1.本发明涉及设置有行进单元以及座椅的载具(vehicle),该座椅通过行进单元经由改变座椅高度的升降单元支撑。
背景技术:
2.jp5922489b公开了一种具有行进单元和座椅的载具,该座椅通过驱动单元经由升降单元支撑。该行进单元设置有驱动轮,在倒摆控制(inverted pendulum control)下驱动该驱动轮。
3.当电池的剩余电量降至某个水平以下或者载具万一发生任何故障时,在jp5922489b中所公开的载具可能会变得无法继续倒摆控制。在这样的情形下,载具乘员必需防止载具翻倒。为了有效地应对这种情况,希望载具设置有支撑腿,该支撑腿在倒摆控制被禁用时防止载具翻倒。为了有效地防止载具翻倒,要求支撑腿延伸得更加远离载具机体。然而,如果支撑腿延伸得更加远离载具,则使载具无法在有限的空间内行进。
技术实现要素:
4.鉴于现有技术的这种问题,本发明的主要目的是,提供一种设置有一个或更多个支撑腿的载具,所述一个或更多个支撑腿可以以稳定的方式支撑载具,而不会过度增加载具的外部轮廓。
5.为了实现这样的目的,本发明提供了一种载具1,该载具包括:载具主架(body frame)2;行进单元3,该行进单元设置在载具主架上并且被配置成在地板表面上行进;座椅4,该座椅由载具主架能竖直移动地支撑;升降单元5,该升降单元设置在座椅与载具主架之间,以使座椅在高位与低位之间移动;以及支撑腿71、72,该支撑腿从座椅大致向下延伸并且被配置成在座椅处于低位时接地,其中,该支撑腿能在被定位得靠近载具主架的缩回位置与被定位得远离载具主架的展开位置之间移动,该支撑腿被配置成在座椅处于高位时处于缩回位置,并且在座椅从高位向低位移动时从缩回位置向展开位置移动。
6.由此,当座椅处于高位(这通常是载具正行进时的情况)时,可以通过将支撑腿置于缩回位置来使载具的外部轮廓最小化。由此,使得载具能够在相对有限的空间内行进。当座椅处于低位(这通常是载具静止或停放时的情况)时,通过将支撑腿置于展开位置来使载具的稳定性最大化。由此,可以以可靠的方式防止载具翻倒。
7.优选地,该支撑腿包括:第一构件75,该第一构件在该第一构件的上端处枢转地连接至座椅,以能在缩回位置与展开位置之间移动;第一接地构件76,该第一接地构件设置在第一构件的下端处并且被配置成以沿着地板表面可移动的方式在地板表面上接地;以及第一偏置构件77,该第一偏置构件将第一构件推向缩回位置,该第一构件被配置成通过从地板表面施加至第一接地构件的反作用力,克服第一偏置构件的偏置力从缩回位置向展开位置移动。
8.由此,当第一接地构件接地时,可以将支撑腿从缩回位置展开到展开位置而无需
任何动力致动器,从而可以简化展开支撑腿的结构。
9.优选地,该支撑腿还包括第一阻尼器83,该第一阻尼器设置在第一构件与座椅之间。
10.由此,可以减少在支撑腿接地时对座椅的冲击和座椅的振动。
11.优选地,该第一构件被定位在载具的前部,并且设置有搁脚板79。
12.由此,可以在第一支撑腿接地时将搁脚板自动地远离载具或者自动地移动至使用位置。
13.优选地,该第一接地构件设置在搁脚板的正下方。
14.由此,可以将支撑乘员的脚的搁脚板的支撑表面定位在尽可能低的位置,以使乘员的就坐舒适性可以最大化。
15.优选地,该支撑腿包括:第二构件86,该第二构件在第二构件的上端处由座椅枢转地支撑,以能在缩回位置与展开位置之间移动;第二接地构件87,该第二接地构件设置在第二构件的下端处并且被配置成以沿着地板表面可移动的方式在地板表面上接地;第三构件88,该第三构件在第三构件的上端处由第二构件的中间部分枢转地支撑,并且在载具主架与第二构件之间限定的空间中向下延伸;第三接地构件89,该第三接地构件设置在第三构件的下端处并且被配置成以沿着地板表面可移动的方式在地板表面上接地;以及第二偏置构件91,该第二偏置构件将第三构件的下部远离载具主架向下推进。
16.由此,当第二接地构件和第三接地构件接地时,可以将支撑腿从缩回位置展开到展开位置而无需任何动力致动器,从而可以简化展开支撑腿的结构。
17.优选地,该第二接地构件包括第二辊,该第二辊由第二构件能旋转地支撑,并且该第三接地构件包括第三辊,该第三辊具有比第二辊大的直径并且由第三构件能旋转地支撑。
18.由于在第二辊之前接地的第三辊具有比第二辊大的直径,因此,支撑腿可以以特别稳定的方式接地。
