实现移动用马达220、升降用马达510及控制部9的基板中的至少一个进行热交换,之后通过将空气从排气口743排出,而能够进行框体7的内部的冷却。
182.吸气口721是用于将空气吸入至框体主体71的内部(即,框体7的内部)的开口。如图14所示,吸气口721形成于框体主体71的顶板72,并连通至框体主体71的内部。本实施方式的吸气口721形成于在俯视时与第二盖78和中间盖79之间的间隙791(参照图21)重叠的位置或者该位置的附近。
183.排气口743是将框体主体71的内部的空气向外部排出的开口。本发明中所说的“外
部”是指输送装置1的外侧的空间,不限于室内还是室外。排气口743形成于比吸气口721靠下方的位置。在本实施方式中,如图20所示,排气口743形成于底板74。但是,排气口743也可以形成于框体主体71的侧板73,当通过在顶板72形成高低差等而在顶板72的上表面存在高度差的情况下,排气口743也可以形成于顶板72。
184.然而,假定与本实施方式的输送装置1不同而构成为,在底板74形成有吸气口721,并从底板74与移动面100之间吸入空气。在该结构的情况下,若移动面100被润湿、或者移动面100被灰尘等弄脏,则水分、灰尘等容易随着从吸气口721吸入的空气进入至框体7的内部。
185.然而,在本实施方式中,由于吸气口721朝向上方向,并且排气口743形成于比吸气口721靠下方的位置,因此能够抑制水分、灰尘等被吸入框体7的内部。总之,在本实施方式的输送装置1中,虽然抑制向框体7的内部的浸水,但也能够抑制框体7的内部中的温度上升。
186.另外,本实施方式的输送装置1具备多个(在此为两个)风扇744(参照图19),它们用于形成以从外部至吸气口721、框体7的内部、排气口743、再至外部的顺序流动的空气的流动(气流)。在本实施方式中,风扇744配置在底板74的上表面中的与多个排气口743对应的位置。由此,能够形成强制性地将空气从外部吸入且从框体7的内部向外部排出这样的气流。
187.在本实施方式中,在输送装置1中,具备多个风扇744以与多个排气口743成为一对一的关系,但也可以相对于多个排气口743具备一个风扇744,也可以相对于一个排气口743具备多个风扇744。
188.在图21中示出吸气口721的周边的放大图。在吸气口721安装有具有堰部725的内盖722、外盖726、以及形成有多个透孔的透孔板727。
189.在透孔板727形成有多个透孔(贯通孔)。透孔板727在一定程度上抑制水分、灰尘等的侵入,并且能够使空气通过。透孔板727载置于内盖722,并以覆盖吸气口721的方式配置。
190.内盖722具备嵌入吸气口721的嵌入部724、以及从嵌入部724向吸气口721的外侧延伸而成的堰部725。堰部725在俯视时包围吸气口721。在本实施方式中,堰部725以在内盖722的外周的全长的范围内连续的方式形成。堰部725从框体主体71的顶板72的上表面向上方向突出。通过设置堰部725,能够抑制气流所载有的水分、灰尘等的侵入。
191.在本实施方式中,堰部725由与框体7不同的构件设置,但不限于此。堰部725例如也可以相对于框体7通过焊接等形成,也可以以对框体7的顶板72实施压花加工等并包围吸气口721的方式一体地形成堰部725。另外,在本实施方式中,堰部725在吸气口721的外周的全长的范围内连续,但也可以部分地间断。
192.(1.2.11)保护体
193.如图22所示,本实施方式的输送装置1具备在框体7的底板74安装的多个(在此为两个)保护体8。多个保护体8是阻挠框体7的底面与移动面100接触的构件。保护体8的至少一部分位于框体7中的金属板(在此为相邻部742)与移动面100之间。
194.本发明中所说的“金属板与移动面100之间”是指底板74与移动面100接近了的状态下的、金属板与移动面100之间。在本实施方式中,多个保护体8安装于底板74中的底板主
体741,但在底板74与移动面100接近了的状态下,在金属板与移动面100之间夹设有多个保护体8来阻挠金属板与移动面100接触。
