1.本技术涉及机器人技术领域,特别涉及一种基于差动机构的机器人腿部和四足机器人。
背景技术:
2.四足机器人近几年逐渐成为国内外学者研究的热点,目前的四足机器人腿部机构驱动主要是通过关节直驱方式,该方法控制系统较为简单可靠,但是膝关节电机成为髋关节电机的负载,整体结构冗余累赘。因而,在四足机器人腿部机构设计中,要设计所需驱动电机输出力矩最小化的腿部机构是难点所在。
3.因此,需要提供一种针对上述现有技术不足的改进技术方案。
技术实现要素:
4.本技术的目的在于提供一种基于差动机构的机器人腿部和四足机器人,以解决或缓解上述现有技术中存在的问题。
5.为了实现上述目的,本技术提供如下技术方案:
6.本技术提供了一种基于差动机构的机器人腿部,包括:第一驱动单元、第二驱动单元、第一驱动轮、第一从动轮、第二驱动轮和第二从动轮;所述第一驱动轮与所述第二驱动轮并列设置,所述第一驱动轮与髋关节转轴转动连接,所述第二驱动轮安装于所述髋关节转轴上,其中,所述髋关节转轴转动安装于所述腿部的髋关节处;所述第一从动轮与所述第二从动轮并列设置,且均通过膝关节转轴转动安装于所述腿部的膝关节处;所述第一从动轮与所述腿部的大腿固定连接,所述第二从动轮与所述腿部的小腿固定连接;其中,所述膝关节转轴转动安装在所述腿部的膝关节处;所述第一驱动单元和所述第二驱动单元均安装于所述大腿上,所述第一驱动单元能够通过所述第一驱动轮带动所述第一从动轮转动,以驱动所述大腿绕所述髋关节转轴摆动;所述第二驱动单元能够通过所述第二驱动轮带动所述第二从动轮转动,以驱动所述小腿绕所述膝关节转轴摆动,且所述小腿的摆动方向与所述大腿的摆动方向相反。
7.可选地,在本技术的任一实施例中,所述第二驱动轮和所述第二从动轮通过第二传动钢丝绳传动连接,且所述第二驱动轮和所述第二从动轮的转动方向相反。
8.可选地,在本技术的任一实施例中,所述第二传动钢丝绳以∞形式绕于所述第二驱动轮和所述第二从动轮上。
9.可选地,在本技术的任一实施例中,所述第一驱动轮和所述第一从动轮通过第一传动钢丝绳传动连接,且所述第一驱动轮和所述第一从动轮的转动方向相同。
10.可选地,在本技术的任一实施例中,所述第二驱动轮与所述髋关节转轴一体成型;和/或,所述第二从动轮与所述小腿一体成型。
11.可选地,在本技术的任一实施例中,所述第一从动轮与所述大腿一体成型。
12.可选地,在本技术的任一实施例中,所述第一驱动单元和/或所述第二驱动单元位
于所述髋关节处。
13.可选地,在本技术的任一实施例中,所述第一驱动单元和所述第二驱动单元均为无框电机。
14.可选地,在本技术的任一实施例中,所述第一驱动单元和所述第二驱动单元叠套同轴安装。
15.本技术实施例还提供一种四足机器人,包括:前肢和后肢,所述前肢和所述后肢沿所述机器人的前后方向连接于所述机器人的躯干上,所述前肢和所述后肢分别具有两个上述任一实施例所述的基于差动机构的机器人腿部,所述前肢的两个所述腿部、所述后肢的两个所述腿部均分别沿所述机器人的左右方向对称布置在所述机器人的躯干两侧。
16.与最接近的现有技术相比,本技术实施例的技术方案具有如下有益效果:
17.本技术提供的技术方案中,第一驱动轮与髋关节转轴转动连接,第一从动轮通过膝关节转轴转动安装在膝关节处,且与大腿固定连接,使第一驱动单元能够通过第一驱动轮带动第一从动轮,以驱动大腿绕髋关节转轴摆动;第二驱动轮与第一驱动轮并列设置,安装于髋关节转轴上,第二从动轮与第一从动轮并列设置,通过膝关节转轴转动安装在膝关节处,且第二从动轮与小腿固定连接,使第二驱动单元能够通过第二驱动轮带动第二从动轮转动,以驱动小腿绕膝关节转轴摆动,且小腿的摆动方向与大腿的摆动方向相反。籍此,使大腿与小腿的形成差动机构,大腿、小腿的不同摆动组成腿部的运动,实现腿部运动时的动力补偿,有效降低驱动单元的输出力矩。