19.优选地,该支撑腿还包括第二阻尼器94,该第二阻尼器设置在第三构件与座椅之间。
20.由此,可以减少在支撑腿接地时对座椅的冲击和座椅的振动。
21.优选地,该行进单元设置有驱动轮8,在倒摆控制下驱动该驱动轮。
22.由此,本发明提供了一种设置有一个或更多个支撑腿的载具,所述一个或更多个支撑腿可以以稳定的方式支撑载具,而不会过度增加载具的外部轮廓。
附图说明
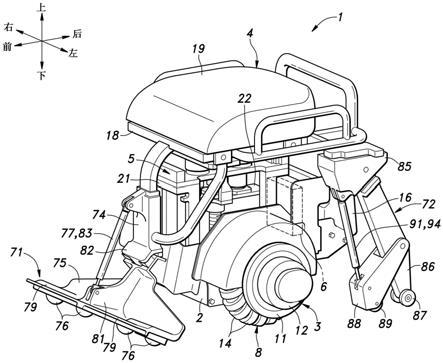
23.图1是根据本发明的载具在座椅处于低位时的前立体图;
24.图2是载具在座椅处于低位时的后立体图;
25.图3是载具在座椅处于低位时的侧视图;
26.图4是升降单元的立体图;
27.图5是升降单元的截面图,其中可移动构件处于基准位置,并且座椅处于低位;
28.图6是升降单元的截面图,其中可移动构件处于基准位置,并且座椅处于高位;
29.图7是升降单元的截面图,其中可移动构件处于降低位置,并且座椅处于低位;
30.图8是示出在可移动构件处于降低位置时的接合装置的状态的图;
31.图9是示出在可移动构件即将从降低位置升高时的接合装置的状态的图;以及
32.图10是载具在座椅处于高位时的左侧视图。
具体实施方式
33.下面,参照附图,对如应用于倒摆载具的本发明的优选实施方式进行描述。
34.如图1至图3中所示,载具1设置有:载具主架2;行进单元3,该行进单元支撑载具主架2并且使载具主架2在地板上沿任何希望方向行进;座椅4,该座椅由载具主架2支撑并且被配置成使载具乘员就座;升降单元5,该升降单元设置在载具主架2与座椅4之间;以及控制单元6,该控制单元控制行进单元3和升降单元5。
35.在这个实施方式中,行进单元3包括被置于载具主架2的两侧的一对驱动轮8。对于该对驱动轮8中的各个驱动轮,行进单元3还包括:一对驱动盘11,该对驱动盘由载具主架2支撑,以通过相应的电动机(图中未示出)绕横向延伸的旋转中心线单独且旋转地驱动;以及多个驱动辊(图中未示出),所述多个驱动辊绕各个驱动盘的旋转中心线布置在各个驱动盘11上,从而各个驱动辊均能绕倾斜的旋转中心线自由旋转。
36.各个驱动轮8均设置有多个从动辊,所述多个从动辊由环构件13能旋转地支撑(就像串珠一样),并且驱动辊抵压着从动辊。随着驱动盘11的转动,驱动轮8通过驱动辊与从动辊之间的配合而被摩擦驱动。
37.当两个驱动盘11以相同的转速沿相同的方向转动时,驱动轮8沿与驱动盘11相同的方向旋转。当两个驱动盘11之间的旋转方向或转速存在差异时,驱动轮8的从动辊14相对于环构件13旋转。结果,驱动轮8生成横向牵引力,以使载具受到横向推进力。因此,载具1能够沿任何希望方向行进。有关行进单元3的结构的细节,参见us9,061,721b2以及其它关联的在先专利公报。
38.电池16被安装在载具主架22的后端部上,并且控制单元6被安装在载具主架2的内部或后部上。
39.升降单元5被配置成在低位与高位之间升高和降低座椅4。座椅4包括:由升降单元5支撑的座椅架(seat frame)18;以及被置于座椅架18的顶部上的垫子19。乘员可以坐在垫子19上。座椅4的高位可以处于座椅4的低位的正上方。另选地,座椅4的高位可以偏移至座椅4的低位的横侧或者或前后侧。
40.如图4和图5所示,升降单元5包括被固定地附接至载具主架2的固定基部21。固定基部21包括:具有水平延伸板状的横构件32;以及一对形状相同的竖构件31,该对竖构件分别从横构件32的前端部和后端部竖直向下延伸。各个竖构件31均设置有字母u的形状,并且限定了沿前后方向延伸穿过竖构件31的开口31a。
41.升降单元还包括:可移动基部22,该可移动基部以竖直可移动的方式被置于固定基部21的横构件32的正下方(如下文中将讨论的);一对接合装置23,该对接合装置被配置成将可移动基部22选择性地保持在相对于固定基部21的预定基准位置处;以及电动升降机构24,该电动升降机构被配置成相对于可移动基部22升高和降低座椅4。在这个实施方式中,接合装置23被配置成选择性地将可移动基部22的前端和后端分别接合至固定基部21。电动升降机构24设置有:座椅基部26,该座椅基部设置在固定基部21上方,以使能相对于固
