1.本实用新型属于舵轮技术领域,尤其涉及一种集成式舵轮。
背景技术:
2.随着工业时代的发展,机器人的使用频率越来越高,也越来越智能化,但有些机器人在移动过程中基本都采用转向舵轮,而传统转向舵轮,其体积较大且比较笨重,那么对于一些服务机器人,其所在的场合是不需要那么大且笨重的转向舵轮,而且应用在服务机器人上的转向舵轮负载较小,一般负载基本都在2吨以下,采用现有的转向舵轮,存在体积较大、重量较重、扭力不足及精度不高的缺陷;因此,需开发一款小型化且轻量化的转向舵轮来适用于服务机器人上。
技术实现要素:
3.本实用新型的目的在于克服现有技术存在的不足,而提供一种集成式舵轮,来解决在舵轮的体积较大且笨重等问题。
4.本实用新型的目的是通过如下技术方案来完成的,这种集成式舵轮包括轮毂、转向机构及行走机构,所述转向机构与所述行走机构之间通过连接架连接,且所述轮毂安装在所述行走机构上;所述转向机构安装在所述连接架的上方,并通过转向机构的转动来带动行走机构及轮毂的同步转向;所述行走机构安装在所述连接架的侧方,并通过行走机构的转动来带动转向机构及轮毂的同步移动。
5.作为优选,所述转向机构包括谐波减速器、第一伺服电机及第一编码器,所述第一伺服电机的驱动轴与所述谐波减速器内的波发生器相连接,且所述谐波减速器内的刚轮与所述连接架连接固定并来驱动轮毂的转向,所述第一伺服电机与所述第一编码器通信连接,并通过所述第一编码器控制第一伺服电机的运转。
6.作为优选,所述行走机构包括行星减速机、第二伺服电机及第二编码器,所述第二伺服电机的驱动轴与所述行星减速机内的太阳轮相连接,且所述行星减速机内的齿圈与所述轮毂连接固定并来驱动轮毂的运转,所述第二伺服电机与所述第二编码器通信连接,并通过所述第二编码器控制第二伺服电机的运转。
7.作为优选,所述轮毂通过安装架安装在所述行走机构上。
8.作为优选,所述连接架为l形结构,所述连接架的一端面与所述转向机构之间通过螺栓组件连接固定,所述连接架的另一端面与所述行走机构之间通过一体成型方式或焊接方式固定。
9.作为优选,所述转向机构位于所述轮毂径向的正上方,所述行走机构位于所述轮毂的轴向端。
10.本实用新型的有益效果为:把传统的伺服电机、谐波减速机、编码器有效的集成起来,并实现小型化、大负载的舵轮,来满足服务机器人上的舵轮的体积小、扭力大、传动精度高的特点。
附图说明
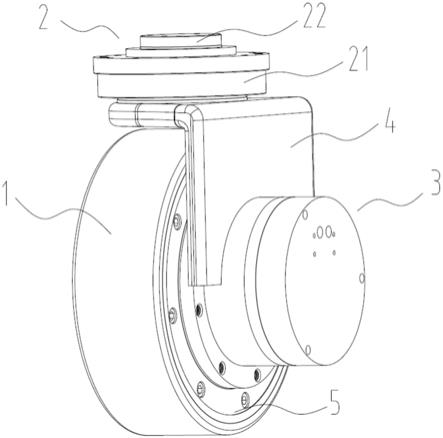
11.图1是本实用新型的整体结构示意图一。
12.图2是本实用新型的整体结构示意图二。
13.图3是本实用新型的主视剖面结构示意图。
14.附图中的标号分别为:1、轮毂;2、转向机构;3、行走机构;4、连接架;5、安装架;21、谐波减速器;22、第一伺服电机;23、第一编码器;31、行星减速机;32、第二伺服电机;33、第二编码器;21
‑
1、刚轮;21
‑
2、波发生器;31
‑
1、齿圈。
具体实施方式
15.下面将结合附图对本实用新型做详细的介绍:如附图1至3所示,本实用新型包括轮毂1、转向机构2及行走机构3,转向机构2与行走机构3之间通过连接架4连接,且轮毂1安装在行走机构3上;转向机构2安装在连接架4的上方,并通过转向机构2的转动来带动行走机构3及轮毂1的同步转向;行走机构3安装在连接架4的侧方,并通过行走机构3的转动来带动转向机构2及轮毂1的同步移动;将转向机构和行走机构集成到连接架上,从而实现整个舵轮的小型化及体积紧凑化的优点。
16.转向机构2包括谐波减速器21、第一伺服电机22及第一编码器23,第一伺服电机22的驱动轴与谐波减速器21内的波发生器21
‑
2固定连接,且谐波减速器21内的刚轮21
‑
1与连接架4通过螺栓组件连接固定并来驱动轮毂1的转向,从而实现整个舵轮的转向运动;第一伺服电机22与第一编码器23通信连接,并通过第一编码器23控制第一伺服电机22的运转;例如:控制第一伺服电机22的正反转来实现整个舵轮的正反转,或控制第一伺服电机22的转速来实现整个舵轮在转向过程中的快慢及稳定性。且第一伺服电机22的壳体与外界的舵轮固定架相固定连接。
17.行走机构3包括行星减速机31、第二伺服电机32及第二编码器33,第二伺服电机32的驱动轴与行星减速机31内的太阳轮相啮合连接,且行星减速机31内的齿圈31
‑
1与轮毂1连接固定并来驱动轮毂1的运转,从而实现整个舵轮的线性移动;第二伺服电机32与第二编码器33通信连接,并通过第二编码器33控制第二伺服电机32的运转;例如:控制第二伺服电机32的正反转来实现整个舵轮的线性来回移动,或控制第二伺服电机32的转速来实现整个舵轮在线性来回移动过程中的快慢及稳定性。且第二伺服电机32的壳体与行星减速机31的壳体相固定连接。
