方向盘传感器
发明领域
1.本发明涉及一种用于检测使用者的一只手或两只手和交通工具的方向盘之间的接触的装置或部件。特别地,本发明涉及一种应用于方向盘的装置或部件。
背景技术:
2.方向盘的正确抓握是驾驶安全的一个重要方面。因此,最近已经开发出了能够确定驾驶员是否把他/她的手放在方向盘上的系统。然而,接触的检测并不足以识别驾驶员正在抓握方向盘的方式。
3.实际上,了解接触是如何发生的以及驾驶员是否确实正在用正确的握法抓握方向盘是很重要的。
4.成功地获取此信息并非易事。特别是,要成功地获取驾驶员对方向盘的位置和抓握方式的准确信息并非易事。
5.因此,需要克服背景技术的局限性。
6.发明概述
7.本发明的一个目的是提供一种装置,其允许确定驾驶员的双手在交通工具的方向盘上的位置。
8.本发明的另一个目的是提供一种装置,其还允许确定方向盘的抓握方式。
9.借助一种用于检测使用者和交通工具的方向盘之间的接触的装置或部件,本发明实现了这样的目的以及根据本说明书将变得明显的其他目的中的至少一个,该装置包括:电绝缘支撑件;第一导电轨道(electrically conductive track),其紧固到支撑件并包括沿一方向与多个第一谷交替的多个第一峰;其中第一轨道被分布在支撑件上,使得适于与使用者的手接触的第一轨道的表面沿一方向减小。
10.值得注意的是,术语“接触”包括直接接触和间接接触,例如通过在轨道上的一层或更多层的间接接触。间接接触通常是在驾驶员身体的一个或更多个部位(例如,手)和作为传感器使用的一个或更多个导电轨道之间的电容耦合。在轨道上以及通常在装置上的覆盖层是例如由皮革制成的。
11.第一轨道有利地适于作为接触传感器操作,特别是当使用者的一只手或两只手触摸或接近方向盘时,例如当驾驶员触摸其下方设置有装置的方向盘的覆盖层(其可以例如由皮革制成)时。
12.第一轨道的特定分布有利地允许电子控制单元处理与导电轨道相关联的电量,例如电容。
13.特别地,电子控制单元可以读取并且可能地处理通过使用者的手与设置有根据本发明的装置的方向盘的接触而引起的电量的变化。更详细地,由于轨道的空间分布,可以确定手和方向盘之间接触的位置。例如,可以确定与手的接触是发生在方向盘的右手侧还是左手侧上。实际上,电量的绝对变化值根据接触发生的位置而变化,因为绝对值根据优选地间接地由手触摸的轨道的部分的表面延伸而变化。电量的最高变化值通常发生在适于与手
接触的第一轨道的表面最大的区域中。电量的变化值在沿方向d移动时逐渐地变低。
14.在第一特定实施例中,前面所述的第一轨道在支撑件上的分布使得适于与使用者的手接触的第一轨道的表面沿方向d减小借助于轨道获得,在该轨道中,峰的高度h1、h2沿所述方向d减小。
15.在第二特定实施例中,前面所述的轨道在支撑件上的分布使得适于与使用者的手接触的第一轨道的表面沿方向d减小借助于轨道获得,在该轨道中,第一轨道的宽度w1、w2沿所述方向d减小。
16.在第三特定实施例中,前面所述的轨道在支撑件上的分布使得适于与使用者的手接触的轨道的表面沿方向d减小借助于轨道获得,在该轨道中,峰的宽度a1、a2沿所述方向d增大。
17.在第四特定实施例中,前面所述的轨道在支撑件上的分布使得适于与使用者的手接触的轨道的表面沿方向d减小借助于轨道获得,在该轨道中,峰11之间的间隙d1、d2沿所述方向d增大。
18.根据有利方面,该装置还可以包括与第一轨道不同的第二导电轨道,第二导电轨道用作接触传感器。
19.第二轨道被有利地分布在支撑件上,使得适于与使用者的手接触的第二轨道的表面在相对于第一轨道的相反方向上沿前述方向增大。
20.因此,当适于与使用者的手接触的第一轨道的表面沿方向d并且更具体地在与方向d相同的方向上减小时,适于与使用者的手接触的第二轨道的表面增大。
21.由此,可以有利地辨别使用者的整个手是否抓握方向盘,即当他的/她的手优选地间接地触摸两个轨道时。例如,当在对于两个导电轨道中的每个导电轨道由手和两个导电轨道之间的接触引起的电量(例如,电容)的绝对变化值大于预设的阈值水平的情况之间出现“和(and)”时,根据逻辑关系,可以识别这种抓握情况。
22.因此,当还存在第二轨道时,该装置允许确定发生接触的位置和接触方式。
23.此外,该装置还允许检测使用者是否正在用两只手正确地抓握方向盘。
24.可选地,该装置还包括第三导电轨道,该第三导电轨道用作用于加热方向盘的加热轨道。
25.此外,该装置还可选地包括第四导电轨道,该第四导电轨道有利地用作屏蔽轨道,以避免在第一轨道(传感器轨道)和第三轨道(加热轨道)之间的干扰,特别是电容耦合或通常的电磁干扰,并当设置了第二轨道时避免在第二轨道和第三轨道之间的干扰,特别是电容耦合或通常的电磁干扰。
26.借助屏蔽轨道的特定布置,即在第一轨道和第三轨道之间和当设置了第二轨道时在第二轨道和第三轨道之间,获得屏蔽效果。
27.由此,可以确保借助电子控制单元在与屏蔽轨道相同的电位下放置第一轨道和第二轨道(当设置时),以便避免由于例如方向盘上的水滴而引起的错误触摸的检测。
28.第一轨道和第二轨道优选地被布置在相同的表面或层上。该装置所设置有的所有导电轨道优选地被布置在相同的表面或层上。
29.根据一个方面,本发明还包括交通工具的方向盘,方向盘设置有至少一个根据权利要求1至12中的任一项所述的装置。
30.根据某些非限制性实施例的详细描述,本发明的其他特征和优点将是更加明显的。
31.从属权利要求描述了本发明的特定实施例。
32.附图简述
33.在本发明的描述中参考了附图,这些附图通过非限制性示例的方式提供,其中:
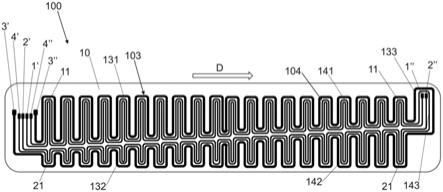
34.图1a示出了根据本发明的第一实施例的装置的俯视平面图;
35.图1b示出了图1a的放大细节;
36.图1c示出了图1a中的装置的两个部件的一部分的放大细节;
37.图1d示出了图1c的放大细节;
38.图1e示出了图1c的另一个放大细节;
39.图2a示出了根据本发明的第二实施例的装置的第一变体的俯视图;
40.图2b示出了图2a的放大细节;
41.图2c示出了图2a中的装置的两个部件的一部分的放大细节;
42.图2d示出了根据本发明的第二实施例的装置的第二变体的俯视平面图;
43.图3a示出了根据本发明的第三实施例的装置的俯视平面图;
44.图3b示出了根据本发明的第三实施例的装置的两个部件的一部分的俯视平面图;
45.图4示出了根据本发明的第四实施例的装置的俯视平面图;
46.图5a示意性地示出了根据本发明的方向盘的正面正视图;
47.图5b示出了根据第一实施例的装置的一部分的俯视平面图;
48.图5c示意性地示出了图5a中的方向盘的背面正视图;
49.图6a、图7a和图8a各自示出了图5a中所示的视图,其中示意性地示出了一个或多个接触区域;
50.图6b、图7b和图8b各自示出了图5b中所示的视图,其中示意性地示出了一个或多个接触区域;
51.图6c、图7c和图8c各自示出了图5c中所示的视图,其中示意性地示出了一个或多个接触区域。
52.发明的示例性实施例的详细描述
53.参考附图,描述了用于检测使用者的一只手或两只手和交通工具的方向盘之间的接触的装置100、200’、200”、300、400或部件的实施例。
54.在所有实施例中,装置100、200’、200”、300、400包括电绝缘支撑件10和紧固到支撑件10的导电轨道101、201、301、401(也称为“第一轨道”)。
55.轨道101、201、301、401适于用作接触传感器。
56.轨道101、201、301、401包括即其形状设定为包括沿方向d与多个谷12(或波谷)交替的多个峰11(或波峰)。换句话说,峰11和谷12彼此交替,由此在峰11之后有谷12,在谷12之后又有峰11。