定基部21和可移动基部22竖直移动;电动机27,该电动机被安装在座椅基部26上,并且具有从该座椅基部向下延伸的输出轴27a;螺杆轴28,该螺杆轴经由联轴器38连接至输出轴27a;以及螺母29,该螺母被固定地固定至可移动基部22并且与螺杆轴28经螺纹连接。座椅4固定地附接至座椅基部26。因此,螺杆轴28竖直延伸,并且经由螺母29穿过可移动基部22。
42.各个竖构件31的下端设置有沿前后方向延伸的通孔,并且经由沿前后方向延伸的螺栓销31b能枢转地连接至载具主架2的向上延伸的部件。因此,包括竖构件31和横构件32的固定基部21被载具主架2的一部分保持而防止前后移动,但是能绕螺栓销31b枢转。固定基部21的横向枢转移动通过止挡件(尽管图中未示出)限制在一定角度范围内。固定基部21通常在倒摆控制下维持竖立姿势。可以通过乘员沿向前或向后方向倾斜来沿前后方向推进载具1,并且可以通过乘员沿任一方向侧向倾斜沿横向方向推进载具。
43.横构件32设置有;中央开口32a;以及一对第一滑动衬套32b,其中一个第一滑动衬套处于中央开口32a的前面,另一个第一滑动衬套处于中央开口32a的后面。
44.一对导杆34从座椅基部26竖直向下延伸,并且均能滑动地穿过对应的第一滑动衬套32b,以使座椅基部26能以被引导的方式相对于固定基部21的横构件32竖直地移动。橡胶缓冲垫36可以设置在座椅基部26的下表面或者横构件32的上表面上。在这个实施方式中,在第一滑动衬套32b的上端处设置有橡胶缓冲垫36,导杆34穿过该橡胶缓冲垫36。座椅基部26相对于横构件32的下限位置通过座椅基部26的下表面抵接橡胶缓冲垫36来限定。
45.可移动基部22具有水平延伸板状,并且设置有一对第二滑动衬套22a,其中一个第二滑动衬套处于螺母29的前面,另一个第二滑动衬套处于螺母29的后面,从而与第一滑动衬套32b相对应。导杆34类似地分别穿过第二滑动衬套22a。导杆34的下端通过下构件37彼此连接。结果,当从横向方向看时,导杆34、座椅基部26以及下构件37形成矩形框架。螺杆轴28的下端以可自由旋转但轴向固定的方式连接至下构件37。一对止挡件40从下构件37的上表面向上突出,其中一个止挡件处于螺杆轴28的前面,另一个止挡件处于螺杆轴28的后面。如图6所示,下构件37和座椅基部26相对于可移动基部22的上限位置由与可移动基部22的下表面抵接的止挡件40的上端来限定。因此,座椅基部26能在通过止挡件40抵接可移动基部22的下表面所限定的和对应于座椅4的高位的高位与通过座椅基部26抵接固定基部21的横构件32的上表面所限定的对应于座椅4的低位的低位之间竖直地移动。
46.如图4和图5所示,在可移动基部22被保持在基准位置的同时,当通过电动机27使螺杆轴28沿反方向转动时,借助于螺杆轴28和螺母29之间的配合,使座椅基部26与电动机27一起相对于固定基部21升高。电动机27的输出轴27a、螺杆轴28以及导杆34彼此平行地布置。电动机27集成有磁力制动器,在电动机27的运行期间停用该磁力制动器,而在没有向该电动机供应电流时启用该磁力制动器。因此,当将电流供应给电动机27时,电动机27能够提供输出转矩,但是当没有向电动机27供应电力时,即使在外部扭矩下,也防止了输出轴27a旋转。
47.在这个实施方式中,座椅基部26经由橡胶缓冲垫39连接至座椅架18,以增强座椅4的就座舒适性。为了空间利用效率,电动机27的上部位于座椅4的内部。
48.可移动基部22的螺母29优选地由具有相对小的摩擦的滚珠螺杆构成。
49.如图8和图9所示,各个接合装置23均包括:钩状接合件41,该接合件可以在接合位置与释放位置之间沿大致水平方向移位;偏置构件42,该偏置构件将接合件41推向释放位
置;以及电磁体43(保持装置),该电磁体克服偏置构件42的偏置力将接合件41保持在接合位置。前接合装置23和后接合装置23被配置成彼此对称的。为了避免冗长,下面仅描述前接合装置23。
50.钩状接合件41的基端或柄部绕沿水平方向延伸的旋转中心线能旋转地由固定基部21的前端部支撑。接合件41被弯曲成沿前后方向面向该接合件的凸侧。
