1.本发明属于机器人领域,具体涉及一种储能可控的自释放弹跳机构。
背景技术:
2.跳跃运动是一种要求爆发能力强,能量密度很高的运动。自然界中,很多动物依靠跳跃和其他运动方式(如行走,飞行等)结合以应对复杂的外界环境。动物的跳跃运动给仿生工程领域带来许多灵感,目前关于跳跃的研究主要集中在跳跃机制和弹跳机器人上。
3.弹跳机器人从能量驱动上大致分为机械弹性能、化学释放能和场力作用能三类。目前大多数跳跃机器人采用的都是弹性元件和锁死机构结合实现间歇式跳跃,极少数可以实现复杂环境下的不同起跳高度的跳跃。
4.申请号201820557280.x公开了一种依靠缺齿齿轮实现弹跳机器人的连续跳跃的方案,该方案设计的机器人能实现不同起跳角度的跳跃,并且能实现连续起跳。但是该方案使用的缺齿机构限制了机器人只能跳跃固定高度,对于较为平缓的台阶等复杂路面不能根据实际路况跳跃不同的高度,浪费很多能量,并且机器人弹跳高度太高会导致空中姿态不稳定,硬着陆降低了机器人的使用寿命。
5.申请号201110114993.1公开了一种跳跃度可调的仿生弹跳机构,该机构实现了弹跳机构的高度和起跳角度可调,并且能实现弹跳机器人转向的功能。该机构使用的是变齿轮组实现机器人不同能量的储存,从而实现不同高度跳跃,但是花键轴与齿轮啮合存在啮合不准确的缺点,无法保证精确的变齿轮组过程,并且该机构复杂,控制难度大,固定的3级变齿轮组只能实现三种不同高度的跳跃高度,无法实现连续的变高度跳跃。
技术实现要素:
6.要解决的技术问题:
7.为了避免现有技术的不足之处,本发明提出一种储能可控的自释放弹跳机构,根据实际需求储存能量,实现不同高度弹跳的机器人,该机器人机构设计简单,控制方便,满足不同路况的弹跳需要。
8.本发明的技术方案是:一种储能可控的自释放弹跳机构,其特征在于:包括电机、机架、离合机构、弹跳机构和储能机构;
9.所述机架用于安装电机、离合机构、弹跳机构和储能机构,包括左机架、中间机架和右机架;所述左机架、中间机架和右机架为平行且相对设置的3个平板,所述左机架、右机架分别通过支撑螺柱和螺钉平行固定于中间机架的两侧,中间机架上开设的两个通孔分别与右机架上的两个通孔同轴,左机架的中心孔与中间机架、右机架的第一通孔同轴、且3个平板上的通孔位于同一高度;
10.所述离合机构安装于左机架和中间机架之间,包括主动部分和从动部分,所述主动部分包括主动片、棘爪、滚球体、圆柱拉伸弹簧、轴用弹簧挡圈,从动部分包括带轴棘轮;所述主动片为圆盘结构,其一端面的中心处设置有圆柱凸台,另一端面的外缘设置有圆环
凸台、并在端面的对称位置设置有两个圆柱形凸起;所述电机的电机轴依次穿过左机架的中心孔和主动片中心轴处的d形孔,通过安装于电机轴端头处的轴用弹簧挡圈限制轴向位移,由电机驱动主动片旋转,且主动片的圆柱凸台一侧朝向电机;所述棘爪为圆弧结构,其中心处铰接于主动片的圆柱形凸起上,一端为钩头;两个棘爪首尾相接、并位于同一周面上,棘爪另一端分别通过圆柱拉伸弹簧与主动片的圆环凸台内壁连接;两个所述滚球体分别放置在两个棘爪外弧面和主动片的圆环凸台内壁之间,行程在棘爪中心与圆柱拉伸弹簧之间;所述带轴棘轮与主动片同轴,一端为d形截面轴,另一端为棘轮,所述棘轮与两个棘爪的钩头啮合,d形截面轴依次穿过中间机架和右机架的第一通孔,并分别通过轴承连接;