195.保护体8在本实施方式中为树脂制,具体而言为白色的mc尼龙(注册商标)。但是,保护体8也可以由橡胶、高弹体、聚氨酯、尼龙、苯酚、聚碳酸酯等构成。保护体8可以不是块状,也可以是封条状、片状等。优选保护体8的颜色是与移动面100的颜色同色系的颜色。
196.在本实施方式中,保护体8相对于底板74被固定件固定。在保护体8形成有收纳固定件的头部的锪孔加工部81。由此,在相对于底板74安装有保护体8的状态下,固定件的头部不从保护体8的表面(最下表面)突出。由此,能够防止固定件与移动面100接触。对于锪孔加工部81,包括深锪孔、沉头锪孔等。
197.在本实施方式中,保护体8以相对于底板74能够拆卸的方式安装。在本实施方式中,“能够拆卸”通过将固定件作为螺钉来实现。作为将保护体8以相对于底板74能够拆卸的方式安装的结构,例如可以例示嵌合、钩挂、粘接、插入等。
198.保护体8在前后方向中的至少前侧的下角部形成有倒角82。在本实施方式中,保护体8也在前后方向中的后侧的下角部形成有倒角83。保护体8形成为随着趋向下方向而宽度变狭的剖面梯形状。
199.如图15所示,多个保护体8安装于底板主体741的至少两个角部。这里所说的两个角部是底板主体741的前后方向的后侧的角部。多个角部与多个保护体8的关系为一对一的关系。另外,在本实施方式中,多个保护体8在从下方观察时(以下称为仰视)配置于在前后方向上比辅助轮45靠外侧的位置。在本实施方式中,保护体8在底板主体741的后部配置在比后侧的辅助轮45靠前后方向的外侧的位置,但也可以在底板主体741的前部配置在比前侧的辅助轮45靠前后方向的外侧的位置。另外,保护体8也可以配置于底板主体741的全部角部。
200.另外,保护体8在底板主体741的后部配置在比后侧的辅助轮45靠前后方向的外侧的位置。在此,将前后方向的后侧的第二辅助轮单元3b的缓冲机构39设为第二缓冲机构39,并将前侧的第一辅助轮单元3a的缓冲机构39设为第一缓冲机构39。保护体8与第二缓冲机构39的距离d1比保护体8与第一缓冲机构39的距离d2小。
201.(1.3)动作
202.以下,对本实施方式的输送装置1的动作进行说明。
203.(1.3.1)输送装置的基本动作
204.首先,对输送装置1的基本动作进行说明。输送装置1在稳定时通过由控制部9控制移动用马达220来驱动多个驱动轮28,而在移动面100自主行驶。此时,输送装置1按照存储在存储器(例如,控制部9的存储器)中的电子地图在移动面100自主行驶。电子地图例如能够通过与外部系统之间的无线通信来进行更新。另外,输送装置1在行驶中,通过检测部91来检测输送装置1的周边状况等。并且,输送装置1例如在通过检测部91检测到阻挠行驶的障碍物的情况下,当场停止并待机到由作业者等将障碍物从当场除去为止。当由检测部91进行的障碍物的检测断开时,输送装置1再次开始移动。
205.但是,在本发明的输送装置1中,在通过检测部91检测到阻挠行驶的障碍物的情况下,也可以在不脱离移动路径的范围内以躲避障碍物的方式自主行。
206.另外,输送装置1在接受了输送指令的情况下,当到达输送物x1的位置时供输送物
x1载置。具体而言,输送装置1首先在升降部70位于可动区域的下限位置的状态下钻入输送物x1的下方。在该状态下,通过使升降用马达510工作并使升降部70上升到可动区域的上限位置,而通过升降部70将输送物x1抬起。由此,能够将输送物x1装载于升降部70。
207.(1.3.2)动作例
208.输送装置1根据检测部91的检测结果,例如如下进行动作。在本实施方式中,在利用高低差传感器93检测到在移动面100存在高低差的情况下,控制部9控制移动用马达220来使输送装置1停止。在利用高低差传感器93检测到在移动面100存在高低差的情况下,也可以是,输送装置1以进行后退或回转来躲避高低差的方式自主行驶。
209.在此,在本实施方式中,当由在框体7的四角配置的多个高低差传感器93中的任一个检测到规定以上(例如,35mm以上)的高低差时,使移动用马达220停止。在由框体7的四角的高低差传感器93中的前侧的一对高低差传感器93检测到高低差的情况下,也可以使输送装置1后退。另外,在前侧的一对高低差传感器93中的仅一个高低差传感器93检测到高低差的情况下,也可以使输送装置1向左右方向中的与检测到高低差的一侧相反的一侧回转。另外,也可以组合声呐传感器和高低差传感器93的检测结果,来适当设定输送装置1的动作。