57.轨道101、201、301、401有利地被分布在支撑件上,使得适于与使用者的手接触的轨道的表面沿方向d减小,例如对于装置100、200’、200”、300来说,在由附图中的箭头d表示的方向上减小,或者对于装置400来说,在与箭头d表示的方向的反方向上减小。优选地,方向d平行于装置100、200’、200”、300、400的纵向轴线。当装置被支撑在支撑平面上时,该装
置的纵向轴线是直线轴线。
58.优选地,适于与使用者的手接触的表面的这种减小是逐渐减小。
59.特别地,在图1a至图4中值得注意的是,在其中装置100、200’、200”、300、400被支撑在支撑平面上的情况下,示出了装置100、200’、200”、300、400及其部件。
60.如下所述,装置100、200’、200”、300、400是柔性的,因而它也可以具有其他形状,特别是当装置100、200’、200”、300、400被布置在交通工具的方向盘9上(例如围绕方向盘9布置)时。
61.还值得注意的是,支撑件10仅以示例的方式示出,应当理解,它也可以具有其他未示出的形状,特别是根据预期布置该装置的方向盘9来定。特别地参考附图1a至图1e,在第一实施例中,前面所述的轨道101在支撑件10上分布使得适于与使用者的手接触的轨道101的表面沿方向d减小(优选地逐渐减小)借助于轨道101来获得,在该轨道101中,峰11的高度h1、h2(图1c和图1d)例如在由箭头d表示的方向上沿所述方向d减小。
62.如已经提到的,轨道101适于用作接触传感器。出于此目的,轨道101包括两个端部部分。每个端部部分包括端部1’、1”(图1a),端部1’、1”用作用于连接到电子控制单元的焊盘(pad)(未示出)。
63.前述峰11和前述谷12在端部1’、1”之间特别是在前述端部部分之间延伸。
64.在由箭头d表示的方向上(图1d),沿方向d,峰11’的高度h1大于下一个峰11”的高度h2。
65.优选地,沿方向d,任意一个峰11的高度总是高于下一个峰11的高度。
66.峰11的高度优选地一个峰接着另一个峰逐渐地减小。优选地,任意一个峰11和下一个峰11之间的高度差是恒定值或基本上恒定的值。
67.优选地,任意一个峰11和下一个峰11之间的高度差在0.1mm和1mm之间的范围内。
68.优选地,靠近端部1’(在图1a中的最左边)的峰11的高度在70mm和100mm之间的范围内。优选地,靠近端部1’的峰11是相对于其他峰11具有最大高度的峰。
69.优选地,远离端部1’(在图1a中的最右边)的峰11的高度在5mm和20mm之间的范围内。优选地,远离端部1’的峰11是相对于其他峰11具有最小高度的峰。
70.峰11的高度h1、h2优选地对应于直线r1和直线r2、r3之间的最小距离,直线r1与峰11的顶部相切,直线r2、r3与紧挨着(相对于d方向)所述峰11(特别是紧挨着且邻近于所述峰11)的谷12的底部相切。
71.例如,在图1d中,峰11’的高度h1等于直线r1和直线r2之间的最小距离,其中直线r1与峰11’的顶部相切,直线r2与谷12’的底部相切。类似地,峰11’的高度h2等于直线r1和直线r3之间的最小距离,其中直线r1与峰11”的顶部相切,直线r3与谷12”的底部相切。
72.优选地,直线r1、r2、r3彼此平行。
73.优选地,直线r1与所有峰11的顶部相切,而直线r2和r3作为与其他谷12的底部相切的其他直线彼此分开并平行。
74.优选地,峰11的高度是相互平行的分段。
75.优选地,峰11的高度是垂直于方向d的分段。
76.优选地,峰11的顶部是弯曲的区段(stretches)。
77.优选地,轨道101的宽度“w”(图1c)是恒定的或基本上恒定的。
78.可替代地,第一轨道的宽度在与峰11的高度减小的方向相同的方向上沿所述方向d减小。
79.优选地,轨道101的宽度“w”在0.5mm和2mm之间。
80.优选地,峰11之间的间隙“d”沿方向d是恒定的或基本上恒定的。“间隙”是指在两个连续峰11之间的平行于方向d的最小距离。峰11之间的间隙“d”优选地在10mm和18mm之间。
81.所有峰11优选地具有相同的宽度“a”。“峰的宽度”是指在同一个峰11的两个相对的区段111、112之间的特别是平行于方向d的最小距离“a”。优选地,但非排他地,这些区段111、112彼此平行,并且还优选地垂直于方向d,如在所示的示例中。通常地,但非排他地,区段111、112通过峰的顶部彼此接合。
82.优选地,轨道101的总长度在4000mm和6000mm之间,此长度沿轨道101的整个路径测量。
83.装置100还优选地包括紧固到支撑件10的第二导电轨道102。第二轨道102不同于第一轨道101。
84.第二轨道102适于用作接触传感器。出于此目的,第二轨道102包括两个端部部分。每个端部部分包括端部2’、2”(图1a),端部2’、2”用作用于连接到电子控制单元的焊盘。
85.轨道101和轨道102优选地仅是适于用作接触传感器的轨道。
86.第二轨道102包括在端部2’、2”之间特别是在前述端部部分之间沿前述方向d与多个谷22交替的多个峰21。换句话说,峰21和谷22彼此交替,由此在峰21之后有谷22,在谷22之后又有峰21。
87.第一轨道101的峰11的数量优选地等于第二轨道102的峰21的数量。因此,第一轨道101的谷12的数量等于第二轨道102的谷22的数量。
88.第二轨道102被分布在支撑件10上,使得适于与使用者的手接触的第二轨道102的表面沿前述方向d特别是在由箭头d表示的方向上增大,优选地逐渐地增大。
89.特别地,沿方向d,峰21’的高度h3小于下一个峰21”(图1e)的高度h4。
90.沿方向d,任意一个峰21的高度优选地总是小于下一个峰21的高度。
91.峰21的高度优选地一个峰接着另一个峰逐渐地增大。
92.任意一个峰21和下一个峰21之间的高度差优选地是恒定值或基本上恒定的值。
93.一个峰21和下一个峰21之间的高度差优选地在0.1mm和1mm之间的范围内。
94.靠近端部2’(在图1a中的最左边)的峰21的高度优选地在5mm和20mm之间的范围内。靠近端部2’的峰21优选地是相对于其他峰21具有最小高度的峰。
95.远离端部2’(图1a中的最右边)的峰21的高度优选地在70mm和100mm之间的范围内。远离端部2’的峰21优选地是相对于其他峰21具有最大高度的峰。
96.峰21的高度h3、h4优选地对应于直线r4与直线r5、r6之间的最小距离,直线r4与峰21的底部相切,直线r5、r6与紧挨着(相对于方向d)所述峰21(特别是紧挨着且邻近所述峰21)的谷22的顶部相切。
97.例如,在图1e中,峰21’的高度h3等于直线r4和直线r5之间的最小距离,其中直线r4与峰21’的底部相切,直线r5与谷22’的顶部相切。类似地,峰21”的高度h4等于直线r4和直线r6之间的最小距离,其中直线r4与峰21”的底部相切,直线r6与谷22”的顶部相切。
98.直线r4、r5、r6优选地彼此平行。
99.直线r4优选地与所有峰21的底部相切,而直线r4和r5作为与其他谷22的顶部相切的其他直线彼此不同且平行。
100.峰21的高度优选地是相互平行的分段。
101.峰21的高度优选地是垂直于方向d的分段。
102.峰21的底部优选地是弯曲的区段。
103.轨道102的宽度“w”是恒定的或基本上恒定的。
104.可替代地,第二轨道的宽度在与峰21的高度增大的方向相同的方向上沿所述方向d增大。
105.轨道102的宽度“w”优选地在0.5mm和2mm之间。
106.第二轨道102的宽度“w”优选地等于第一轨道101的宽度。
107.峰21之间的间隙“d”优选地是沿方向d恒定的或基本上恒定的。峰21之间的间隙优选地在10mm和18mm之间。
108.峰21之间的间隙优选地等于峰11之间的间隙。
109.峰21优选地全部具有相同的宽度“a”,其优选地等于第一轨道101的峰11的宽度。
110.第一轨道101的每个峰11优选地与第二轨道102的相应峰21对准,特别是沿与方向d正交的轴线对准。
