1.本发明涉及人工智能设备技术领域,更具体地说,特别涉及一种地铁隧道人工智能机器人。
背景技术:
2.地铁是铁路运输的一种形式,指在地下运行为主的城市轨道交通系统,即“地下铁道”或“地下铁”的简称。许多此类系统为了配合修筑的环境,并考量建造及营运成本,可能会在城市中心以外地区转成地面或高架路段。地铁是涵盖了城市地区各种地下与地上的路权专有、高密度、高运量的城市轨道交通系统。
3.现在地铁在停运后,相关工作人员需要对地铁隧道进行巡检,检测地铁隧道是否存在渗水的情况,以避免地铁隧道存在渗水情况,影响隧道的正常使用,但是现在对地铁隧道进行渗水检测通常都是采用人工检测的方式进行,由于地铁的隧道长度比较长,人工检测需要行走很好的距离,检测速度慢,检测效率低,同时还存在工作强度大的缺点。
4.为此,我们提出一种地铁隧道人工智能机器人来解决上述问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的问题,而提出的一种地铁隧道人工智能机器人。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种地铁隧道人工智能机器人,包括底座,所述底座的底部安装有位移机构,所述底座的顶部固定连接有下端开口的上罩壳,所述底座的顶部依次固定设置有plc控制器、蓄电池和通讯装置,所述底座的内顶部固定设置有驱动电机b和驱动电机c,所述上罩壳的顶部固定连接有支撑板,所述支撑板上转动连接有转轴b,所述转轴b的一端贯穿支撑板并固定连接有呈半圆形设置的固定支架,所述固定支架上安装有多个摄像机,多个所述摄像机以固定支架的圆心为圆心呈半圆形排列设置,所述驱动电机b通过联动机构a与转轴b的一端连接;
8.所述上罩壳上转动连接有转轴c,所述转轴c的底部贯穿上罩壳并通过联动机构b与驱动电机c的输出端连接,所述转轴c的顶部固定连接有转动板,所述转动板的顶部通过电动液压伸缩杆a连接有升降板,所述升降板的一端底部通过电动液压伸缩杆b连接有电磁铁,所述上罩壳的顶部设置有下端开口的塑料桩,所述塑料桩的顶部安装有铁片,所述电磁铁与铁片吸合连接;
9.所述plc控制器分别与蓄电池、通讯装置、驱动电机b、驱动电机c、摄像机、电动液压伸缩杆a、电动液压伸缩杆b和电磁铁之间电连接。
10.优选地,所述底座的一端底部通过两个转动件连接有两个万向轮;
11.所述底座远离万向轮的一端底部固定连接有两个对称设置的固定板,两个所述固定板通过转轴a连接,且所述转轴a的两端均贯穿固定板并固定连接有滚轮,所述底座的顶
部固定连接有驱动电机a,所述驱动电机a与plc控制器电连接,所述驱动电机a的输出端通过联动机构c与转轴a连接。
12.优选地,所述联动机构c包括固定连接在驱动电机a输出轴上的链轮a,所述转轴a的外侧壁固定套接的链轮b,所述链轮a通过链条与链轮b连接,所述底座上设置有与链条对应的贯穿口。
13.优选地,所述联动机构a包括固定连接在驱动电机b输出端上的锥齿轮a,所述转轴b远离固定支架的一端固定连接有锥齿轮b,所述锥齿轮a与锥齿轮b啮合。
14.优选地,所述联动机构b包括固定连接在驱动电机c输出端的锥齿轮c,所述转轴c的底部固定连接有锥齿轮d,所述锥齿轮c与锥齿轮d啮合连接。
15.优选地,所述转轴b和转轴c分别通过轴承与支撑板和上罩壳连接。
16.优选地,所述塑料桩的外侧壁上固定套接有荧光贴。
17.优选地,所述上罩壳的顶部固定连接有报警提醒灯,所述报警提醒灯与plc控制器电连接。
18.本发明的实施例提供的技术方案包括以下有益效果:
19.1、与现有技术相比,本发明中,利用安装在固定支架上的摄像机对地铁隧道内的墙壁进行拍摄,然后发送到plc控制器内进行比对识别,利用plc控制器判断地铁隧道内是否存在渗水的情况,当存在渗水现象时,通过通讯装置将定位以及拍摄到的渗水图片传到后端,此外,利用该人工智能机器人代理人工对对地铁隧道内的墙壁进行渗水检测,检测速度快,检测效率高,同时还降低了相关工作人员的工作强度;