210.(1.3.3)升降部的上升动作的例
211.控制部9在输送装置1钻入到输送物x1的下方的状态下,通过使升降用马达510动作来使升降部70上升。此时,控制部9使第一升降部771与第二升降部781同步地上升。
212.在输送物x1的下表面的形状不同的情况下(例如,在与第一升降部771对应的部位比与第二升降部781对应的部位低的情况下),如下进行动作。输送装置1使第一升降部771与第二升降部781同步地上升。这样一来,最初由与第一升降部771对应的载置传感器95检测到输送物x1。此时,与第二升降部781对应的载置传感器95未检测到输送物x1,但对于第二升降部781而言,其维持原样持续上升一定时间。
213.当使第二升降部781上升一定时间后,将输送物x1载置于第二升降部781。这样一来,与第二升降部781对应的载置传感器95检测到输送物x1,如上述那样,利用从基准时刻起到各载置传感器95检测到输送物x1为止的时间的差量,来判定输送物x1的种类,并执行与输送物x1的种类相应的动作。在该情况下,在本实施方式中,使第一升降部771和第二升降部781上升一定尺寸(例如,20mm)。
214.即使使第二升降部781上升一定时间,在与第二升降部781对应的载置传感器95未检测到输送物x1的情况下,也可以停止上升,或者在暂时停止后使第一升降部771及第二升降部781下降。
215.另外,也可以根据输送物x1的种类来改变使第一升降部771和第二升降部781上升的尺寸,也可以改变移动体1a的移动速度。这样,在本实施方式中,控制部9进行控制,以根据从基准时刻起到由多个载置传感器95检测到载置有输送物x1(载置物)的时刻的时间差,来改变多个升降部70的动作。
216.(2)变形例
217.上述实施方式只不过是本发明的各种实施方式之一。实施方式只要能够实现本发明的目的,则能够根据设计等进行各种变更。以下列举实施方式的变形例。以下说明的变形例能够适当进行组合来应用。
218.在上述实施方式中,移动体1a是输送装置1,但移动体1a不限于通过车轮10绕与移
动面100平行的旋转轴旋转从而移动的移动体1a。移动体1a包括例如利用齿条
‑
小齿轮移动的移动体1a、通过牵引金属丝而移动的移动体1a等。
219.移动体1a包括无人输送车(agv:automated guided vehicle)、移动机器人及无人机等。本发明中所说的“移动机器人”例如是车轮10型、履带451型的机器人。移动体1a不仅在规定区域内移动,例如还可以具有执行输送、拣选、焊接、实际安装、陈列、接客、警备、组装以及检查等各种作业的功能。
220.在上述实施方式中,用于使移动面100移动的驱动源22为移动用马达220,但例如也可以是直动式的致动器而不限于马达。另外,对于升降用马达510也同样。
221.在上述实施方式中,驱动轮28配置在两个辅助轮45之间,但也可以将驱动轮28配置在两个辅助轮45之间并将其他驱动轮28配置在两个辅助轮45的外侧。另外,也可以将辅助轮45和驱动轮28在前后方向上交替地配置。
222.在上述实施方式中,在输送装置1中,作为在比驱动轮28靠前方的位置配置的辅助轮45,具备在左右方向的中央配置的一个辅助轮45,但也可以具备在左右方向上分离的多个辅助轮45。同样,在输送装置1中,作为在比驱动轮28靠后方的位置配置的辅助轮45,也可以具备在左右方向上分离的多个辅助轮45。
223.在上述实施方式中,输送装置1具备四个缓冲弹簧44,但也可以具备仅在一个对角配置的两个缓冲弹簧44。另外,输送装置1也可以在俯视时可动框架40的中央具备一个缓冲弹簧44。总之,缓冲弹簧44为至少一个即可。
224.在上述实施方式的输送装置1中,在移动面100上对支承于车轮10的框体7进行支承。车轮10的旋转轴r1如上述那样沿着水平方向延伸。在本实施方式的输送装置1中,作为多个车轮10,具备多个(在此为两个)驱动轮28和多个(在此为两个)辅助轮45。但是,也可以是,多个车轮10全部为驱动轮28,也可以是,多个车轮10中的一个为驱动轮28而其他全部为辅助轮45,也可以是,多个车轮10中的一个为辅助轮45而其他全部为驱动轮28。
