1.本实用新型涉及军用无人机领域,具体是一种车载军用无人机自动起降装置。
背景技术:
2.为了适应未来信息化战争环境下机动灵活、快速反应的要求,无人机逐渐应用在现代战场上。与传统作战相比,无人机作战具有人员零伤亡、机动优势明显、隐蔽性能突出、作战效能高等优势,其作战运用深刻影响着诸军兵种的作战行动。随着无人机在现代战争中的大规模运用,升降辅助平台的完善愈发迫切,建立移动迅速、功能完备、地形要求简单、展开方式便捷、可操作性强的车载无人机自动起降装置符合当下装备发展需求,有鉴于此,这就需要设计一种新型的车载无人机自动起降装置。
技术实现要素:
3.本实用新型所要解决的技术问题是针对现有技术的不足,提供一种车载军用无人机自动起降装置,以辅助军用无人机的起降工作。
4.为了实现上述目的,本实用新型采取的技术方案如下:
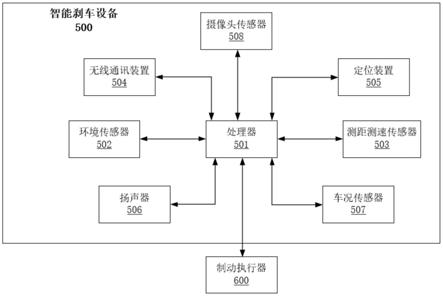
5.一种车载军用无人机自动起降装置,包括安装在汽车内的无人机升降控制箱,装载在汽车顶部的无人机运载箱体,以及驱动无人机运载箱体顶盖开合的顶盖驱动模块;所述无人机运载箱体内设有用于驱动无人机升降的升降平台模块以及分别用于监测顶盖驱动模块、升降平台模块状态的传感器模块。
6.具体地,所述顶盖驱动模块包括滑盖、导轨、推杆以及顶盖驱动电机;所述导轨水平的铺设在无人机运载箱体的顶部并向箱体外部延伸;所述滑盖滑动地设置在导轨上,并能够沿导轨水平滑动,当滑动至无人机运载箱体的顶部时,作为无人机运载箱体顶盖进行盖合;所述推杆与导轨相互平行设置,推杆的一端与滑盖的一侧螺纹连接,另一端与顶盖驱动电机,所述顶盖驱动电机驱动推杆旋转,通过螺纹使得滑盖沿推杆方向在导轨上进行水平滑动。
7.具体地,所述的升降平台模块包括电动剪式升降装置和升降平台,所述电动剪式升降装置的底部安装在无人机运载箱体底面上,通过一侧的升降驱动电机驱动;
8.所述升降平台通过隔振器安装在电动剪式升降装置的顶部。
9.进一步地,所述升降平台的顶部设有用于固定无人机的搭扣以及电磁铁。
10.进一步地,所述传感器模块包括箱体顶盖传感器和升降平台传感器;所述箱体顶盖传感器设置在无人机运载箱体顶部,位于顶盖驱动模块的运动轨迹上;所述升降平台传感器设置在无人机运载箱体内,位于升降平台模块的运动轨迹上。
11.进一步地,还包括电源模块,所述电源模块与无人机升降控制箱、以及顶盖驱动模块、升降平台模块电路连接,对其进行供电和开关控制。无人机升降控制箱同时连接箱体顶盖传感器和升降平台传感器,根据传感器返回信息对当前箱体状态进行显示,以供使用人进行判断和操作。
12.有益效果:
13.本实用新型车载军用无人机自动起降装置能够实现恶劣作战环境下进行车载无人机自动起降;具有机动灵活、外形隐蔽、操作简单、满足野外使用等优点。
附图说明
14.下面结合附图和具体实施方式对本实用新型做更进一步的具体说明,本实用新型的上述和/或其他方面的优点将会变得更加清楚。
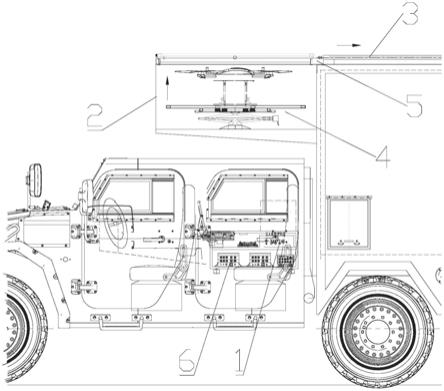
15.图1是该车载军用无人机自动起降装置的整体结构示意图;
16.图2是无人机运载箱体的内部结构示意图;
17.图3是顶盖驱动模块的结构示意图;
18.图4是升降平台模块的结构示意图;
19.图5是本实用新型的功能组成及原理框图;
20.图6是本实用新型无人机控制系统示意图;
21.图7是本实用新型无人机升降平台控制箱面板示意图;