51.突出件46设置在接合件41的基端处,并且从该接合件的旋转中心沿径向向外延伸得远离钩状接合件41的柄部。突出件46向上延伸穿过形成在横构件32中的通孔32c,并且在横构件32上方突出。铁块47附接至突出件46的前侧,并且电磁体43在突出件46的正前方附接至横构件32的上表面。因此,接合件41可以在其中铁块47抵接电磁体43的第一位置(接合位置)与铁块47与电磁体43间隔开的第二位置(释放位置)之间旋转。当接合件41处于第一位置时,电磁体43可以将铁块47能分开地保持至该电磁体。
52.接合件41设置有从钩状接合件41的柄部分支出的支臂49。支臂49从接合件41的柄部向后延伸,从而与接合件41的梢端协作地形成延伸的嘴。特别地,支臂49大致平行于接合件41的梢端延伸,以便在支臂49与接合件41的梢端之间限定空间。因此,当钩部处于释放位置时,支臂49延伸至从接合件41的梢端向上移位并且与可移动基部重叠的点。特别地,至少在接合件处于脱离位置时,支臂49延伸超过连接接合件41的旋转中心线和接合件41的梢端的直线。
53.辊51能旋转地设置在接合件41的梢端处,并且另一辊50设置在支臂49的自由端处。这些辊50、51的旋转中心线与接合件41的旋转中心线平行地延伸。
54.通过偏置构件42将接合件41推向释放位置。在这个实施方式中,偏置构件42由扭力螺旋弹簧构成,该扭力螺旋弹簧绕接合件41的枢轴销穿过,以作用在固定基部21与接合件41之间。电磁体43被配置成通过吸引接合件41的铁块47而将接合件41保持在接合位置。
55.如图8所示,当接合件41处于释放位置时,接合件41和支臂49朝着梢端侧向下倾斜。在释放位置,当从上方观察时,支臂49与可移动基部22重叠,而接合件41与可移动基部22不重叠。换句话说,当接合件41处于释放位置时,接合件41与可移动基部22脱离。这时,铁块47的位置远离电磁体43。优选地由诸如橡胶的软材料制成的止挡件52附接至接合件41的柄部的前侧。在释放位置,止挡件52接触横构件32的下表面。换句话说,通过使止挡件52抵接到横构件32的下表面上来限定接合件41的释放位置。
56.如图9所示,当接合件41处于接合位置时,接合件41的梢端和支臂49均大致水平地定位。在接合位置,当从上方观察时,支臂49和接合件41均与可移动基部22重叠。换句话说,当接合件41处于接合位置时,接合件41可以接合可移动基部22以防止向下移动。当接合件41处于接合位置时,在接合件41的梢端处的辊51的旋转中心线可以位于接合件41的旋转中心线的正下方。当接合件41处于接合位置时,铁块47与电磁体43接触并被电磁体43保持着。
57.当将电流供应给电磁体43时,电磁体43吸引铁块47,以使接合件41克服偏置构件42的弹簧力而保持在接合位置。当终止将电流供应给电磁体43时,接合件41在偏置构件42的偏置力作用下移动至释放位置。
58.如图9所示,通过由接合装置23进行接合,可以将可移动基部22保持在基准位置。当可移动基部22处于基准位置并且接合件41处于接合状态时,通过接合件41的梢端经由辊51将可移动基部22保持在基准位置。这时,接合件41的梢端位于可移动基部22的正下方,并
且经由辊51抵接可移动基部22的下表面。这时,在可移动基部22的上表面与支臂49的梢端处的辊50之间形成间隙。按这种方式,一旦接合,接合件41就接合可移动基部22以防止竖直移动,并且将可移动基部22保持在前述基准位置。各个接合件41与可移动基部22之间的接触区域位于接合件41的旋转中心线的正下方。
59.下面描述该载具1的操作模式。控制单元6控制接合装置23的电磁体43和电动机27的操作,以使升降单元5可以根据需要升高和降低座椅4。
60.图5示出了其中可移动基部22被保持在基准位置并且座椅4处于低位的初始状态。这是载具1处于停放时的典型状况。当载具乘员坐在座椅4上时,控制单元6通过使电动机27沿反方向转动而将座椅4升高到高位。由此,载具乘员可以从高视角观看周围环境。图6示出了处于高位的座椅4。
61.当载具乘员希望从载具1下来时,控制单元6通过使电动机27沿正方向转动而将座椅4降低到低位。由此,载具乘员可以容易地从座椅4下来。
62.当载具1正在以如图5所示的座椅4处于高位的状态下行进时,可能发生紧急情况,其中载具1可能无法维持竖立姿势,要不然就是要求载具乘员尽快从座椅下来。在这样的情形下,需要尽快降低座椅4。否则,要求载具乘员由相对较高的位置从载具1下来会变得不方便。