225.在上述实施方式中,辅助轮45是车轮10,但本发明中所说的“辅助轮45”也包括在移动面100上滚动的球体。
226.本发明中的输送装置1(移动体1a)包括计算机系统。计算机系统以作为硬件的处理器及存储器为主结构。通过由处理器执行在计算机系统的存储器中记录的程序,来实现本发明中的作为输送装置1(移动体1a)的功能。程序可以预先记录在计算机系统的存储器中,也可以通过电通信线路来被提供,也可以通过记录在能够由计算机系统读取的存储卡、光盘、硬盘驱动器等非暂时的记录介质中而被提供。计算机系统的处理器由包括半导体集成电路(ic)或大规模集成电路(lsi)的一个或多个电路构成。这里所说的ic或lsi等集成电路根据集成的程度而称呼方式不同,包括被称为系统lsi、vlsi(very large scale integration)或ulsi(ultra large scale integration)的集成电路。对于在lsi的制造后被编程的fpga(field
‑
programmable gate array)、或者能够进行lsi内部的接合关系的重构或lsi内部的电路分区的重构的逻辑器件,也能够采用为处理器。多个电路可以集中于一个芯片,也可以分散设置于多个芯片。多个芯片可以集中于一个装置,也可以分散设置于多个装置。这里所说的计算机系统包括具有一个以上的处理器以及一个以上的存储器的微型控制器。因此,对于微型控制器也可以由包括半导体集成电路或大规模集成电路的一个或多个电路构成。
227.另外,在本发明中,有时使用像“大致平行”或“大致正交”那样带有“大致”的表达。例如,“大致平行”是指实质上“平行”,不仅包括严格“平行”的状态,也包括百分之几程度的误差。对于其他带有“大致”的表达也同样。
228.另外,在本发明中使用像“前端部”及“前端”等那样按
“…
端部”和
“…
端”进行区分的表达。例如,“前端部”是指具有包含“前端”在内的一定范围的部分。对于其他带有
“…
端部”的表达也同样。
229.(3)方案
230.如以上说明的那样,第一方案的移动体(1a)具备框体(7)、移动用马达(220)、以及电池(92)。移动用马达(220)使框体(7)沿着移动面(100)移动。电池(92)向移动用马达(220)供给电力。在移动体(1a)中,移动用马达(220)及电池(92)在沿与移动面(100)正交的方向观察时配置在不同的位置。
231.根据该方案,由于在与移动面(100)正交的方向上,移动用马达(220)与电池(92)未重叠,因此能够将框体(7)在与移动面(100)正交的方向上的尺寸抑制得尽量小。
232.在第二方案的移动体(1a)中,在第一方案的基础上还具备升降用马达(510),该升降用马达(510)使能够相对于移动面(100)升降的升降部(70)动作。升降用马达(510)、移动用马达(220)及电池(92)在沿与移动面(100)正交的方向观察时是分散的。
233.根据该方案,在与移动面(100)正交的方向上,由于升降用马达(510)、移动用马达(220)及电池(92)未重叠,因此能够将框体(7)在与移动面(100)正交的方向上的尺寸抑制得尽量小。
234.在第三方案的移动体(1a)中,在第二方案的基础上具备多个升降用马达(510)。基于移动用马达(220)的移动方向是前后方向中的至少一个方向。多个升降用马达(510)在前后方向上是分离的。
235.根据该方案,虽然配置了多个升降用马达(510),但也能够将框体(7)在与行驶面(移动面100)正交的方向上的尺寸抑制得尽量小。
236.在第四方案的移动体(1a)中,在第三方案的基础上将移动用马达(220)配置在多个升降用马达(510)之间。
237.根据该方案,虽然配置了多个升降用马达(510)及移动用马达(220),但也能够将框体(7)在与移动面(100)正交的方向上的尺寸抑制得尽量小。
238.在第五方案的移动体(1a)中,在第一至第四中的任一个方案的基础上,移动用马达(220)及电池(92)在沿与移动面(100)平行的方向观察时至少一部分是重叠的。