111.如在图1a中所示的示例中,第一轨道101的峰11和第二轨道102的峰21优选地在相互相反的方向上,特别是在高度上,优选地沿横向于(优选地垂直于)方向d的相应方向延伸。
112.峰21的底部优选地是弯曲的区段。
113.第一轨道101的每个峰11的顶部优选地朝向第二轨道102的与该峰11对准的相应峰21的底部的凹面是凹形的。
114.第一轨道101和第二轨道102优选地成形为使得对于所有成对的峰11
‑
21,在峰11的顶部和与所述峰21对准的峰21的底部之间的垂直于方向d的最小距离“k”(图1c)是相等的。
115.第二轨道102的总长度优选地在4000mm和6000mm之间,此长度沿轨道102的整个路径测量。
116.第二轨道102的总长度优选地等于或大约等于第一轨道101的总长度。
117.装置100还可选地包括紧固到支撑件10的第三导电轨道103(图1a至图1b)。
118.第三轨道103适于用作加热轨道。
119.第三轨道103包括第一区段131,第一区段131平行于或基本上平行于第一轨道101延伸。
120.特别地,第三轨道103的第一区段131包括多个峰和谷,该多个峰和谷平行于或基本上平行于第一轨道101的峰11和谷12延伸。
121.另外,第三轨道103的第一区段131的峰的高度优选地在与第一轨道101的峰11的高度减小的方向相同的方向上沿方向d减小。
122.第一区段131的峰和谷的数量优选地等于第一轨道101的峰11和谷12的数量。
123.当还设置了第二轨道102时,第三轨道103还优选地包括第二区段132,第二区段
132平行于或基本上平行于第二轨道102延伸。
124.特别地,第三轨道103的第二区段132包括多个峰和谷,该多个峰和谷平行于或基本上平行于第二轨道102的峰21和谷22延伸。
125.另外,第三轨道103的第二区段132的峰的高度优选地在与第二轨道102的峰21的高度增大的方向相同的方向上沿方向d增大。
126.第二区段132的峰和谷的数量优选地等于第二轨道102的峰21和谷22的数量。
127.第三轨道103的第一区段131和第二区段132通过联合区段133彼此接合。
128.第三轨道103包括两个端部部分,优选地仅两个端部部分,其每个设置有两个端部3’、3”,端部3’、3”用作用于连接到电子控制单元的焊盘。
129.第三轨道103的宽度优选地大于第一轨道101的宽度“w”以及第二轨道102的宽度“w”。
130.第三轨道103的宽度优选地是恒定的或基本上恒定的。
131.第三轨道103的宽度优选地在0.5mm和4mm之间。
132.第三轨道103的第一区段131和第一轨道101之间的距离,特别是最小距离优选地在2.5mm和4mm之间,该距离优选地是恒定的或基本上恒定的。
133.第三轨道103的第二区段132和第二轨道102之间的距离,特别是最小距离优选地在2.5mm和4mm之间,该距离优选地是恒定的或基本上恒定的。
134.第三轨道103优选地靠近装置100的外围或轮廓,特别是靠近支撑件10的外围,并且第一轨道101和第二轨道102(当设置时)相对于装置100的外围是在远侧的,特别是远离支撑件10的外围。可替代地,在未示出的变体中,第一轨道和第二轨道(当设置时)可选地靠近该装置的外围,特别是靠近绝缘支撑件的外围,并且第三轨道远离该装置的外围或轮廓,特别是相对于绝缘支撑件的外围。
135.装置100还优选地包括紧固到支撑件10的第四导电轨道104。
136.第四轨道104用作屏蔽轨道,以避免通常在第一轨道101和第三轨道103之间且当设置了第二轨道102时在第二轨道102和第三轨道103之间的干扰,特别是电容耦合或电磁干扰。
137.第四轨道104包括在第一轨道101和第三轨道103之间延伸的第一区段141。
138.第四轨道104的第一区段141优选地平行于或基本上平行于第一轨道101和第三轨道103延伸。
139.特别地,第四轨道104的第一区段141包括多个峰和谷,该多个峰和谷平行于或基本上平行于第一轨道101的峰11和谷12延伸。
140.另外,第四轨道104的第一区段141的峰的高度优选地在与第一轨道101的峰11的高度减小的方向相同的方向上沿方向d减小。
141.第一区段141的峰和谷的数量优选地等于第一轨道101的峰11和谷12的数量。
142.当还设置了第二轨道102时,第四轨道104还优选地包括在第二轨道102和第三轨道103之间延伸的第二区段142。
143.第四轨道104的第二区段142优选地平行于或基本上平行于第二轨道102延伸。
144.特别地,第四轨道104的第二区段142包括多个峰和谷,该多个峰和谷平行于或基本上平行于第二轨道102的峰21和谷22延伸。
145.另外,第四轨道104的第二区段142的峰的高度优选地在与第二轨道102的峰21的高度增大的方向相同的方向上沿方向d增大。
146.第二区段142的峰和谷的数量优选地等于第二轨道102的峰11和谷12的数量。
147.第四轨道104的第一区段141和第二区段142通过联合区段143彼此接合。
148.第四轨道104包括两个端部部分,优选地仅两个端部部分,其每个设置有两个端部4’、4”,端部4’、4”用作用于连接到电子控制单元的焊盘。
149.第四轨道104的宽度优选地是恒定的或基本上恒定的。
150.第四轨道104的宽度优选地在0.5mm和2mm之间。
151.第四轨道104的宽度优选地等于或大约等于第一轨道101的宽度。
152.第四轨道104的第一区段141优选地与第一轨道101和第三轨道103等距地间隔开或大约等距地间隔开,并且第四轨道104的第二区段142与第二轨道102和第三轨道103等距地间隔开或大约等距地间隔开。
153.特别地参考图2a至图2d,在装置200’、200”的第二实施例中,前面所述的轨道在支撑件上分布使得适于与使用者的手接触的轨道的表面沿方向d减小借助于轨道201来获得,在轨道201中,第一轨道201的宽度w1、w2(图2c)例如在由箭头d表示的方向上沿所述方向d减小。
154.在所有实施例中,轨道的宽度是指平行于支撑件10的表面并垂直于轨道的轴线进行的测量。相反,轨道的厚度是指垂直于支撑件10的表面并垂直于轨道的轴线进行的测量。
155.如已经提到的,轨道201适于用作接触传感器。出于此目的,轨道201包括两个端部部分。每个端部部分包括端部1’、1”(图2a),端部1’、1”用作用于连接到电子控制单元的焊盘(未示出)。
156.前述峰11和前述谷12在端部1’、1”之间,特别是在前述端部部分之间延伸。
157.更详细地,轨道201的宽度的前述减小是沿轨道201的路径,即沿轨道201的实际长度。
158.轨道201的宽度的减小优选地是逐渐的。
159.仅通过示例的方式,宽度的减小可以在一个区段接着一个区段地发生,任何一个区段总是具有比下一个区段的恒定宽度更大的恒定宽度,特别是在由箭头表示的方向d的方向上。
160.对于每个区段,轨道的宽度优选地,但非排他地,减小1%至2.5%。
161.轨道201的宽度优选地减小恒定的值。
162.仅通过示例的方式,具有恒定的或基本上恒定的宽度的每个区段可以由峰11和下一个谷12形成,特别是由峰11的直线区段111的起点到下一个峰11的直线区段111的起点形成。
163.例如,特别地参考图2c,由第一峰11
’‑
谷12’对形成的轨道201的第一区段的宽度具有宽度“w1”;并且由第二峰11
”‑
谷12”对形成的与第一区段相邻或接近的轨道201的第二区段的宽度具有宽度“w2”(图2c中部分地示出了谷12”)。宽度w2相对于宽度w1小1%至2.5%,例如小大约1%。
164.可替代地,仅通过示例的方式,宽度的减小还可以在同一个峰的区段111和区段112之间发生。特别地,区段112可以相对于下一个峰的区段111具有更小的宽度,并且相对
于下一个峰的区段111具有更大的宽度,等等。