63.在这样的情况下,当检测到紧急情况时,控制单元6停止向电磁体43供应电力,以使接合件41在偏置构件42的偏置力作用下从接合位置移动至释放位置。结果,可移动基部22与座椅4一起因重力而下降。由于这是自由落体,因此,座椅4的下降会非常迅速地发生,不需要任何外部电源。
64.这时,座椅基部26和下构件37(通过导杆34和螺杆轴28彼此连接)也与可移动基部22(经由螺杆轴28和螺母29连接至座椅基部26)一起下降。可移动基部22下降直到座椅基部26经由橡胶缓冲垫36与横构件32接触。图7示出了这种状态。结果,座椅4被置于竖直移动范围内的最低位。可以通过调节第一滑动衬套32b与导杆34之间的摩擦来调节可移动基部22的下降速度。
65.可以以下面的方式将座椅4从该最低位升高。在接合装置23处于释放位置的情况下,使电动机27沿正方向转动,结果因螺杆轴28与螺母29之间的配合而使可移动基部22升高。
66.随着电动机27沿正方向转动以使可移动基部22朝着基准位置升高,可移动基部22的上表面最终克服偏置构件42的弹簧力向上推动支臂49,从而使接合件41从释放位置移位到接合位置。结果,接合件41的梢端位于可移动基部22的下方。一旦接合件41到达接合位置,铁块47就接触相应的电磁体43,并且接合件41的旋转终止。结果,可移动基部22的移动受到支臂49的限制,并且施加给电动机27的负载增加。然后,控制单元6基于这种负载的增加而停止电动机27的正向旋转。同时,控制单元6将电流供应给电磁体43,以使铁块47保持附接至相应的电磁体43。结果,将接合件41和铁块47保持在接合位置。另选地,控制单元6可以在接合件41到达接合位置之前开始向电磁体43供应电流。
67.在停止电动机27的正向旋转之后,控制单元6使电动机27的旋转反向。结果,可移动基部22开始相对于座椅基部26和固定基部21向下移动,如图9所示。这时,在可移动基部22在支臂49与接合件41之间向下移动的时间期间,施加至电动机27的负载比较小。一旦可
移动基部22的下表面与接合件41相接触,电动机27上的负载就因可移动基部22的向下移动受到接合件41的抵抗而开始增加。因此,控制单元6能够通过检测电动机27的负载的增加来确定可移动基部22已经到达基准位置。
68.以这种方式,一旦可移动基部22到达基准位置,控制单元6就可以通过使电动机27的旋转反向来使座椅基部26和座椅4相对于可移动基部22和固定基部21升高。
69.载具1具有至少一个支撑腿,以即使在倒摆控制关闭的情况下也将载具1保持在竖立姿势。在该实施方式中,如图1至图3以及图10中所示,载具1具有三个支撑腿71和72,当座椅4处于低位时,这三个支撑腿71和72从座椅4向下延伸并接触地板表面。这三个支撑腿71和72由在载具1的前端部居中定位的一个前支撑腿71以及位于载具1的后部的两侧的一对后支撑腿72组成。支撑腿71和72均在该支撑腿的上端部处能枢转地进行支撑,以能在支撑腿朝着载具1枢转的缩回位置与支撑腿远离载具1枢转的展开位置之间移动。在这个实施方式中,前支撑腿71被配置成在从缩回位置向展开位置移动时向前枢转,并且后支撑腿72被配置成在从缩回位置向展开位置移动时向后枢转。当座椅4从高位向低位移动时,支撑腿71和72从缩回位置向展开位置移动,并且在支撑腿71和72的下端处接地。
70.如图1所示,座椅4设置有前支撑部74,该前支撑部从座椅架18的前端居中地向前然后向下延伸,并且前支撑腿71从前支撑部74的下端部向下延伸。至少一个加强构件可以连接在前支撑部74的下端与座椅架18之间。前支撑部74可以形成为座椅架18的一部分。前支撑腿71包括:第一构件75,该第一构件在第一构件的上端处连接至前支撑部74,以能绕横向延伸的旋转中心线枢转;多个第一辊76(第一接地构件),所述多个第一辊设置在第一构件75的下端处;以及第一偏置装置77,该第一偏置装置设置在第一构件75与前支撑部74之间,以将第一构件75推向与缩回位置相对应的位置。
71.第一构件75的下端设置有搁脚板79,该搁脚板形成为搁架,该搁架大致在载具的整个宽度上横向地延伸并且向前突出以支撑乘员的脚。因此,在该实施方式中,当从横向方向观察时,搁脚板79具有l状的横截面。搁脚板79设置有在搁脚板的下端处向前突出的耳轴座81,以能枢转地支撑第一偏置装置77的下端。第一偏置装置77的上端能枢转地连接至前支撑部74的竖直中间部分。