18.上述结构的优点在于:把传统的伺服电机、谐波减速机、编码器有效的集成起来,并实现小型化、大负载的舵轮,来满足服务机器人上的舵轮的体积小、扭力大、传动精度高的特点。
19.上述中的编码器采用磁编编码器,可以适用于比较复杂的环境,传统的光电编码器体积个头比较大对周围环境要求比较高,磁编编码器体积很薄很小巧、是传统的光电编码器的1/10,精度高于传统光电编码器,磁编编码器抗干扰对外界要求不是特别的高,遇到水渍、油、不会影响到它的精度。
20.上述中的谐波减速机属于非常高精密的减速机,是机器人领域的重要组成部分,精度可以做到约20个弧秒、震动小、噪音小、体积小、扭力大,速比50到300之间,传动误差在25弧秒左右。
21.为了使轮毂1与行星减速机31之间的安装拆卸更为方便,轮毂1通过安装架5安装在行星减速机31的齿圈壁上,且安装架5的一端为法兰状,与之对应的行星减速机31的齿圈壁的一端也为法兰状,通过螺栓组件实现固定连接。
22.为了使舵轮的整体结构紧凑化,连接架4为l形结构,连接架4的一端面与谐波减速器21内的刚轮之间通过螺栓组件连接固定,连接架4的另一端面与行星减速机31的壳体之间通过一体成型方式或焊接方式固定,为了出于加工成本的考虑,一般都采用焊接方式固定。
23.转向机构2位于轮毂1径向的正上方,行走机构3位于轮毂1的轴向端,且转向机构2及行走机构3均位于连接架4的外侧,轮毂1位于连接架4的内侧;这样使得舵轮小型化、紧凑化。
24.本实用新型不局限于上述实施方式,不论在其形状或材料构成上作任何变化,凡是采用本实用新型所提供的结构设计,都是本实用新型的一种变形,均应认为在本实用新型保护范围之内。
技术特征:
1.一种集成式舵轮,包括轮毂(1)、转向机构(2)及行走机构(3),其特征在于:所述转向机构(2)与所述行走机构(3)之间通过连接架(4)连接,且所述轮毂(1)安装在所述行走机构(3)上;所述转向机构(2)安装在所述连接架(4)的上方,并通过转向机构(2)的转动来带动行走机构(3)及轮毂(1)的同步转向;所述行走机构(3)安装在所述连接架(4)的侧方,并通过行走机构(3)的转动来带动转向机构(2)及轮毂(1)的同步移动。2.根据权利要求1所述的集成式舵轮,其特征在于:所述转向机构(2)包括谐波减速器(21)、第一伺服电机(22)及第一编码器(23),所述第一伺服电机(22)的驱动轴与所述谐波减速器(21)内的波发生器相连接,且所述谐波减速器(21)内的刚轮与所述连接架(4)连接固定并来驱动轮毂(1)的转向,所述第一伺服电机(22)与所述第一编码器(23)通信连接,并通过所述第一编码器(23)控制第一伺服电机(22)的运转。3.根据权利要求1所述的集成式舵轮,其特征在于:所述行走机构(3)包括行星减速机(31)、第二伺服电机(32)及第二编码器(33),所述第二伺服电机(32)的驱动轴与所述行星减速机(31)内的太阳轮相连接,且所述行星减速机(31)内的齿圈与所述轮毂(1)连接固定并来驱动轮毂(1)的运转,所述第二伺服电机(32)与所述第二编码器(33)通信连接,并通过所述第二编码器(33)控制第二伺服电机(32)的运转。4.根据权利要求1所述的集成式舵轮,其特征在于:所述轮毂(1)通过安装架(5)安装在所述行走机构(3)上。5.根据权利要求1所述的集成式舵轮,其特征在于:所述连接架(4)为l形结构,所述连接架(4)的一端面与所述转向机构(2)之间通过螺栓组件连接固定,所述连接架(4)的另一端面与所述行走机构(3)之间通过一体成型方式或焊接方式固定。6.根据权利要求1所述的集成式舵轮,其特征在于:所述转向机构(2)位于所述轮毂(1)径向的正上方,所述行走机构(3)位于所述轮毂(1)的轴向端。
技术总结
本实用新型涉及一种集成式舵轮,包括轮毂、转向机构及行走机构,转向机构与行走机构之间通过连接架连接,且轮毂安装在行走机构上;转向机构安装在连接架的上方,并通过转向机构的转动来带动行走机构及轮毂的同步转向;行走机构安装在连接架的侧方,并通过行走机构的转动来带动转向机构及轮毂的同步移动;本实用新型的有益效果为:把传统的伺服电机、谐波减速机、编码器有效的集成起来,并实现小型化、大负载的舵轮,来满足服务机器人上的舵轮的体积小、扭力大、传动精度高的特点。传动精度高的特点。传动精度高的特点。
技术研发人员:武明田
受保护的技术使用者:浙江宁波智动机器人技术有限公司
技术研发日:2021.01.21
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