22.图8是本实用新型无人机升降平台控制箱电路连接示意图。
23.其中,各附图标记分别代表:1无人机升降控制箱;2无人机运载箱体;3顶盖驱动模块;31滑盖;32导轨;33推杆;34顶盖驱动电机;4升降平台模块;41电动剪式升降装置;42升降平台;43升降驱动电机;44隔振器;45搭扣;46电磁铁;5传感器模块;6电源模块。
具体实施方式
24.根据下述实施例,可以更好地理解本实用新型。
25.说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容所能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“前”、“后”、“中间”等用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
26.如图1所示,本实用新型车载军用无人机自动起降装置包括安装在汽车内的无人机升降控制箱1,装载在汽车顶部的无人机运载箱体2,以及驱动无人机运载箱体2顶盖开合的顶盖驱动模块3;所述无人机运载箱体2内设有用于驱动无人机升降的升降平台模块4以及分别用于监测顶盖驱动模块3、升降平台模块4状态的传感器模块5,还有电源模块6。
27.其中,如图2所示,无人机运载箱体2的开口尺寸和升降平台深度尺寸,满足无人机存放,箱体为整体成型的钣金加工件,采用无痕点焊工艺,冲模冲压成型,保证了箱体外观整洁,强度可靠。箱体外表设置需专用模具冲压成型的内凹图形,实现军用无人机隐蔽存储。
28.顶盖驱动模块3如图3所示,包括滑盖31、导轨32、推杆33以及顶盖驱动电机34;所述导轨32水平的铺设在无人机运载箱体2的顶部并向箱体外部延伸;所述滑盖31滑动地设置在导轨32上,并能够沿导轨32水平滑动,当滑动至无人机运载箱体2的顶部时,作为无人
机运载箱体2顶盖进行盖合;所述推杆33与导轨32相互平行设置,推杆33的一端与滑盖31的一侧螺纹连接,另一端与顶盖驱动电机34,所述顶盖驱动电机34驱动推杆33旋转,通过螺纹使得滑盖31沿推杆33方向在导轨32上进行水平滑动。固定在车顶面的顶盖驱动电机34通过正反转控制推杆33伸出或缩进,推杆33的伸出缩进端与滑盖31铰接,滑盖31两侧通过轴承限制在导轨32内前后滑动,两侧导轨32与车顶面固定。通过顶盖驱动电机34的正反转推出或缩进推杆33,带动箱体滑盖31在导轨32内前后滑动,实现无人机箱体顶盖的闭合或开启。
29.升降平台模块4如图4所示,包括电动剪式升降装置41和升降平台42,所述电动剪式升降装置41的底部安装在无人机运载箱体2底面上,通过一侧的升降驱动电机43驱动控制电动剪式机构的正反转,驱动剪式机构上下2个支臂收或扩,实现升降平台上升或下降,从而带动无人机进行升降操作。升降平台42通过钢丝绳隔振器44安装在电动剪式升降装置41的顶部,满足野战条件下运输防护使用。
30.升降平台42的顶部设有用于固定无人机的搭扣45以及电磁铁46,利用无人机对机内电磁铁的断电和通电,实现无人机与升降平台磁性吸附固定和自动脱离。无人机越野运载时,升降平台42通过搭扣45和电磁铁46吸附同时固定无人机,无人机滑撬内含经过特殊处理的电磁铁,可在通电时消磁,断电时有磁性,升降平台采用导磁材料制造。到达预设阵地执行任务前,先松开搭扣,无人机通电滑撬消磁,实现无人机与升降平台脱离;反之,无人机断电滑撬有磁性,实现无人机与升降平台吸附固定。