72.可以使第一构件75在其中第一构件75大致竖直地从前支撑部74悬挂(如图10所示)的缩回位置与其中第一构件75从缩回位置向前升高一定角度(10度到45度)的展开位置之间枢转。在前支撑部74的下端部处设置有止挡件82,以限定第一构件75在缩回位置向后枢转的极限。止挡件82可以设置有诸如橡胶的缓冲构件。通过使第一构件75从缩回位置摆动到展开位置,第一构件75的下端远离载具主架2或者大致沿水平方向向前移动。
73.第一辊76由搁脚板79支撑。在这个实施方式中,第一辊76包括在搁脚板正下方以规则间隔横向地布置的四个辊。所述第一辊76中的外侧两个第一辊的直径可以比所述第一辊76中的内侧两个第一辊的直径稍大。第一辊76可以由具有横向延伸的旋转中心线的简单辊、脚轮辊或球辊组成。第一辊76的数量可以不是四个,而是少于或多于四个,甚至可能是一个。
74.第一偏置装置77可以包括通常沿延伸方向偏置的可线性伸出的缸。第一偏置装置77可以由气弹簧或弹簧加载装置组成。第一偏置装置77还可以包括扭力弹簧,该扭力弹簧设置在前支撑部74与第一构件75之间的接合点处。
75.如图10所示,在没有任何外力的情况下,通过第一偏置装置77将第一构件75推向缩回位置。如图1至图3中所示,当第一构件75的下端经由第一辊76通过从地板表面接收的反作用力向上推动时,第一构件75克服第一偏置装置77的偏置力从缩回位置向上摆动到展开位置。特别地,第一构件75的下端沿着地板表面向前移动,并且前支撑腿71被置于展开位置。换句话说,当第一构件75的下端响应于座椅4的降低而经由第一辊76被地板表面向上推动时,第一构件75经由第一辊76被地板表面向上推动,并且枢转到与展开位置相对应的位置。
76.前支撑腿71可以设置有第一阻尼器83,该第一阻尼器被定位在第一构件75与前支撑部74(或座椅4)之间,以阻尼第一构件75相对于座椅4的移动。第一阻尼器83可以由流体阻尼器组成,该流体阻尼器具有其中封闭有流体的缸、能相对于该缸移动的活塞以及连接至该活塞的杆。第一阻尼器83可以与第一偏置装置77一体地形成。如果第一偏置装置77由气弹簧组成,则该气弹簧也可以用作第一阻尼器83。在其它的实施方式中,第一阻尼器83可以包括旋转阻尼器,该旋转阻尼器设置在前支撑部74与第一构件75之间的接合点处。
77.如图1和图2所示,后支撑腿72从座椅4的后部的任一横向外侧部分向下延伸。座椅4设置有从座椅架18的后端的任一侧端向下突出的一对后支撑件85。后支撑件85可以形成为座椅架18的一部分。后支撑腿72设置有相同的构造,并且由对应的后支撑件85支撑。在下面的描述中,为了避免冗长,仅描述了后支撑腿72中的一个后支撑腿。
78.各个后支撑腿72均包括:第二构件86,该第二构件在该第二构件的上端处能枢转地连接至座椅4;第二辊87(第二接地构件),该第二辊设置在第二构件86的下端处并且被配置成接触地板表面;第三构件88,该第三构件在该第三构件的上端处能枢转地连接至第二构件86的中间部分;第三辊89(第三接地构件),该第三辊设置在第三构件88的下端处并且被配置成接触地板表面;以及第二偏置装置91,该第二偏置装置设置在第三构件88的下端部与座椅4之间,以沿向下和向后的方向推动第三构件88,从而将第二构件86推向与缩回位置相对应的位置。第三构件88相对于第二构件86设置成使得第三构件88位于第二辊87的前头,或者在载具主架2与第二构件86之间限定的空间中延伸。
79.如图3和图10所示,第二构件86的上端连接至后支撑件85,以能在其中第二构件86从后支撑件85大致竖直地悬挂的缩回位置与其中第二构件86绕该第二构件的旋转中心线相对于后支撑件85向后倾斜的展开位置之间,绕横向延伸的旋转中心线枢转。在后支撑件85上设置有止挡件93,以将第二构件86的向后枢转移动限制到展开位置。止挡件93可以设置有诸如橡胶的缓冲构件。随着第二构件86从缩回位置向展开位置摆动,第二构件86的下端大致沿水平方向远离载具主架2或者向后移动。第二辊87支撑在第二构件86的下端处,以能绕横向延伸的旋转中心线旋转。第二辊87可以是能移动地接地到地板表面上的任何构件,并且例如可以被球或滑板(sled)代替。
80.第二偏置装置91可以包括可线性伸出和缩回的缸,并且通常沿延伸方向推进。