239.根据该方案,由于能够在与移动面(100)正交的方向上将移动用马达(220)及电池(92)进行集中,因此能够将框体(7)在与移动面(100)正交的方向上的尺寸抑制得尽量小。
240.在第六方案的移动体(1a)中,在第一至第五中的任一个方案的基础上还具备检出移动面(100)的高低差的至少一个高低差传感器(93)。高低差传感器(93)、移动用马达(220)及电池(92)在沿与移动面(100)正交的方向观察时是分散的。
241.根据该方案,即使设置了多个高低差传感器(93),也能够抑制框体(7)在与移动面(100)正交的方向上的尺寸变大。
242.在第七方案的移动体(1a)中,在第六方案的基础上,基于移动用马达(220)的移动方向是前后方向中的至少一个方向。移动体(1a)至少具备四个高低差传感器(93)。四个高
低差传感器(93)在移动体(1a)的前后方向的两端部处,以在与前后方向交叉的方向上分离的方式配置。详细而言,四个高低差传感器(93)中的两个高低差传感器(93)配置于移动体(1a)的前后方向的前侧的端部且排列方向与前后方向交叉。另外两个高低差传感器(93)配置于移动体(1a)的前后方向的后侧的端部且排列方向与前后方向交叉。
243.根据该方案,不管移动体(1a)向沿着移动面(100)的哪个方向移动,都能够对位于移动面(100)的高低差进行检测。
244.在第八方案的移动体(1a)中,在第六或第七方案的基础上,高低差传感器(93)是配置于框体(7)的底板(74)且使光照射到移动面(100)来检出高低差的光学式传感器。在框体(7)中的与移动面(100)对置面形成有使光穿过的至少一个孔(745)。
245.根据该方案,能够将高低差传感器(93)配置在框体(7)的底板(74)上,而能够实现沿着移动面(100)的方向上的小型化。
246.在第九方案的移动体(1a)中,在第一至第八中的任一个方案的基础上,移动体(1a)是供输送物(x1)载置于能够相对于移动面(100)升降的升降部(70)的输送装置(1)。
247.根据该方案,能够将与移动面(100)正交的方向的尺寸小的移动体(1a)有效利用于输送装置(1)。
248.第十方案的移动体(1a)在第一至第八中的任一个方案的基础上还具备相对于移动面(100)升降且供输送物(x1)载置的多个升降部(70)。多个升降部(70)构成为独立地升降。
249.根据该方案,能够根据输送物(x1)的下表面的形状来使升降部(70)上升,并且相对于下表面的形状不同的多个种类的输送物(x1),能够以稳定的状态使输送物(x1)上升。
250.第十一方案的移动体(1a)在第一至第十中的任一个方案的基础上,还具备至少一个驱动轮(28)、至少一个辅助轮(45)、以及至少一个缓冲机构(39)。驱动轮(28)利用从驱动源(22)传递来的动力进行驱动。辅助轮(45)辅助基于驱动轮(28)的移动。缓冲机构(39)缓和从辅助轮(45)输入的冲击。
251.根据该方案,即使在移动面(100)存在凹凸,也能够稳定地行驶。
252.第十二方案的移动体(1a)在第一至第十一中的任一个方案的基础上,还具备在移动面(100)上对框体(7)进行支承的驱动轮(28)、以及配置在框体(7)内且对驱动轮(28)进行驱动的驱动源(22)。框体(7)具备以向上方向开口的方式形成的至少一个吸气口(721)、以及至少一个排气口(743)。排气口(743)连通至吸气口(721),且形成于比吸气口(721)靠下方的位置。
253.根据该方案,虽然抑制向框体(7)的内部的浸水,但也能够抑制在框体(7)的内部配置的驱动源(22)的温度上升。
254.第十三方案的移动体(1a)在第一至第十二中的任一个方案的基础上,还具备至少一个树脂制的保护体(8)。框体(7)具有与移动面(100)对置且至少一部分为金属板的底板(74)。保护体(8)的至少一部分位于金属板与移动面(100)之间。
255.根据该方案,能够抑制金属板与移动面(100)接触,而能够抑制移动面(100)和底板(74)中的至少一方损伤。