165.峰11优选地具有相同的宽度“a”。“峰的宽度”是指在同一个峰11的两个相对的区段111、112之间的特别是平行于方向d的最小距离“a”。优选地,但是非排他地,这种区段111、112彼此平行,并且还优选地垂直于方向d,如在所示的示例中。通常地,但是非排他地,区段111、112通过峰的顶部彼此接合。
166.峰11的高度优选地是恒定的或基本上恒定的,即对于所有峰11,优选的是具有相同的高度。可替代地,峰11的高度可以基本上如第一实施例中所述的那样在与轨道201的宽度减小的方向相同的方向上减小。
167.峰11的高度优选地在30mm和60mm之间。
168.轨道201的总长度优选地在4000mm和6000mm之间,该长度沿轨道201的整个路径测量。
169.峰11之间的间隙“d”优选地是沿方向d恒定的或基本上恒定的。换句话说,任何成对的连续峰11之间的间隙是恒定值或基本上恒定的值。“间隙”是指在两个连续峰11之间的平行于方向d的最小距离。峰11之间的间隙优选地在10mm和18mm之间。
170.装置200’、200”还优选地包括紧固到支撑件10的第二导电轨道202’、202”。第二轨道202’、202”不同于第一轨道201。
171.第二轨道202’、202”适于用作接触传感器。出于此目的,第二轨道202’、202”包括两个端部部分。每个端部部分包括端部2’、2”,其用作用于连接到电子控制单元的焊盘。
172.轨道201和轨道202’、202”优选地仅是适于用作接触传感器的轨道。
173.第二轨道202’、202”包括在端部2’、2”之间特别是在前述端部部分之间沿前述方向d与多个谷22交替的多个峰21。换句话说,峰21和谷22彼此交替,因而在峰21之后有谷22,在谷22之后又有峰21。
174.第一轨道201的峰11的数量优选地等于第二轨道202’、202”的峰21的数量。因此,第一轨道201的谷21的数量等于第二轨道202’、202”的谷22的数量。
175.第二轨道202’、202”被分布在支撑件10上,使得适于与使用者的手接触的第二轨道202’、202”的表面沿前述方向d增大。
176.特别地,第二轨道轨道202’、202”的宽度w3、w4在由箭头表示的方向上,沿所述方向d增大。
177.更详细地,轨道202’、202”的宽度的前述增大是沿轨道202的路径,即沿轨道202的实际长度。
178.轨道202’、202”的宽度的增大优选地是逐渐的。
179.仅通过示例的方式,宽度的增大可以一个区段接着一个区段地发生,即在由箭头表示的方向d的方向上,任何一个区段总是具有比下一个区段的恒定宽度更小的恒定宽度。
180.对于每个区段,轨道202’、202”的宽度优选地,但非排他地,增加1%至2.5%。
181.轨道202’、202”的宽度优选地增加恒定值。
182.仅通过示例的方式,具有恒定或基本上恒定的宽度的每个区段可以由峰21’和下一个谷22’形成。
183.例如,由第一峰21
’‑
谷22’对形成的轨道202’、202”的第一区段的宽度具有宽度“w3”;并且由第二峰21
”‑
谷22”对形成的与第一区段连续的轨道202’、202”的第二区段的宽
度具有宽度“w4”(图1c中部分地示出了谷22”)。宽度w4相对于宽度w3大1%至2.5%,例如大大约1%。
184.可替代地,仅通过示例的方式,宽度的增大也可以在同一个峰的区段111和区段112之间发生。特别地,区段112可以相对于同一个峰的区段111具有更大的宽度,并且相对于下一个峰的区段111具有更小的宽度,依此类推。
185.轨道202’、202”的宽度增大的方式优选地类似于轨道201的宽度减小的方式。
186.第二轨道202’、202”的总长度优选地在4000mm和6000mm之间,此长度沿轨道202’、202”的整个路径测量。第二轨道202’、202”的总长度优选地等于或大约等于第一轨道201的总长度。
187.峰21优选地具有相同的宽度“a”,该宽度“a”优选地等于第一轨道201的峰11的宽度。
188.峰21的高度优选地是恒定的或基本上恒定的,即对于所有峰11,优选的是具有相同的高度。可替代地,峰21的高度可以在与第二轨道的宽度增大的方向相同的方向上增大。
189.第二轨道202’、202”的峰21的高度优选地等于或大约等于第一轨道201的峰11的高度。
190.峰21的高度优选地在30mm和60mm之间。
191.任何成对的连续峰21之间的间隙优选地是恒定值或基本上恒定的值。
192.峰21之间的间隙优选地具有在10mm和18mm之间的延伸。
193.峰21之间的间隙优选地等于峰11之间的间隙d。第一轨道201的每个峰11优选地与第二轨道202’、202”的相应峰21对准,特别是沿与方向d垂直的轴线对准。
194.在第二实施例的第一变体(图2a、2b、2c)中,第一轨道101的峰11和第二轨道202’的峰21优选地在相互相反的方向上,特别是在高度上,优选地沿横向于(优选地垂直于)方向d的相应方向延伸。
195.在第一变体中,第一轨道201和第二轨道202’优选地成形为对于所有成对的峰11
‑
21来说,在峰11的顶部和与所述峰11对准的峰21的底部之间的垂直于方向d的最小距离“k”(图1c)是相等的。
196.在第二实施例的第二变体(图2d)中,第一轨道201的峰11和第二轨道202”的峰21在相同的方向上延伸。第二轨道202”优选地平行于或基本上平行于第一轨道201延伸。
197.在两个变体中,装置200’、200”还可选地包括紧固到支撑件10的第三导电轨道203。
198.第三轨道203适于用作加热轨道。
199.第三轨道203包括第一区段231,第一区段231平行于或基本上平行于第一轨道201延伸。
200.特别地,第三轨道203的第一区段231包括多个峰和谷,该多个峰和谷平行于或基本上平行于第一轨道201的峰11和谷12延伸。
201.第一区段231的峰和谷的数量优选地等于第一轨道201的峰11和谷12的数量。
202.当设置了第二轨道202’、202”时,在两个变体中,第三轨道203包括第二区段232,第二区段232平行于或基本上平行于第二轨道202’、202”延伸。
203.特别地,第三轨道203的第二区段232包括多个峰和谷,该多个峰和谷平行于或基
本上平行于第二轨道202’、202”的峰21和谷22延伸。
204.第二区段232的峰和谷的数量优选地等于第二轨道202’、202”的峰21和谷22的数量。
205.第三轨道203的第一区段231和第二区段232通过联合区段233彼此接合。
206.第三轨道203包括两个端部部分,优选地仅包括两个端部部分,其每个设置有两个端部3’、3”,端部3’、3”用作用于连接到电子控制单元的焊盘。
207.第三轨道203的宽度优选地大于第一轨道201的最大宽度,并且比第二轨道202’、202”的最大宽度大。
208.第三轨道203的宽度优选地是恒定的或基本上恒定的。
209.第三轨道203的宽度优选地在0.5mm和4mm之间。
210.第三轨道203的第一区段231和第一轨道201之间的距离,特别是最小距离优选地在0.7mm和3mm之间,该距离优选地是恒定的或基本上恒定的。
211.第三轨道203的第二区段232和第二轨道202’、202”之间的距离,特别是最小距离优选地在0.7mm和3mm之间,该距离优选地是恒定的或基本上恒定的。
212.第三轨道203优选地靠近装置200’、200”的外围或轮廓,特别是靠近支撑件10的外围,并且第一轨道201和第二轨道202’、202”(当设置了第二轨道202’、202”时)相对于装置200’、200”的外围是在远侧的,特别是在支撑件10的外围的远侧。可替代地,在未示出的变体中,第一轨道和第二轨道(当设置时)可选地靠近该装置的外围,特别是靠近绝缘支撑件的外围,并且第三轨道远离该装置的外围或轮廓,特别是相对于绝缘支撑件的外围是在远侧的。