81.第二偏置装置91可以是气弹簧或弹簧加载缸。第二偏置装置91具有:能枢转地连接至对应的后支撑件85的上端;以及能枢转地连接至第三构件88的前下端部的下端。第二偏置装置91的上端定位在第二构件86的上端的前方的一定距离处。结果,后支撑件85、第二构件86、第三构件88以及第二偏置装置91形成四连杆机构,该四连杆机构可使第二偏置装置91伸出和缩回。
82.如图10所示,当没有负载施加至第二辊87或第三辊89与地板表面间隔开时,第二偏置装置91完全伸出,以使第二构件86从后支撑件85大致竖直地悬挂,并且第三构件88也从第二构件86大致竖直地悬挂。因此,四连杆机构处于大致塌缩状态。换句话说,使第三构件88与第二偏置装置91之间的角度最小化,并且使第二构件86与第三构件88之间的角度最大化。在该缩回位置,第二构件86被置于向前位置,即,接近载具主架2的位置。这样,通过第二偏置装置91将第二构件86推向缩回位置,并且由此将后支撑腿72置于缩回位置。
83.在后支撑腿72的缩回位置,第三辊89位于第二辊87的下方。第三辊89的直径大于第二辊87的直径。第三辊89可以是可以以水平可移动的方式接地的任何其它组件,诸如球或滑板。
84.如图3和图10所示,当由于座椅4的降低而使第三构件88经由第三辊89抵着地板表面推动时,第三构件88向前枢转。同时,第二构件86被第三构件88推动,以向后摆动到对应于后支撑腿72的展开位置的位置,从而使第二辊87接地。更具体地,当第三构件88的下端经由第三辊89被地板表面向上推动时,第二偏置装置91缩回,并且使第三构件88的上端向后移动。这使第二构件86相对于后支撑件85向后枢转,以使第二构件86的下端向后移动。结果,第二构件86的下端与第三构件88的下端之间的距离增加,第二构件86的下端与载具主架2之间的距离同样。这时,第二构件86的下端经由第二辊87搁在地板上,并且第三构件88的下端经由第三辊89搁在地板上。这样,第二构件86向后移动,直到后支撑腿72被置于展开位置。
85.后支撑腿72设置有第二阻尼器94,该第二阻尼器连接在第二构件86与座椅4之间,以阻尼第二构件86相对于座椅4的振荡移动和冲击移动。第二阻尼器94可以是流体阻尼器,该流体阻尼器包括其中封闭有流体的缸、能相对于该缸移动的活塞以及连接至该活塞的杆。第二阻尼器94可以形成为第二偏置装置91的组成部分。如上所述,如果第二偏置装置91是气弹簧,则该气弹簧也可以用作第二阻尼器94。在本实施方式中,第二阻尼器94与第二偏置装置91一体地形成,并且在该第二阻尼器的一端处连接至后支撑件85,并且在第二阻尼器的另一端处连接至第三构件88。另选地,第二阻尼器94可以由旋转阻尼器组成,该旋转阻尼器设置在后支撑件85与第二构件86之间的接合处或者第二构件86与第三构件88之间的接合处。类似地,第二偏置装置91可以由扭力弹簧组成,该扭力弹簧设置在后支撑件85与第二构件86之间的接合处或者第二构件86与第三构件88之间的接合处。
86.如图10所示,当座椅4处于高位时,前支撑腿71从地板表面升高,并且在第一偏置装置77的偏置力作用下被置于缩回位置。同样,后支撑腿72从地板升高,并且在第二偏置装置91的弹簧力作用下被置于缩回位置。
87.当将座椅4降低到低位时,前支撑腿71经由第一辊76通过从地板表面接收的反作用力推动,并因此,克服第一偏置装置77的偏置力从缩回位置过渡到展开位置。后支撑腿72也经由第三辊89通过从地板表面接收的反作用力推动,并因此,克服第二偏置装置91的偏置力从缩回位置过渡到展开位置。这时,前支撑腿71的移动通过第一阻尼器83进行阻尼,并且后支撑腿72的移动通过第二阻尼器94进行阻尼,以使对座椅4的向下移动进行阻尼。
88.在前支撑腿71的展开位置,与地板表面接触的第一辊76与在缩回位置相比被定位得更远离载具主架2,由此提高了载具1的稳定性。类似地,在后支撑腿72的展开位置,与地板表面接触的第二辊87与在缩回位置相比被定位得更远离载具主架2,从而提高了载具1的
稳定性。