20.2、与现有技术相比,本发明中,当该人工智能机器人检测到地铁隧道墙壁上存在渗水的现象时,电动液压伸缩杆a的长度和电动液压伸缩杆b的长度均进行收缩,电磁铁吸附安装在塑料桩上的铁片,然后驱动电机转动,电动液压伸缩杆a的长度和电动液压伸缩杆b的长度均进行延长,电磁铁断电,将塑料桩防止在地面上,以便于相关工作人员快速的找到渗水位置。
附图说明
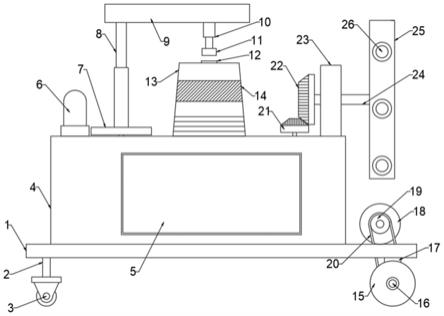
21.图1为本发明提出的一种地铁隧道人工智能机器人的结构示意图;
22.图2为本发明提出的一种地铁隧道人工智能机器人的内部结构示意图;
23.图3为本发明提出的一种地铁隧道人工智能机器人中固定支架和摄像机的连接结构示意图;
24.图4为本发明提出的一种地铁隧道人工智能机器人中底座、固定板、转轴、链轮a、链条、链轮b、滚轮和驱动电机a的连接结构示意图;
25.图5为本发明提出的一种地铁隧道人工智能机器人中转动减半和万向轮的连接结构示意图。
26.图中:1、底座;2、转动件;3、万向轮;4、上罩壳;5、检修门;6、报警提醒灯;7、转动板;8、电动液压伸缩杆a;9、升降板;10、电动液压伸缩杆b;11、电磁铁;12、铁片;13、塑料桩;14、荧光贴;15、滚轮;16、转轴a;17、固定板;18、驱动电机a;19、链轮a;20、链条;21、锥齿轮a;22、锥齿轮b;23、支撑板;24、转轴b;25、固定支架;26、摄像机;27、驱动电机b;28、锥齿轮c;29、锥齿轮d;30、驱动电机c;31、plc控制器;32、蓄电池;33、通讯装置;34、链轮b。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.参照图1
‑
图5,一种地铁隧道人工智能机器人,包括底座1,底座1的底部安装有位移机构,底座1的顶部固定连接有下端开口的上罩壳4,底座1的顶部依次固定设置有plc控制器31、蓄电池32和通讯装置33,底座1的内顶部固定设置有驱动电机b27和驱动电机c30,上罩壳4的顶部固定连接有支撑板23,支撑板23上转动连接有转轴b24,转轴b24的一端贯穿支撑板23并固定连接有呈半圆形设置的固定支架25,固定支架25上安装有多个摄像机26,多个摄像机26以固定支架25的圆心为圆心呈半圆形排列设置,驱动电机b27通过联动机构a与转轴b24的一端连接;
29.上罩壳4上转动连接有转轴c,转轴c的底部贯穿上罩壳4并通过联动机构b与驱动电机c30的输出端连接,转轴c的顶部固定连接有转动板7,转动板7的顶部通过电动液压伸缩杆a8连接有升降板9,升降板9的一端底部通过电动液压伸缩杆b10连接有电磁铁11,上罩壳4的顶部设置有下端开口的塑料桩13,塑料桩13的顶部安装有铁片12,电磁铁11与铁片12吸合连接;
30.plc控制器31分别与蓄电池32、通讯装置33、驱动电机b27、驱动电机c30、摄像机26、电动液压伸缩杆a8、电动液压伸缩杆b10和电磁铁11之间电连接。
31.位移机构的作用是方便该人工智能机器人在地铁轨道上前进,以便于该人工智能机器人对地铁隧道的墙壁进行渗水检测。
32.蓄电池32的作用是为该人工智能机器人进行供电。
33.通讯装置33的作用是将该人工智能机器人检测到的结果实时传输到后端,以便于相关工作人员在后端即可查看到地铁隧道内的情况。
34.需要说明的是,摄像机26为星光摄像机,且具备强光抑制功能,摄像机26的作用是用于拍摄隧道内侧壁上的画面,以便于将画面传输到plc控制器31内,利用plc控制器31对拍摄到的图片和视频进行画面识别,判断是否存在。
35.驱动电机b27的作用是带动固定支架25在一定的范围内往复运动,以便于摄像机26对一定范围内的地铁隧道墙壁进行拍摄,避免拍摄死角。