213.装置200’、200”还优选地包括紧固到支撑件10的第四导电轨道204。
214.第四轨道204用作屏蔽轨道,以避免在第一轨道201和第三轨道203之间的干扰,特别是电容耦合或通常的电磁干扰,并且当设置了第二轨道202’、202”时,避免在第二轨道202’、202”和第三轨道203之间的干扰,特别是电容耦合或通常的电磁干扰。
215.第四轨道204包括第一区段241,第一区段241在第一轨道201和第三轨道203之间延伸。
216.第四轨道204的第一区段241优选地平行于或基本上平行于第一轨道201和第三轨道203延伸。
217.特别地,第四轨道204的第一区段241包括多个峰和谷,该多个峰和谷平行于或基本上平行于第一轨道201的峰11和谷12延伸。
218.第一区段241的峰和谷的数量优选地等于第一轨道201的峰11和谷12的数量。
219.当还设置了第二轨道202’、202”时,第四轨道204还优选地包括第二区段242,第二区段242在第二轨道202’、202”和第三轨道203之间延伸。
220.第四轨道204的第二区段242优选地平行于或基本上平行于第二轨道202’、202”延伸。
221.特别地,第四轨道204的第二区段242包括多个峰和谷,该多个峰和谷平行于或基本上平行于第二轨道202’、202”的峰21和谷22延伸。
222.第二区段242的峰和谷的数量优选地等于第二轨道202的峰21和谷22的数量。
223.在第二变体中,轨道的顺序(例如平行于方向d的顺序)优选地如下:第三轨道203、
第四轨道204、第一轨道201、第二轨道202”、第四轨道204、第三轨道203。
224.第四轨道204的第一区段241和第二区段242通过联合区段243彼此接合。
225.第四轨道204包括两个端部部分,优选地仅包括两个端部部分,其每个设置有两个端部4’、4”,端部4’、4”用作用于连接到电子控制单元的焊盘。
226.第四轨道204的宽度优选地是恒定的或基本上恒定的。
227.第四轨道204的宽度优选地在0.5mm和2mm。
228.第四轨道204的宽度优选地等于或大约等于第一轨道201的宽度。
229.第四轨道204的峰的高度优选地是恒定的或基本上恒定的。
230.第四轨道204的峰的高度优选地在30mm和60mm之间,或在31mm和63mm之间。
231.第四轨道204的第一区段241优选地与第一轨道201和第三轨道203等距地间隔开或大约等距地间隔开,并且第四轨道204的第二区段241与第二轨道202’、202”和第三轨道203等距地间隔开或大约等距地间隔开。
232.特别地参考图3a和图3b,在装置300的第三实施例中,前面所述的轨道在绝缘支撑件10上分布使得适于与使用者的手接触的轨道的表面沿方向d减小借助于轨道301来获得,在该轨道301中,峰11的宽度a1、a2沿所述方向d增大。特别地,在图3a和图3b中,适于与使用者的手接触的第一轨道301的表面在由箭头表示的方向上,沿方向d减小。实际上,轨道301在由箭头表示的方向上变得稀疏,并且因此减小可用的表面,而该轨道在与由箭头表示的方向相反的方向上变得稠密,并且因此增大可用的表面。
233.如已经提到的,轨道301适于用作接触传感器。出于此目的,轨道301包括两个端部部分。每个端部部分包括端部1’、1”(图3a),端部1’、1”用作用于连接到电子控制单元的焊盘(未示出)。
234.前述峰11和前述谷12在端部1’、1”之间,特别是在前述端部部分之间延伸。
[0235]“峰的宽度”是指在相同峰11的两个相对的区段111、112之间的最小距离,特别是平行于方向d的最小距离(在图3b中,a1、a2)。优选地,但非排他地,这些区段111、112彼此平行,并且还优选地垂直于方向d,如在所示的示例中。通常地,但非排他地,区段111、112通过峰的顶部彼此接合。
[0236]
优选地,峰11的宽度优选地在图3a和图3b中的箭头表示的方向上,沿方向d一个峰接着一个峰逐渐地增大。特别地,在图3a和图3b中箭头表示的方向上,沿方向d,每个峰11优选地具有比下一个峰11的宽度更小的宽度。
[0237]
例如,在图3b中,峰11’的宽度由“a1”表示,并且下一个峰11”的宽度由“a2”表示。宽度a1小于宽度a2。
[0238]
任意一个峰11和下一个峰11之间的宽度差,例如,宽度a2和宽度a1之间的差,优选地在0.5mm和4mm之间的范围内,并且优选地是恒定值。
[0239]
靠近端部1’(在图3a中的最左边)的峰11的宽度优选地在0.5mm和4mm之间的范围内。靠近端部1’的峰11优选地是相对于其他峰11具有最小宽度的峰。
[0240]
远离端部1’(在图3a中的最右边)的峰11的宽度优选地在3.5mm和28mm之间的范围内。远离端部1’(且靠近端部1”)的峰11优选地是相对于其他成对的峰11具有最大宽度的峰。
[0241]
任何一对连续峰11之间的间隙d优选地是恒定值。“间隙”是指在两个连续峰11之
间的平行于方向d的最小距离。峰11之间的间隙“d”优选地在15mm和20mm之间,或在10mm和18mm之间。
[0242]
峰11的高度优选地是恒定的或基本上恒定的,即对于所有峰11,优选的是具有相同的高度。
[0243]
峰11的高度优选地在30mm和60mm之间。
[0244]
轨道301的宽度“w”优选地是恒定的或基本上恒定的。轨道301的宽度优选地在0.5mm和2mm之间。
[0245]
轨道301的总长度优选地在4000mm和6000mm之间,此长度沿轨道301的整个路径测量。
[0246]
装置300还优选地包括紧固到支撑件10的第二导电轨道302。第二轨道302不同于第一轨道301。
[0247]
第二轨道302适于用作接触传感器。出于此目的,轨道302包括两个端部部分。每个端部部分包括端部2’、2”,端部2’、2”用作用于连接到电子控制单元的焊盘。
[0248]
轨道301和轨道302优选地仅是适于用作接触传感器的轨道。
[0249]
第二轨道302包括在端部2’、2”之间特别是在前述端部部分之间沿前述方向d与多个谷22交替的多个峰21。换句话说,峰21和谷22彼此交替,因而在峰21之后有谷22,在谷22之后又有峰21。
[0250]
峰21的宽度优选地在图3a和图3b中箭头表示的方向上沿方向d一个峰接着一个峰逐渐地减小。特别地,在图3a和图3b中箭头表示的方向上,沿方向d,每个峰21优选地具有比下一个峰21的宽度更大的宽度。
[0251]
例如,在图3b中,峰21’的宽度由“a3”表示,并且下一个峰21”的宽度由“a4”表示。宽度a3大于宽度a4。
[0252]
任意一个峰21和下一个峰21之间的宽度差,例如,宽度a3和宽度a4之间的差,优选地在0.5mm和4mm之间的范围内,并且优选地是恒定值。
[0253]
靠近端部1’(在图3a中的最左边)的峰21的宽度优选地在3.5mm和28mm之间的范围内。靠近端部1’(且远离端部1”)的峰21优选地是相对于其他峰21具有最大宽度的峰21。
[0254]
远离端部1’(在图3a中的最右边)的峰21的宽度优选地在0.5mm和4mm之间的范围内。远离端部1’的峰21优选地是相对于其他峰21具有最小宽度的峰21。
[0255]
任何一对连续峰11之间的间隙“d”优选地是恒定值,并且优选地等于第一轨道301的峰11之间的间隙。
[0256]
峰21的高度优选地是恒定的或基本上恒定的,即优选的是所有峰21具有相同的高度。
[0257]
第二轨道302的峰21的高度优选地等于或大约等于第一轨道301的峰11的高度。
[0258]
峰21的高度优选地在30mm和60mm之间。
[0259]
轨道302的宽度优选地是恒定的或基本上恒定的。
[0260]
轨道302的宽度优选地等于轨道301的宽度w。
[0261]
轨道302的宽度优选地在0.5mm和2mm之间。
[0262]
