1.本实用新型涉及轨道检修领域,特别是涉及一种远程检测轨道装置。
背景技术:
2.原电机车井下轨道维护人员每天需步行检查维护轨道,检修效率低下,在这种情况下也会遗漏一些急需更换的轨道。人工步行检查矿车轨道,效率低下且费时费力,如果不及时对轨道进行维修,容易造成安全隐患。
技术实现要素:
3.本实用新型的目的是提供一种远程检测轨道装置,提高了轨道检测效率。
4.为实现上述目的,本实用新型提供了一种远程检测轨道装置,所述装置包括:
5.电机车,所述电机车包括电机车主动轮和电机车从动轮;所述电机车主动轮带动所述电机车从动轮转动;
6.第一编码器,用于检测所述电机车从动轮旋转的圈数;
7.矿车,所述矿车包括矿车主动轮和矿车从动轮;所述矿车主动轮带动所述矿车从动轮转动;所述电机车牵引所述矿车前进;
8.第二编码器,用于检测所述矿车从动轮旋转的圈数;
9.plc控制器,分别与所述第一编码器和所述第二编码器连接,用于根据所述第一编码器采集的圈数和所述第二编码器采集的圈数确定打滑位置和打滑位置处的打滑次数。
10.可选地,所述plc控制器将所述第一编码器采集的圈数和所述第二编码器采集的圈数作差,获得圈数差,判断所述圈数差是否大于或等于kn,其中,k为大于或等于1的正整数,n为设定圈数;如果所述圈数差大于或等于kn,则根据所述第二编码器采集的圈数确定打滑位置,并记录打滑位置处的打滑次数。
11.可选地,所述plc控制器判断打滑位置处的打滑次数是否大于或等于设定次数;如果打滑位置处的打滑次数大于或等于所述设定次数,则说明打滑位置处需要检修。
12.可选地,所述装置还包括:
13.第一联轴器,用于连接所述电机车从动轮与所述第一编码器。
14.可选地,所述装置还包括:
15.第二联轴器,用于连接所述矿车从动轮与所述第二编码器。
16.可选地,根据所述第二编码器采集的圈数确定打滑位置的具体公式为:
17.s = np;
18.其中,s为所述打滑位置,n为所述第二编码器采集的圈数,p为所述第二编码器采集的圈数与米数之间的转换系数。
19.根据本实用新型提供的具体实施例,本实用新型公开了以下技术效果:
20.本实用新型提供了一种远程检测轨道装置,所述装置包括:电机车、矿车、第一编码器、第二编码器和plc控制器;电机车包括电机车主动轮和电机车从动轮,矿车包括矿车
主动轮和矿车从动轮,电机车牵引矿车前进,电机车和矿车的主动轮带动从动轮转动;第一编码器用于检测电机车从动轮旋转的圈数,第二编码器用于检测矿车从动轮旋转的圈数;plc控制器分别与第一编码器和第二编码器连接,根据第一编码器采集的圈数和第二编码器采集的圈数确定打滑位置和打滑位置处的打滑次数,实现了远程检测轨道,提高了轨道检测效率。
附图说明
21.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
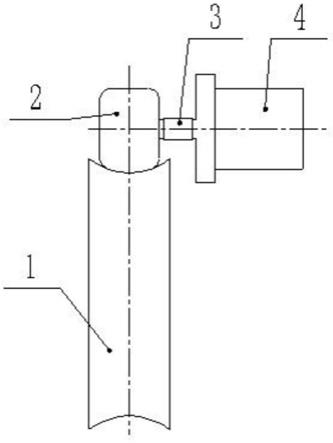
22.图1为本实用新型实施例电机车主动轮与第一编码器连接示意图;
23.其中,1、电机车主动轮,2、电机车从动轮,3、第一联轴器,4、第一编码器。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.本实用新型的目的是提供一种远程检测轨道装置,提高了轨道检测效率。
26.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
27.本实用新型提供一种远程检测轨道装置,所述装置包括:电机车、第一编码器4、矿车、第二编码器和plc控制器。所述电机车包括电机车主动轮1和电机车从动轮2;所述电机车主动轮1带动所述电机车从动轮2转动;所述第一编码器4用于检测所述电机车从动轮2旋转的圈数;如图1所示,图1为本实用新型实施例电机车主动轮与第一编码器连接示意图;所述电机车的电机车主动轮1、电机车从动轮2、第一联轴器3和第一编码器4的连接关系与所述矿车的矿车主动轮、矿车从动轮、第二联轴器和第二编码器连接关系相同;所述矿车包括矿车主动轮和矿车从动轮;所述矿车主动轮带动所述矿车从动轮转动;所述电机车牵引所述矿车前进;所述第二编码器用于检测所述矿车从动轮旋转的圈数。
28.所述plc控制器分别与所述第一编码器4和所述第二编码器连接,用于根据所述第一编码器4采集的圈数和所述第二编码器采集的圈数确定打滑位置和打滑位置处的打滑次数。
29.在本实施例中,当所述电机车遇到打滑时,所述电机车主动轮1和所述电机车从动轮2继续转动但不会向前移动,所述第一编码器4继续计数。
30.当所述电机车遇到打滑时,所述矿车主动轮和所述矿车从动轮停止转动,所述第二编码器不会计数。
31.在本实施例中,所述plc控制器将所述第一编码器4采集的圈数和所述第二编码器采集的圈数作差,获得圈数差,判断所述圈数差是否大于或等于kn,其中,k为大于或等于1
的正整数,n为设定圈数;如果所述圈数差大于或等于kn,则根据所述第二编码器采集的圈数确定打滑位置,并记录打滑位置处的打滑次数。所述plc控制器判断打滑位置处的打滑次数是否大于或等于设定次数;如果打滑位置处的打滑次数大于或等于所述设定次数,则说明打滑位置处需要检修。
32.在本实施例中,所述装置还包括:第一联轴器3和第二联轴器;所述第一联轴器3用于连接所述电机车从动轮2与所述第一编码器4;所述第二联轴器用于连接所述矿车从动轮与所述第二编码器。
33.在本实施例中,根据所述第二编码器采集的圈数确定打滑位置的具体公式为:
34.s = np;
35.其中,s为所述打滑位置,n为所述第二编码器采集的所述打滑位置处的圈数,p为所述第二编码器采集的圈数与米数之间的转换系数。
36.在本实施例中,所述第一编码器4和所述第二编码器的型号均为光电编码器 lf
‑
500bm
‑
c15f,所述第一联轴器3和所述第二联轴器的型号均为 bl
‑
3 ,所述 plc控制器的型号为6es7214
‑
1ag40
‑
0xb0。
37.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
38.本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