256.在第十四方案的移动体(1a)中,在第十方案的基础上还具备以相对于多个升降部(70)一对一的方式设置的多个升降机构(5)。多个升降机构(5)分别具有:多个支承部(56),
它们对多个升降部(70)中的一个升降部(70)进行支承并使一个升降部(70)沿着升降方向移动;以及一个驱动源(51),其使多个支承部(56)移动。
257.根据该方案,能够对各升降部(70)实现稳定的升降方向的移动。
258.在第十五方案的移动体(1a)中,在第十或第十四方案的基础上还具备将多个升降部(70)之间相连的中间盖(79)。
259.根据该方案,能够抑制在各升降部(70)的移动中夹持物体。
260.在第十六方案的移动体(1a)中,在第十、第十四至第十五中的任一个方案的基础上,还具备对多个升降部(70)分别检测到载置有输送物(x1)的情况的多个载置传感器(95)。
261.根据该方案,能够在升降部(70)上升时,检测到在升降部(70)载置有输送物(x1)。
262.在第十七方案的移动体(1a)中,第十六方案的基础上,多个载置传感器(95)分别为非接触式传感器。
263.根据该方案,即使对升降部(70)例如从输送物(x1)施加冲击,也能够抑制载置传感器(95)破损。
264.在第十八方案的移动体(1a)中,在第十、第十四至第十七中的任一个方案的基础上,根据从基准时刻起到由多个升降部(70)中的多个载置传感器(95)检测到载置有输送物(x1)的时刻的时间差,来改变多个升降部(70)的动作。
265.根据该方案,能够执行与下表面的形状不同的多个种类的输送物(x1)相应的动作。
266.在第十九方案的移动体(1a)中,在第十、第十四至第十八中的任一个方案的基础上,具有第一升降部(771)和第二升降部(781)。第一升降部(771)是多个升降部(70)中的一个。第二升降部(781)是多个升降部(70)中的另外一个且配置在与第一升降部(771)分离的位置。
267.根据该方案,能够使大的输送物(x1)在沿着移动面(100)的方向上稳定地上升。
268.在第二十方案的移动体(1a)中,在第十一方案的基础上,未设置有缓和从驱动轮(28)输入的冲击的缓冲机构(39)。
269.当在驱动轮(28)设置缓冲机构(39)时,作为移动体(1a),其上下方向的尺寸不得不变大,但根据该方案,由于能够由辅助轮(45)缓和冲击,因此能够抑制移动体(1a)的上下方向的尺寸。
270.在第二十一方案的移动体(1a)中,在第十一或第二十方案的基础上具备多个辅助轮(45)及多个缓冲机构(39)。多个缓冲机构(39)分别具有至少一个缓冲弹簧(44)。在与多个辅助轮(45)中的任一个辅助轮(45)对应的缓冲机构(39)、以及与多个辅助轮(45)中的另外一个辅助轮(45)对应的缓冲机构(39)中,缓冲弹簧(44)的总挠度不同。
271.根据该方案,虽然确保了移动体(1a)整体的挠度量,但对于想要抑制挠度量的部分,也能够抑制挠度量。
272.在第二十二方案的移动体(1a)中,在第二十一方案的基础上,驱动轮(28)配置在多个辅助轮(45)之间。
273.根据该方案,能够平衡良好地配置辅助轮(45)。
274.在第二十三方案的移动体(1a)中,在第十一、第二十至第二十二中的任一个方案
的基础上还具备辅助轮支承部(34)。辅助轮支承部(34)将辅助轮(45)支承为能够绕沿着移动面(100)延伸的旋转轴旋转,并且能够绕与移动面(100)正交的轴旋转。
275.根据该方案,能够根据驱动轮(28)的动作来使辅助轮(45)转动,作为移动体(1a),能够实现适当的动作。
276.在第二十四方案的移动体(1a)中,在第十二方案的基础上,排气口(743)形成于框体(7)的底面。
277.根据该方案,即使移动面(100)被润湿,也能够抑制从排气口(743)浸水。
278.在第二十五方案的移动体(1a)中,在第十二或第二十四方案的基础上,还具备至少一个风扇(744),该至少一个风扇(744)形成从吸气口(721)吸入框体(7)内并从排气口(743)排出的气流。
279.根据该方案,由于能够强制性地从吸气口(721)将空气吸入框体(7)内并从排气口(743)将空气排出,因此虽然进一步抑制向框体(7)内的浸水,但也能够抑制框体(7)内的驱动源(51)等的温度上升。