11.所述储能机构与带轴棘轮同轴、安装于中间机架的另一侧,包括平面蜗卷弹簧、u形扣和固定套筒;所述固定套筒的中心处开有d形孔,同轴套装于d形截面轴上;所述平面蜗卷弹簧与固定套筒同轴,其内端固定于固定套筒外周面,外端通过u形扣固定于中间机架上;由所述带轴棘轮带动固定套筒转动,进而实现平面蜗卷弹簧的储能和释放;
12.所述弹跳机构安装于中间机架和右机架之间,包括轴、第一直齿圆柱齿轮、第二直齿圆柱齿轮、第一连杆、第二连杆、第三连杆、第四连杆和支撑座;所述第一连杆的上端与第一直齿圆柱齿轮中心处均开有d形孔,同轴套装于d形截面轴上;所述第一连杆的下端与第二连杆的上端铰接,第二连杆的下端为圆柱齿轮结构,铰接于支撑座上;所述轴的两端分别通过轴承与中间机架、右机架的第二通孔连接,轴向与带轴棘轮的轴向平行;所述第三连杆的上端、第二直齿圆柱齿轮同轴固定于轴上,所述第三连杆的下端与第四连杆的上端铰接,第四连杆的下端为圆柱齿轮结构,铰接于支撑座上,并与第二连杆的圆柱齿轮啮合;所述第二直齿圆柱齿轮与第一直齿圆柱齿轮啮合;由所述带轴棘轮依次带动第一连杆、第一直齿圆柱齿轮、第二直齿圆柱齿轮、轴、第三连杆转动,进而由第一连杆和第三连杆分别带动第二连杆和第四连杆转动,实现整个机构的弹跳。
13.本发明的进一步技术方案是:所述左机架为条形板,所述中间机架为一端是圆形、另一端为y形的平板结构,所述右机架一端为条形、另一端为三角形的平板结构;所述中间机架的圆形端外周面对称设置有两个凸耳,所述左机架的两端分别通过支撑螺柱和螺钉固定于两个凸耳上;所述右机架三角形端外侧的两个顶角分别通过支撑螺柱和螺钉固定于中间机架y形端的端头处,右机架条形端的端头通过支撑螺柱和螺钉固定于中间机架圆形端。
14.本发明的进一步技术方案是:所述主动片的圆环凸台上对称开有两个缺口,分别在缺口处设置有凸起,所述圆柱拉伸弹簧的一端固定于该凸起上,另一端固定于棘爪的另一端。
15.本发明的进一步技术方案是:所述电机的电机轴端头外周面开有环形键槽,用于安装所述轴用弹簧挡圈。
16.本发明的进一步技术方案是:所述中间机架朝向主动片的一侧端面上开有圆环凹槽,内嵌橡胶圈;使得所述橡胶圈与中间机架的第一通孔同轴,且与滚球体接触,用于增大滚球体在行程内滚动的摩擦力。
17.本发明的进一步技术方案是:所述主动片与中间机架为间隙配合,且间隙小于滚球体直径,防治滚球体脱落。
18.本发明的进一步技术方案是:所述棘爪的外弧面中心处设置有半圆形凸起,用于限制滚球体的行程。
19.本发明的进一步技术方案是:所述第二连杆和第四连杆的圆柱齿轮具有相同齿数和模数。
20.本发明的进一步技术方案是:所述第一直齿圆柱齿轮和第二直齿圆柱齿轮具有相同齿数和模数。
21.本发明的进一步技术方案是:所述左机架的中心孔两侧分别开有通孔,与所述电机机身上的定位孔相对设置,通过螺栓依次穿过并将左机架与电机固定。
22.有益效果
23.本发明的有益效果在于:
24.(1)本发明所设计的离合机构能量储存和释放过程是通过棘轮棘爪分离和啮合的方式,不会存在卡齿的现象,解决了缺齿方式储存能量时出现的缺齿齿轮啮入卡齿现象。
25.(2)本发明所设计的离合机构可以通过电机正反转的方式使滚球体在轨道内运动使棘爪棘轮分离和啮合,实现机器人的弹跳和储能,机器人的操控变得简单易行。
26.(3)本发明所设计的离合机构根据电机轴旋转的圈数决定起跳高度,控制弹跳高度的方式变得更加简单稳定。
附图说明
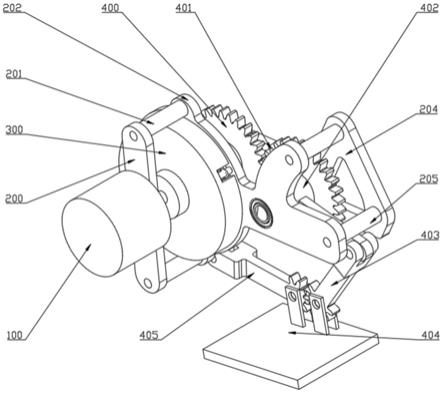
27.图1是本发明的等轴测视图;