36.驱动电机c30的作用是带动转动板7转动,以便于安装在升降板9上的电磁铁11吸附塑料桩13将塑料桩13放在地面上,达到对去墙壁渗水的地方进行标记,方便相关人员快速的找到地铁隧道墙壁咯渗水的地方进行维修,避免安全事故的发生。
37.更具体地,底座1的一端底部通过两个转动件2连接有两个万向轮3;
38.底座1远离万向轮3的一端底部固定连接有两个对称设置的固定板17,两个固定板17通过转轴a16连接,且转轴a16的两端均贯穿固定板17并固定连接有滚轮15,底座1的顶部固定连接有驱动电机a18,驱动电机a18与plc控制器31电连接,驱动电机a18的输出端通过联动机构c与转轴a16连接。
39.需要说明的是万向轮3的轮子上和滚轮15上均设置有地铁轨道对应的凹槽,防止该人工机器人按照地铁轨道前进,避免脱离轨道。
40.更具体地,联动机构c包括固定连接在驱动电机a18输出轴上的链轮a19,转轴a16的外侧壁固定套接的链轮b34,链轮a19通过链条20与链轮b34连接,底座1上设置有与链条
20对应的贯穿口。
41.便于驱动电机a18转动带动转轴a16转动,从而带动该人工智能机器人在地铁轨道上前进。
42.更具体地,联动机构a包括固定连接在驱动电机b27输出端上的锥齿轮a21,转轴b24远离固定支架25的一端固定连接有锥齿轮b22,锥齿轮a21与锥齿轮b22啮合。
43.更具体地,联动机构b包括固定连接在驱动电机c30输出端的锥齿轮c28,转轴c的底部固定连接有锥齿轮d29,锥齿轮c28与锥齿轮d29啮合连接。
44.更具体地,转轴b24和转轴c分别通过轴承与支撑板23和上罩壳4连接。
45.轴承的作用是减少转轴b24与支撑板23之间的转动摩擦力,同时对转轴b24在支撑板23上的位置进行固定;减少转轴c与上罩壳4之间的转动摩擦力,同时对转轴c在上罩壳4上的位置进行固定。
46.更具体地,上罩壳4的外侧壁上设置有检修门5。
47.更具体地,塑料桩13的外侧壁上固定套接有荧光贴14。
48.荧光贴14的作用是方便相关工作人员快速的找到放置在地铁轨道旁边的塑料桩13,缩短相关工作人员找到地铁隧道渗水处的时间。
49.更具体地,上罩壳4的顶部固定连接有报警提醒灯6,报警提醒灯6与plc控制器31电连接。
50.本发明中,当需要使用该人工智能机器人进行寻找地铁隧道墙壁渗水位置时,将该人工智能机器人放置在地铁轨道,该人工智能机器人在轨道上前进的过程中,驱动电机b27带动转轴b24转动,转轴b24转动带动固定支架25转动,固定支架25上的摄像机26对地铁隧道墙壁进行拍摄,摄像机26拍摄到的图片或者视频传输到plc控制器31内进行智能识别,如果plc控制器31识别到的画面信息为墙壁渗水,则控制驱动电机a18停止转动,plc控制器31将拍摄到的图片或者视频发送到后端设备,且控制电动液压伸缩杆a8和电动液压伸缩杆b10的长度收缩,电磁铁11吸附安装在塑料桩13顶部的铁片12,达到将塑料桩13固定在电动液压伸缩杆b10上的效果,然后电动液压伸缩杆a8的长度伸长,驱动电机c30转动带动转动板7转动到一定的位置后,电动液压伸缩杆a8的长度收缩,电动液压伸缩杆b10的长度延长,并将塑料桩13放置在地面上,最后,电动液压伸缩杆a8和电动液压伸缩杆b10的长度进行复位,且驱动电机c30对转动板7的位置进行复位,plc控制器31控制驱动电机a18驱动滚轮15继续前进,且驱动电机b27驱动固定支架25带动摄像机26往复运动对地铁隧道内的墙壁进行拍摄。
51.本发明中,利用安装在固定支架25上的摄像机26对地铁隧道内的墙壁进行拍摄,然后发送到plc控制器31内进行比对识别,利用plc控制器31判断地铁隧道内是否存在渗水的情况,当存在渗水现象时,通过通讯装置33将定位以及拍摄到的渗水图片传到后端,此外,利用该人工智能机器人代理人工对对地铁隧道内的墙壁进行渗水检测,检测速度快,检测效率高,同时还降低了相关工作人员的工作强度。
52.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