89.在本实施方式中,当需要尽快降低座椅4时,控制单元6停止向电磁体43供应电流。结果,铁块47在偏置构件42的偏置力作用下与电磁体43分开,以使接合件41的辊51远离可移动基部22的下表面。结果,可使可移动基部22在重力作用下相对于固定基部21向下移动,以将座椅4置于低位。由于可移动基部22与座椅基部26一起向下移动是作为自由落体发生的,因此,可以使座椅4迅速降低,以满足紧急情况下的需要。当橡胶缓冲垫39抵接座椅基部26的下表面时,可移动基部22的向下移动终止。这时的冲击被橡胶缓冲垫39的变形吸收。
90.在本实施方式中,由于可以在不涉及电动升降机构24的情况降低座椅4,因此,在紧急情况下座椅4的降低可以以迅速且可靠的方式执行。由于接合件41的移位方向和可移动基部22的移位方向彼此正交,因此,使得电磁体43能够以相对较小的功率将接合件41维持在接合状态。换句话说,可以减少电磁体43的功率需求。而且,由于可移动基部22的负载相对于接合件41的旋转中心线沿径向方向施加至接合件41的梢端,因此,可以减小要由电磁体43产生以将铁块47保持在接合状态的力。结果,可以使电磁体43的功耗最小化。
91.当希望将座椅4恢复到高位时,使电动机27沿正方向转动,并且重新开始向电磁体43供应电流。由于螺杆轴28与螺母29的螺纹连接,因此,可移动基部22向上升高,直到可移动基部22抵接支臂49的辊50。随着可移动基部22进一步升高,接合件41以使铁块47与对应的电磁体43相接触的方式枢转。结果,接合件41的辊51被置于与可移动基部22重叠的关系下。因此,使接合件41回到接合位置,由此可移动基部22牢固地接合至固定基部21。在该过程期间,座椅4仍保持在低位。
92.如果控制单元6这时沿反方向启用电动机27,则由于可移动基部22牢固地接合至固定基部21,因此,座椅基部26与座椅4一起相对于载具主架2升高,直到设置在下构件37上的止挡件40抵接可移动基部22的下表面为止。结果,座椅4采取高位。
93.当希望座椅4缓慢地或者逐渐地从高位降低时,电动机27沿正方向转动,从而可以借助于螺杆轴28与螺母29之间的配合使座椅基部26与座椅4一起降低,直到座椅基部26的下表面抵接橡胶缓冲垫36为止。因此,升降单元5从图6所示的状态过渡到图5所示的状态。
94.在本实施方式中,当座椅4处于高位时,支撑腿71和72均处于缩回位置,从而防止支撑腿从载具1的外部轮廓突出,并且能够使载具1在有限的空间内行进。当座椅4处于低位时,支撑腿71和72均处于展开位置,从而可以使载具1在地板表面上的稳定性最大化。由于支撑腿71和72因与地板表面的接触而从缩回位置改变成展开位置,因此,不需要驱动装置来进行这种改变。因此,可以简化并小型化支撑腿71和72的结构。
95.由于支撑腿71和72配备有阻尼器83和94,因此,可以减少在支撑腿71和72因与地板表面接触而从缩回位置向展开位置移位时对坐在座椅4上的乘员的冲击。
96.搁脚板79设置在第一构件75上,以能与第一构件75一起在缩回位置与展开位置之间移位。因此,当前支撑腿71处于展开位置时,为了方便乘员,使搁脚板79适当地向前移动。另外,由于搁脚板79在前支撑腿71的展开位置经由第一辊76接地,因此,使乘员的脚底定位在地板表面附近,以使乘员可以以舒适的方式稳定他或她的姿势。
97.后支撑腿72均设置有彼此分叉的第二构件86和第三构件88,并且在分别设置于第二构件的下端处的第二辊87以及第三构件的下端处的第三辊89处接地。因此,后支撑腿72可以以稳定的方式将载具1支撑在地板表面上。另外,由于第三辊89在第二辊87接触地板表
面之前先接触地板表面,并且第三辊89的直径大于第二辊子87的直径,因此,后支撑腿72可以以良好的稳定性接触地板表面。
98.本发明已经按照具体实施方式进行了描述,但是不受这样的实施方式所限制,并且可以在不脱离本发明的范围的情况下以各种方式进行修改。
99.支撑腿71和72的数量不限于三个,而是在不脱离本发明范围的情况下,也可以有其它的排布结构。例如,可以在前面或者在后面仅有一个腿;可以有两个腿,其中一个腿在载具的前面而另一个腿在载具的后面;等等。
100.可以将第一辊76、第二辊87以及第三辊89替换成可以在地板表面上接地并且能沿着地板表面移动的其它组件。第一辊76、第二辊87以及第三辊89也可以是能旋转地设置在搁脚板79、第二构件86以及第三构件88中的球,或者被固定至这些构件以充任滑板的弯曲表面。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