轨道302的总长度优选地在4000mm和6000mm之间,此长度沿轨道302的整个路径测量。
[0263]
第二轨道302的长度优选地等于第一轨道301的长度。
[0264]
如图3a、图3b中所示,第一轨道301的峰11和第二轨道302的峰21优选地在相互相反的方向上,特别是在高度上,优选地沿垂直于方向d的相应方向延伸。
[0265]
另外,在第三实施例中,该装置可选地包括紧固到绝缘支撑件10的第三导电轨道303。
[0266]
第三轨道303适于用作加热轨道。
[0267]
第三轨道303包括第一区段331,第一区段331平行于或基本上平行于第一轨道301延伸。
[0268]
特别地,第三轨道303的第一区段331包括多个峰和谷,该多个峰和谷平行于或基本上平行于第一轨道301的峰11和谷12延伸。
[0269]
第三轨道303的第一区段331的各个峰之间的间隙优选地是沿方向d恒定的或基本上恒定的。可替代地,第一区段331的各个峰之间的间隙在峰11的宽度增大的方向上减小。
[0270]
第一区段331的峰和谷的数量优选地等于第一轨道301的峰11和谷12的数量。
[0271]
当还设置了第二轨道302时,第三轨道303包括第二区段332,第二区段332平行于或基本上平行于第二轨道302延伸。特别地,第三轨道303的第二区段332包括多个峰和谷,该多个峰和谷平行于或基本上平行于第二轨道302的峰21和谷22延伸。
[0272]
第三轨道303的第二区段332的各个峰之间的间隙优选地是沿方向d恒定的或基本上恒定的。可替代地,第二区段332的各个峰之间的间隙在其中峰11的宽度增大的方向上减小。
[0273]
第二区段332的峰和谷的数量优选地等于第二轨道302的峰21和谷22的数量。
[0274]
第三轨道303的第一区段331和第二区段332通过联合区段333彼此接合。
[0275]
第三轨道303包括两个端部部分,优选地仅包括两个端部部分,其每个设置有两个端部3’、3”,端部3’、3”用作用于连接到电子控制单元的焊盘。
[0276]
第三轨道303的宽度优选地大于第一轨道301的宽度,并比第二轨道302的宽度大。
[0277]
第三轨道303的宽度优选地是恒定的或基本上恒定的。
[0278]
第三轨道303的宽度优选地在0.5mm和4mm之间。
[0279]
第三轨道303的第一区段331和第一轨道301之间的距离,特别是最小距离优选地在0.7mm和2.2mm之间,该距离优选地是恒定的或基本上恒定的。
[0280]
第三轨道303的第二区段332和第二轨道302之间的距离,特别是最小距离优选地在0.7mm和2.2mm之间,该距离优选地是恒定的或基本上恒定的。
[0281]
第三轨道303优选地靠近装置300的外围或轮廓,特别是靠近支撑件10的外围,并且第一轨道301和第二轨道302(当设置时)相对于装置300的外围是在远侧的,特别是在支撑件10的外围的远侧。可替代地,在未示出的变体中,第一轨道和第二轨道(当设置时)可选地靠近该装置的外围,特别是靠近绝缘支撑件的外围,并且第三轨道远离该装置的外围或轮廓,特别是相对于绝缘支撑件的外围是在远侧的。
[0282]
装置300还优选地包括紧固到支撑件10的第四导电轨道304。
[0283]
第四轨道304用作屏蔽轨道,以避免在第一轨道301和第三轨道303之间以及当设置了第二轨道302时在第二轨道302和第三轨道303之间的干扰,特别是电容耦合或通常的电磁干扰。
[0284]
第四轨道304包括第一区段341,第一区段341在第一轨道301和第三轨道303之间延伸。
[0285]
第四轨道304的第一区段341优选地平行于或基本上平行于第一轨道301和第三轨道303延伸。
[0286]
特别地,第四轨道304的第一区段341包括多个峰和谷,该多个峰和谷平行于或基本上平行于第一轨道301的峰11和谷12延伸。
[0287]
第一区段341的峰和谷的数量优选地等于第一轨道301的峰11和谷12的数量。
[0288]
第四轨道304的第一区段341的峰之间的间隙优选地是沿方向d恒定的。
[0289]
当还设置了第二轨道302时,第四轨道304包括第二区段342,第二区段342在第二轨道302和第三轨道303之间延伸。
[0290]
第四轨道304的第二区段342优选地平行于或基本上平行于第二轨道302延伸。
[0291]
特别地,第四轨道304的第二区段342包括多个峰和谷,该多个峰和谷平行于或基本上平行于第二轨道302的峰21和谷22延伸。
[0292]
第四轨道304的第二区段342的峰之间的间隙优选地是沿方向d恒定的。
[0293]
第二区段342的峰和谷的数量优选地等于第二轨道302的峰21和谷22的数量。
[0294]
第四轨道304的第一区段341和第二区段342通过联合区段343彼此接合。
[0295]
第四轨道304包括两个端部部分,优选地仅两个端部部分,其每个设置有两个端部4’、4”,端部4’、4”用作用于连接到电子控制单元的焊盘。
[0296]
第四轨道304的宽度优选地是恒定的或基本上恒定的。
[0297]
第四轨道304的宽度优选地在0.5mm和2mm之间。
[0298]
第四轨道304的宽度优选地等于或大约等于第一轨道301的宽度。
[0299]
第四轨道304的第一区段341优选地与第一轨道301和第三轨道303等距地间隔开或大约等距地间隔开,并且第四轨道304的第二区段342与第二轨道302和第三轨道303等距地间隔开或大约等距地间隔开。
[0300]
特别地参考图4,在装置400的第四实施例中,前面所述的轨道在绝缘支撑件10上分布使得适于与使用者的手接触的轨道的表面沿方向d减小借助轨道401来获得,在轨道401中,峰11之间的间隙d1、d2沿所述方向d减小。特别地,在图4中,适于与使用者的手接触的轨道401的表面在相对于由箭头表示的方向相反方的向上,沿方向d减小。实际上,第一轨道401在由箭头表示的方向上变得稠密并且因此增大可用的表面,而相反地它在相反方向上变得稀疏并且因此减小可用的表面。
[0301]
如已经提到的,轨道401适于用作接触传感器。出于此目的,轨道401包括两个端部部分。每个端部部分包括端部1’、1”(图4),端部1’、1”用作用于连接到电子控制单元的焊盘(未示出)。
[0302]
前述峰11和前述谷12在端部1’、1”之间,特别是在前述端部部分之间延伸。
[0303]
术语“间隙”d1、d2、d3、d4是指在两个连续峰11之间的平行于方向d的最小距离。
[0304]
优选地,对于每对峰11,峰11之间的间隙在图4中箭头表示的方向上沿方向d逐渐地减小。特别地,优选地,每对峰11相对于下一对峰11在图4中箭头表示的方向上沿方向d具有更大的间隙。
[0305]
例如,在图4中,第一对峰11
’‑
11”之间的间隙由“d1”表示,并且下一对峰11
”‑
11
”’
之间的间隙由“d2”表示。间隙d1大于间隙d2。
[0306]
任何一对峰和下一对峰之间的间隙差,例如间隙d2和间隙d1之间的差,优选地在0.5mm和1mm之间的范围内。
[0307]
对于所有对的峰11,任何一对峰(例如,对11
’‑
11”)和下一对峰(例如,对11
”‑
11
”’
)之间的间隙差优选地是相等的。
[0308]
靠近端部1’(在图4中的最左边)的一对峰11的间隙优选地在25mm和30mm之间。靠近端部1’(且远离端部1”)的一对峰11优选地是相对于其他对的峰11具有最大间隙的一对峰。
[0309]
远离端部1’(在图3a中的最右边)的各对峰11的间隙优选地在0.5mm和1mm之间。远离端部1’的一对峰11优选地是相对于其他对的峰11具有最小间隙的一对峰。
[0310]
峰11的高度优选地是恒定的或基本上恒定的,即对于所有峰11,优选的是具有相同的高度。
[0311]
峰11的高度优选地在30mm和60mm之间。
[0312]