28.图2是本发明的俯视图;
29.图3是离合机构爆炸视图;
30.图4是弹跳、储能机构爆炸视图;
31.图5是离合机构主动片部分视图;
32.图6是电机100视图;
33.图7是中间机架202示意图;
34.图8是主动片300示意图;
35.图9是棘爪305示意图;
36.图10是带轴棘轮302示意图;
37.图11是固定套筒502示意图;
38.图12是第一连杆406示意图;
39.图13是第四连杆403示意图;
40.图14是第一直齿圆柱齿轮400示意图;
41.图15是右机架204示意图;
42.图16是支撑座404示意图;
43.图17是u形扣500示意图;
44.图18是轴用弹簧挡圈306示意图;
45.图19是圆柱拉伸弹簧303示意图;
46.图20是支撑螺柱201示意图;
47.图21是左机架200示意图;
48.图22是橡胶圈301示意图;
49.图23是轴407示意图;
50.附图标记说明:100.电机;101.电机轴;102.键槽;103.定位孔;200.左机架;201.支撑螺柱;202.中间机架;203.深沟球轴承;204.右机架;205.角接触球轴承;300.主动片;301.橡胶圈;302.带轴棘轮;303.圆柱拉伸弹簧;304.滚球体;305.棘爪;306.轴用弹簧挡圈;307.u形扣孔;400.第一直齿圆柱齿轮;401.第二直齿圆柱齿轮;402.第三连杆;403.第四连杆;404.支撑座;405.第二连杆;406.第一连杆;407.轴;500.u形扣;501.平面蜗卷弹簧;502.固定套筒。
具体实施方式
51.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
52.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
53.参照图1所示,本发明一种储能可控的自释放弹跳机构,包括电机100、机架、离合机构、弹跳机构和储能机构;所述机架用于安装电机、离合机构、弹跳机构和储能机构,包括左机架200、中间机架202和右机架204;左机架200、中间机架202和右机架204为平行且相对设置的3个平板,左机架200、右机架204分别通过支撑螺柱201和螺钉平行固定于中间机架202的两侧,中间机架202上开设的两个通孔分别与右机架上的两个通孔同轴,左机架200的中心孔与中间机架202、右机架204的第一通孔同轴、且3个平板上的通孔位于同一高度。左机架200的中心孔两侧分别开有通孔,与电机100机身上的定位孔103相对设置,通过螺栓依次穿过并将左机架200与电机100固定。
54.以下所述顺时针、逆时针都是从电机方向正视而规定的方向。
55.参照图1、3、4、5,所述的离合机构包括一个主动片300、橡胶圈301、带轴棘轮302、圆柱拉伸弹簧303、滚球体304、棘爪305、轴用弹簧挡圈306、u形扣孔307。所述的主动片安装在电机轴100上,主动片左侧紧贴电机轴轴肩,右侧通过安装在电机轴端头处的轴用弹性挡圈306轴向固定;主动片300轴心孔为d形孔,与电机轴间隙配合,主动片一侧端面的外缘设置有圆环凸台,将棘爪305、滚球体304、圆柱拉伸弹簧303包围;所述棘爪305铰接在主动片端面的圆柱凸起上,棘爪305尾端开孔;圆柱拉伸弹簧303一端连接棘爪尾端,另一端连接主动片外缘的圆环凸台上;所述滚球体304安装在棘爪外缘和圆柱拉伸弹簧的夹层中,滚球体的运动只能在棘爪尾端到棘爪固定点处;所述橡胶圈301安装在中间机架的圆环凹槽内(参照图7);所述带轴棘轮302的d形轴上依次安装深沟球轴承和角接触轴承,深沟球轴承安装到中间机架的第一通孔中,角接触轴承安装到右机架的第一通孔中;