31.传感器模块5包括箱体顶盖传感器和升降平台传感器;所述箱体顶盖传感器设置在无人机运载箱体2顶部,位于顶盖驱动模块3的运动轨迹上;所述升降平台传感器设置在无人机运载箱体2内,位于升降平台模块4的运动轨迹上。
32.如图5和图6所示,箱体顶盖传感器无人机顶盖打开到位传感器,无人机顶盖关闭到位传感器,升降平台传感器包含升降平台上升到位传感器,升降平台下降到位传感器。
33.电源模块6与无人机升降控制箱1、以及顶盖驱动模块3、升降平台模块4电路连接,无人机升降控制箱1依托底盘取电,对整个装置进行供电,控制以及反馈状态。无人机升降控制箱1连接升降驱动电机43、顶盖驱动电机34对其进行供电和开关控制,同时连接箱体顶盖传感器和升降平台传感器,根据传感器返回信息对当前箱体状态进行显示,以供使用人进行判断和操作。本实用新型中,所述无人机升降平台控制箱内控制模块为西门子6es7 288
‑
1st20
‑
0aa0,扩展模块为西门子6es7 288
‑
5dt04
‑
0aa0。升降驱动电机43、顶盖驱动电机34均采用普达aqmd3620ns。
34.如图7所示,无人机自动起降装置工作模式包括“架设”和“撤收”两种功能。如图7所示,按动对应控制按钮,系统将依次完成所有动作,在按动“停止”按钮后立即停止工作。当系统正在工作时,系统状态指示灯闪烁表示系统当前的工作;当部件运动到位后,状态指示灯由闪烁变为长亮,表示部件运动到位,对应部件停止运动。当系统处于中间状态时,系统将自动判断并继续进行未完成的动作。
35.架设:无人机箱体顶盖在电机牵引下,沿两侧导轨向后方移动,当到达指定位置时,顶盖开到位传感器发送信号,控制箱顶盖开到位灯亮;随后,无人机运载箱体内电动剪式机构进行支起动作,无人机随平台上升至顶盖高度,上升到位传感器反馈信号至控制系统,系统停止上升,解除固定在滑橇上的搭扣,无人机内电磁铁通电解除磁性后可准备起飞。
36.撤收:无人机在定位辅助功能下降落至平台中央,经确认位置可撤收后,无人机内磁铁通电吸附升降平台,滑橇固定搭扣,平台下降,到达底部固定位置后,下降到位传感器反馈信号,控制系统停止电动剪式机构收起动作,电机推动箱体顶盖向前,待完全合拢后触发顶盖关到位传感器信号,系统完成无人机撤收工作。
37.各部分工作时存在相互关联和干涉的现象,为保护系统可靠运行,系统设置以下互锁保护功能设计:
38.箱体顶盖未打开到位,升降平台不能上升;
39.升降平台未下降到位,箱体顶盖不能关闭。
40.如图8所示,控制系统以西门子可编程控制器为逻辑器件,以电机驱动器为电机驱动设备。西门子可编程控制器通过输入输出接口采集系统状态或控制指令,进行逻辑判断,并发出相应的控制信号给电机驱动器。驱动器根据接受到的指令控制机构驱动电机工作,同时检测驱动电机的工作电流进行过载保护功能。控制系统具有以下主要工作特点:(1)对驱动电动机、控制电路进行过载、短路保护;(2)顶盖的开/闭,平台的升/降具有互锁保护;(3)控制箱上设置对应各限位检测开关的指示灯,显示平台所处状态;(4)具有一键架设或撤收功能。
41.本装置显著特点是在复杂环境下可迅速灵活实现无人机升降操作,采用一键架设/撤收设计,操作简单便捷,适应多种作战任务需求。各模块具有坚固的机械结构,装置可靠性高,满足车载设备恶劣环境要求。
42.本实用新型提供了一种车载军用无人机自动起降装置的思路及方法,具体实现该技术方案的方法和途径很多,以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。