轨道401的宽度优选地是恒定的或基本上恒定的。轨道401的宽度优选地是在0.5mm和2mm之间。
[0313]
峰11优选地具有相同的宽度“a”。“峰的宽度”是指在同一个峰11的两个相对的区段111、112之间的特别是平行于方向d的最小距离“a”。优选地,但非排他地,这些区段111、112彼此平行,并且还优选地垂直于方向d,如在未示出的示例中。通常地,但非排他地,区段111、112通过峰的顶部彼此接合。
[0314]
轨道401的总长度优选地在4000mm和6000mm之间,该长度沿轨道401的整个路径测量。
[0315]
装置400还优选地包括紧固到支撑件10的第二导电轨道402。第二轨道402与第一轨道401分开。第二轨道402适于用作接触传感器。出于此目的,轨道402包括两个端部部分。每个端部部分包括端部2’、2”,端部2’、2”用作用于连接到电子控制单元的焊盘。
[0316]
轨道401和轨道402优选地仅是适于用作接触传感器的轨道。
[0317]
第二轨道402包括在端部2’、2”之间特别是在前述端部部分之间沿前述方向d与多个谷22交替的多个峰21。换句话说,峰21和谷22彼此交替,因而在峰21之后有谷22,在谷22之后又有峰21。
[0318]
对于每对峰21,峰21之间的间隙优选地在图4中箭头表示的方向上沿方向d逐渐地增大。特别地,每对峰21优选地相对于下一对峰21在图4中箭头表示的方向上沿方向d具有更小的间隙。
[0319]
例如,在图4中,第一对峰21
’‑
21”之间的间隙由“d3”表示,并且下一对峰21
”‑
21
’”
之间的间隙由“d4”表示。间隙d3小于间隙d4。
[0320]
任何一对峰21和下一对峰21之间的间隙差优选地在0.5mm和1mm之间的范围内。
[0321]
对于所有对的峰21,一对峰21和下一对峰21之间的间隙差优选地是相等的。
[0322]
任何一对峰21和下一对峰21之间的间隙差优选地等于第一轨道401的任何一对峰11和下一对峰11之间的间隙差。
[0323]
靠近端部1’(在图4中的最左边)的一对峰21的间隙优选地在25mm和30mm之间的范围内。靠近端部1’的一对峰21优选地是相对于其他峰21具有最小间隙的一对峰。
[0324]
远离端部1’(在图4中的最右边)的成对的峰21的间隙优选地在0.5mm和1mm之间的范围内。远离端部1’(且靠近端部1”)的一对峰21优选地是相对于其他对的峰21具有最大间隙的一对峰。
[0325]
峰21优选地具有相同的宽度“a”,该宽度“a”优选地等于第一轨道401的峰11的宽度。
[0326]
峰21的高度优选地是恒定的或基本上恒定的,即对于所有峰21,优选的是具有相同的高度。
[0327]
第二轨道402的峰21的高度优选地等于或大约等于第一轨道401的峰11的高度。
[0328]
峰21的高度优选地在30mm和60mm之间。
[0329]
轨道402的宽度优选地是恒定的或基本上恒定的。
[0330]
轨道402的宽度优选地等于轨道401的宽度w。
[0331]
轨道402的宽度优选地在0.5mm和2mm之间。
[0332]
轨道402的总长度优选地在4000mm和6000mm之间,该长度沿轨道402的整个路径测量。
[0333]
第二轨道402的长度优选地等于第一轨道401的长度。
[0334]
如图4中所示,第一轨道401的峰11和第二轨道402的峰21优选地在相互相反的方向上,特别是在高度上,优选地沿横向于(优选地垂直于)方向d的相应方向上延伸。
[0335]
通常地,在所有实施例中,装置100、200’、200”、300、400是柔性的。装置100、200’、200”、300、400属于柔性电子领域,并且还可以称为柔性电路或“柔性箔(flex foil)”。
[0336]
优选地,但非排他地,轨道并入绝缘支撑件10中。例如,轨道被布置在紧固到彼此的两层绝缘支撑件10之间,从而基本上形成夹层结构。
[0337]
两层绝缘支撑件10中的一层可以被布置在方向盘9的主体上(例如,在方向盘的金属框架(skeleton)上或在方向盘的主体的另一层(例如由聚氨酯或另一种热硬化/热塑性元素制成)上,并且另一个绝缘层可以用例如由皮革制成的覆盖层覆盖。由此,该覆盖层有利地不具有由于导电轨道引起的突起。
[0338]
轨道可以可替代地紧固到绝缘支撑件10的表面,例如外部面。
[0339]
装置100、200’、200”、300、400优选地具有在0.1mm和1mm之间(例如在0.1mm和0.6mm之间或在0.3mm和1mm之间或在0.3mm和0.6mm之间)的总厚度;例如,厚度等于大约0.3mm,或者等于大约0.6mm。
[0340]
装置100、200’、200”、300、400的总厚度优选地远小于其最大长度和最大宽度,其中这种长度和宽度基本上对应于绝缘支撑件10的最大长度和最大宽度。例如,装置100、200’、200”、300、400的长度可以是在900mm和1200mm之间,并且宽度可以是在80mm和160mm之间或在80mm和100mm之间。根据待应用装置100、200’、200”、300、400欲提供给的任何方向盘的尺寸,可以在任何情况下选择装置100、200’、200”、300、400的尺寸。
[0341]
用于制造绝缘支撑件10的材料优选地是聚合材料。仅通过非限制性示例,绝缘支撑件10可以包括硅树脂、pvc、ps、pp、pe、pc、abs、pet、pa、pu、pur、nbr、ptfe、epdm等或由硅树脂、pvc、ps、pp、pe、pc、abs、pet、pa、pu、pur、nbr、ptfe、epdm等制成,可选地具有添加剂。绝缘支撑件优选地包括pvc或由pvc制成。
[0342]
仅通过非限制性示例,每个导电轨道可以包括或由铝、康铜(constantan)、铜、德
国银(german silver)、钢、因科内尔铬镍铁合金(inconel)、黄铜(brass)等制成。导电轨道优选地由铝制成。导电轨道优选地每个具有在10μm和200μm之间,例如在15μm和150μm之间的厚度。
[0343]
仅通过非限制性示例,可以借助蚀刻紧固到支撑件10的箔片,或者通过交联其上布置有通过切割(例如,激光切割)获得的前述导电轨道中的一个或更多个导电轨道的硅树脂支撑件来制造装置100、200’、200”、300、400。
[0344]
优选地,装置100、200’、200”、300、400,特别是支撑件10,是可延长的、可塑性和/或弹性变形,相对于静态构型或初始构型延长高达约10%
‑
20%。
[0345]
仅通过非限制性示例,根据第一实施例的装置100可以紧固到方向盘9,如下所述的,特别是参考图5a、图5b、图5c。
[0346]
例如,在图5a和图5c中示出了方向盘9,该方向盘9处于其中交通工具的轮是笔直的位置,即其中交通工具可以基本上沿直线前进的位置。
[0347]
图5a是正面正视图,而图5c是背面正视图。
[0348]
图5a和图5c还示出了方向d,其中当装置100被布置在方向盘9上时,适于与使用者的手接触的第一轨道101的表面沿方向d减小。特别地,适于与使用者的手接触的第一轨道101的表面在图5a、图5c中的方向上减小。通常地,但非排他地,方向d取决于方向盘9的形状。通常地,但非排他地,方向d平行于方向盘9的周界。例如,当装置100应用于圆形方向盘9时,方向d基本上是圆形的。
[0349]
出于说明目的,示出了轴线y,其将方向盘9分成两半,特别是分成左手部分93和右手部分94,其中“左手”和“右手”参考方向盘9的正面正视图(图5a)。方向盘9的正面部分由数字91表示,而背面部分由数字92表示。正面部分91面向驾驶员。
[0350]
左手部分93和右手部分94各自包括一半正面部分91和一半背面部分92。
[0351]
装置100被定位成使得第一轨道101被布置在方向盘9的正面部分91处,并且使得第二轨道102(当设置时)被布置在方向盘9的背面部分92处。