56.参照图1、4,所述的弹跳机构包括第一直齿圆柱齿轮400、第二直齿圆柱齿轮401、第一连杆406、第二连杆405、第三连杆402、第四连杆403、轴407、支撑座404。所述第一连杆406同第一直齿圆柱齿轮400安装在带轴棘轮上,第一直齿圆柱齿轮400安装在带轴棘轮上,齿轮轴心开d形孔,与带轴棘轮过盈配合,轴伸一侧紧贴右机架204,另一侧紧贴第一连杆;所述第三连杆402同第二直齿圆柱齿轮401安装在轴上,第三连杆402同第二直齿圆柱齿轮
401都为d形孔,轴407为d形轴,轴孔配合为过盈配合,第二直齿圆柱齿轮401有轴伸一侧紧贴右机架204,左侧紧贴第三连杆402,第一直齿圆柱齿轮400和第二直齿圆柱齿轮401为外啮合;第二连杆405和第四连杆403带齿一端铰接在支撑座404上的卡槽内,并且有齿侧为外啮合,另一端分别与第一连杆406、第三连杆402铰接。
57.参照图4,所述储能机构包括u形扣500、平面蜗卷弹簧501、固定套筒502。所述u形扣500安装在中间机架右侧端面,通过螺钉固定;所述平面蜗卷弹簧501紧贴中间机架安装在其右侧,内缘挡钩插到固定套筒502沟槽内,外缘挡钩卡到u形扣中,平面蜗卷弹簧501储能的旋转方向为顺时针;所述固定套筒502安装在带轴棘轮上,轴孔都为d形,配合方式为过盈配合。
58.本发明的工作过程,首先把机器人放置在工作环境中,通过控制系统控制电机100逆时针转动,主动片300跟随电机轴101同步转动,滚球体304沿轨道方向滚向棘爪凸起部分,圆柱拉伸弹簧303将棘爪305尾端拉起,钩头被放下与棘轮啮合,从而带动带轴棘轮302一起顺时针转动;固定套筒502通过外缘的沟槽带动平面蜗卷弹簧顺时针转动储存能量,带轴棘轮302的d形轴上第一连杆406和第一直齿圆柱齿轮400顺时针转动;第二直齿圆柱齿轮401与第一直齿圆柱齿轮外啮合,带动轴407逆时针转动,第一连杆和第三连杆方向相反的运动使得其间夹角增大,同样,第二连杆、第四连杆之间夹角增大,当电机100达到预定起跳高度圈数时,电机100断电,能量储存阶段结束。控制电机100反转,主动片300跟随电机轴101同步转动,滚球体304沿轨道方向滚向棘爪305尾端,圆柱拉伸弹簧303伸长,棘爪305尾端与主动片300外缘间隙逐渐增大,钩头被抬起,棘轮变为自由状态,储存在平面蜗卷弹簧501中的能量被释放,带轴棘轮302、第一连杆406、第二直齿圆柱齿轮400逆时针转动,第一连杆406带动第二连杆405顺时针转动;第一直齿圆柱齿轮400带动第二直齿圆柱齿轮401顺时针转动,轴407上的第三连杆402顺时针转动,带动第四连杆逆时针转动,当平面蜗卷弹簧501能量完全释放,整个机构重新回归能量最低状态,整个弹跳阶段结束。
59.由于跟支撑座连接的连杆端部有缺齿啮合,所以身体姿态在储能和释放过程中是确定的,本设计所提供的图纸只给出一种身体姿态,通过调节第二直齿圆柱齿轮、第一直齿圆柱齿轮的传动比和第一、第二、第三、第四连杆的杆长和角度可以实现不同的身体姿态。
60.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