280.在第二十六方案的移动体(1a)中,在第十二、第二十四至第二十五中的任一个方案的基础上还具备包围吸气口(721)的堰部(725)。
281.根据该方案,能够抑制从吸气口(721)浸入的水。
282.在第二十七方案的移动体(1a)中,在第十二、第二十四至第二十六中的任一个方案的基础上,框体(7)具有多个排气口(743)。
283.根据该方案,与排气口(743)为一个的情况相比,能够增加排气的流量。
284.在第二十八方案的移动体(1a)中,在第十三方案的基础上,保护体(8)相对于底板(74)被至少一个固定件固定。
285.根据该方案,能够稳定保护体(8)的安装状态。
286.在第二十九方案的移动体(1a)中,在第二十八方案的基础上,在保护体(8)形成有将固定件的头部收纳的锪孔加工部(81)。
287.根据该方案,由于能够使固定件的头部不从保护体(8)突出,因此能够利用固定件的头部来抑制行驶面损伤。
288.在第三十方案的移动体(1a)中,在第十三、第二十八至第二十九中的任一个方案的基础上,保护体(8)以能够相对于框体(7)拆卸的方式安装。
289.根据该方案,能够在保护体(8)磨损时进行更换。
290.第三十一方案的移动体(1a)中,在第十三、第二十八至第三十中的任一个方案的基础上具备多个保护体(8)。底板(74)具有:底板主体741,其具有多个角部;以及作为金属板的至少一个相邻部(742),其与多个角部相邻。多个保护体(8)设置于多个角部。
291.根据该方案,能够适当地保护移动面(100)和底板(74)中的至少一方。
292.第三十二方案的移动体(1a)中,在第十三、第二十八至第三十一中的任一个方案的基础上,还具备在移动面(100)上对框体(7)进行支承且在移动方向上分离的多个车轮(10)。保护体(8)设置于在移动方向上比车轮(10)靠外侧的位置。
293.根据该方案,当底板(74)倾斜时,能够由保护体(8)适当地保护移动面(100)和底板(74)中的至少一方。
294.第三十三方案的移动体(1a)中,在第三十二方案的基础上,还具备缓和从多个车
轮(10)中的至少两个车轮(10)输入的冲击的至少两个缓冲机构(39)。两个缓冲机构(39)中的一个是具有至少一个缓冲弹簧(44)的第一缓冲机构。两个缓冲机构(39)中的另一个是具有总挠度比缓冲弹簧(44)小的缓冲弹簧(44)的第二缓冲机构。多个保护体(8)分别与第一缓冲机构之间的距离(d1)比多个保护体(8)分别与第二缓冲机构之间的距离(d2)短。
295.根据该方案,在具有缓冲弹簧(44)的总挠度存在差异的缓冲机构(39)的移动体(1a)中,能够适当地保护移动面(100)和底板(74)中的至少一方。
296.在第三十四方案的移动体(1a)中,在第十三、第二十八至第三十三中的任一个方案的基础上,多个保护体(8)配置于框体(7)的后部。
297.根据该方案,在猛烈移动的移动体(1a)中,即使后部接近移动面(100),也能够适当地保护移动面(100)和底板(74)中的至少一方。
298.在第三十五方案的移动体(1a)中,在第十三、第二十八至第三十四中的任一个方案的基础上,保护体(8)的前侧的下角部被倒角。
299.根据该方案,即使在保护体(8)与行驶面接触时,也能够使保护体(8)相对于行驶面以面状接触。
300.对于第二至第三十五方案的结构,不是移动体(1a)所需的结构可以适当省略。
301.附图标记说明:
302.1 输送装置
303.1a 移动体
304.10 车轮
305.22 驱动源
306.220 移动用马达
307.28 驱动轮
308.39 缓冲机构
309.45 辅助轮
310.510 升降用马达
311.7 框体
312.70 升降部
313.721 吸气口
314.74 底板
315.743 排气口
316.8 保护体
317.92 电池
318.93 高低差传感器
319.100 移动面
320.x1 输送物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