[0352]
更详细地,具有最大高度的第一轨道101的峰11a被布置在左手部分93的正面部分91中,优选地靠近轴线y。这种峰11a的位置在图5a中由以点结尾的虚线示意性地示出。
[0353]
具有最小高度的第一轨道101的峰11b被布置在右手部分94的正面部分91中,靠近轴线y。该峰11b的位置在图5a中由以方形结尾的虚线示意性地示出。
[0354]
具有最小高度的第二轨道102的峰21a被布置在左手部分93的背面部分92中(从正面看方向盘),靠近轴线y。该峰21a的位置在图5c中由以点结尾的虚线示意性地示出。因此,第二轨道102的峰21a与第一轨道101的峰11a基本上相对。
[0355]
具有最大高度的第二轨道102的峰21b被布置在右手部分94的背面部分92中(从正面看方向盘),靠近轴线y。该峰21”的位置在图5c中由以方形结尾的虚线示意性地示出。因此,第二轨道102的峰21b与第一轨道101的峰11b基本上相对。
[0356]
根据第二实施例(第一变体)、第三实施例和第四实施例,刚刚描述的装置100的布置也分别适用于装置200’、300和400。
[0357]
对于根据第二实施例的第二变体的装置200”,第一轨道和第二轨道被布置在方向盘9的正面部分91和背面部分92处。
[0358]
可选地,仅方向盘的一部分,例如从方向盘的70%到80%,设置有装置100、200’、
200”、300、400。因此,驾驶员身体的其他部分(例如,他的/她的膝盖)和方向盘之间的任何接触都并不会被检测到。
[0359]
仅通过非限制性示例的方式,参考下表以及图6a、图6b、图6c、图7a、图7b、图7c、图8a、图8b、图8c,描述了一种方法,用于根据第一实施例操作装置100,其中第一轨道101和第二轨道102两者都设置在该装置100中。
[0360]
这种操作方法也可适用于装置200’、300和400。
[0361][0362]
将装置100连接到被适当地编程以执行这种方法的电子控制单元,从而形成一种系统或设备。
[0363]
该方法提供了限定用于电量(例如,电容)的阈值。
[0364]
关于这种阈值,在接触之后,也可以在间接接触之后,根据发生接触的区域,手和第一轨道101之间可能存在高的即远大于阈值的电容变化(在表格中用字母“h”表示),或者低的即略大于阈值的电容变化(在表格中用字母“l”表示)。
[0365]
类似地关于该阈值,在手和第二轨道102之间的接触之后,根据发生接触的区域,可能存在高的即远大于阈值的电容变化(h),或低的即略大于阈值的电容变化(l)。例如,值h和阈值之间的差在8pf和20pf(微微法拉(pico
‑
farad))之间,且值l和阈值之间的差在2pf和4pf之间。
[0366]
由电子控制单元读取的电容值有利地根据与方向盘9发生接触的位置而变化。
[0367]
应当理解,手和第一轨道和/或第二轨道102之间的接触还可以是间接接触。接触优选地是间接的,即驾驶员的手触摸方向盘的外覆盖层,装置100,特别是轨道101、102设置在该外覆盖层的下方。
[0368]
对于两个轨道101、102,阈值优选地是相同的。
[0369]
根据在要检测的最小触摸值(例如,2个手指),即最小触摸接触表面处的电容变化,选择阈值。
[0370]
表格提到了“手掌左触”和“手掌右触”,其表示仅分别在方向盘9的左手部分93的正面部分91中和在方向盘9的右手部分94的正面部分91中,与手掌,特别是张开的手掌的接触。
[0371]
在这些情况下,驾驶员仅触摸方向盘的正面部分91,并且因此也仅间接地触摸第一轨道101。
[0372]
表格提到了“抓握左触”和“抓握右触”,其表示分别在方向盘9的左手部分93中和在方向盘9的右手部分94中的抓握,特别地用握拢的手的抓握。
[0373]
在用握拢的手抓握方向盘的情况下,手既与正面部分91接触,并因此触摸,优选地间接地触摸第一轨道101,也与背面部分92接触,并因此触摸,优选地间接地触摸第二轨道102。
[0374]
在表格中,“n”后跟着数字“1”或数字“2”表示与方向盘9发生接触的手的数量。
[0375]
图6a、图6b、图6c示意了“no.1手掌左触”(用一只张开手掌的手接触左边)的情况。在图6a中以矩形示意性地示出了与方向盘9的接触区域z1’,并且在图6b中以矩形示意性地示出了与第一轨道101的相应接触区域z1”。
[0376]
参考表格中的第一行,在这种情况下,由电子控制单元读取的相对于第一轨道101的电容变化相对于阈值为“高”(h,第s1列),而相对于第二轨道102的电容变化基本上等于零(0,第s2列)。因此,存在以下逻辑关系:“s1和s2=假”和“s1或s2=真”,即可以确定未与两个轨道都接触,而仅与两个轨道之一接触,具体地仅与轨道101接触。
[0377]
此外,由于电容的变化值为高,所以可以获得在左手部分93中发生接触的区域的表示。
[0378]
图7a、图7b、图7c示意了“no.1抓握左触”(表格中的第六行)的情况,即仅用一只手抓握方向盘左边。分别在图7a和图7c中以矩形示出了与方向盘9的接触区域z2’和z2”,并且在图7b中以矩形示出了与第一轨道101和第二轨道102的相应接触区域z2
”’
。值得注意的是,包围在矩形z2
”’
中的第一轨道101的表面大于包围在该矩形z2
”’
中的第二轨道102的表面。因此,与第一轨道101相关的电容的绝对变化值为高(h,第s1列),并且在任何情况下,大于与第二轨道102相关的电容的绝对变化值,与第二轨道102相关的电容的绝对变化值为低(l,第s2列)。
[0379]
因此,存在以下逻辑关系:“s1和s2=真”和“s1或s2=真”,即可以确定与两个轨道101、102均接触。
[0380]
此外,由于与第一轨道101相关的电容变化值高,而与第二轨道102相关的电容变化值低(即第一轨道101的电容值和第二轨道102的电容值之间的差是正的),所以可以确定在方向盘的左手部分93中正发生抓握。
[0381]
参考表格的最后一行,图8a、图8b和图8c示意了“no.1抓握左触 no.1抓握右触”的情况,即用两只手的抓握,其中一只手被布置在左手部分93上,并且一只手被布置在右手部分94上。
[0382]
在这种情况下,与第一轨道101相关的电容的变化值为高,因为它由高值(左手部分93)和低值(右手部分94)之和给出。此外,与第一轨道102相关的电容的变化值也为高,因为它由低值(左手部分93)和高值(右手部分94)之和给出。
[0383]
表格的第四行总结了“no.2手掌右触”的情况,即其中驾驶员仅用他的/她的手掌触摸方向盘,其中两只手仅被布置在右手部分94中,靠近轴线y。在这里,存在两个低值之和(l l,第s1列)。
[0384]
如果装置100、200’、300和400仅设置有一个导电轨道101、201、301、401,优选地布置在正面部分91上,并且在其中两个导电轨道201和202”均优选地被布置在正面部分91上的装置200”(第二实施例的第二变体)的情况下,则可以在任何情况下确定与方向盘9接触的位置。通常地,在其中设置了两个传感器轨道,例如轨道101和102的所有实施例中,可以使用公式:c1
‑
c2)/(c1 c2)来处理轨道101的电容值c1和轨道102的电容值c2。
[0385]
此公式允许相对于触摸实体归一化差(c1
‑
c2)。换句话说,无论c1和c2的绝对值如何,始终允许具有在
‑
1和1之间的结果。
[0386]
使用该结果来检测触摸的位置。
[0387]
例如,考虑到仅用一只手接触,公式的结果趋于为1,越靠近峰11a(最大高度);此外,公式的结果趋于
‑
1,越靠近峰11b(最小高度),并且趋于0,越靠近装置100的中间。
[0388]
注意,优选地,本说明书中表示的值范围的端值也被包括在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