附图说明
18.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。其中:
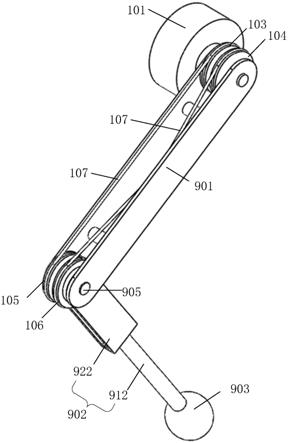
19.图1为根据本技术的一些实施例提供的基于差动机构的机器人腿部的一结构示意图;
20.图2为根据本技术的一些实施例提供的基于差动机构的机器人腿部的剖视示意图;
21.图3为根据本技术的一些实施例提供的基于差动机构的机器人腿部的髋关节处的结构示意图;
22.图4为根据本技术的一些实施例提供的基于差动机构的机器人腿部的膝关节处的结构示意图;
23.图5为根据本技术的一些实施例提供的基于差动机构的机器人腿部的传动结构示意图。
24.附图标记说明:
25.101
‑
第一驱动单元;102
‑
第二驱动单元;103
‑
第一驱动轮;104
‑ꢀ
第二驱动轮;105
‑
第一从动轮;106
‑
第二从动轮;107
‑
第一传动钢丝绳;108
‑
第二传动钢丝绳;
26.901
‑
大腿;911
‑
固定板;921
‑
连接件;902
‑
小腿;912
‑
u型结构;922
‑
连接杆;903
‑
足部;904
‑
髋关节转轴;905
‑
膝关节转轴。
901绕髋关节转轴904逆时针摆动时,小腿902绕膝关节转轴905顺时针摆动,此时,大腿901与小腿902具有相对伸展的趋势;大腿 901绕髋关节转轴904顺时针摆动时,小腿902绕膝关节转轴905逆时针摆动,此时,大腿901与小腿902具有相对折合的趋势。大腿 901与小腿902的相反方向的摆动,使得大腿901与小腿902组成了差动机构;大腿901与小腿902的不同的摆动组合成腿部运动后,能够实现腿部运动时的动力补偿,有效降低驱动单元的输出力矩。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
33.在一些可选实施例中,所述第二驱动轮104和所述第二从动轮 106通过第二传动钢丝绳108传动连接,且所述第二驱动轮104和所述第二从动轮106的转动方向相反。进一步的,所述第二传动钢丝绳 108以∞形式绕于所述第二驱动轮104和所述第二从动轮106上。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
34.在本技术实施例中,通过第二传动钢丝绳108将第二驱动单元 102的输出动力由第二驱动轮104传输至第二从动轮106,实现第二驱动单元102的动力传输。第二钢丝绳以∞形式绕于第二驱动轮104 和第二从动轮106上,使第二驱动轮104和第二从动轮106转动方向相反,即第二驱动单元102的输出动力的扭矩方向与第二从动轮106 的转动方向相反,能够实现第二驱动单元102动力输出的灵活调整,有利于实现腿部运动的动力补偿,使第一驱动单元101和第二驱动单元102的输出动力相互补偿,共同驱动大腿901与小腿902的于东,籍以能够以较小的输出力矩驱动较大的负载。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
35.在一些可选实施例中,所述第一驱动轮103和所述第一从动轮 105通过第一传动钢丝绳107传动连接,且所述第一驱动轮103和所述第一从动轮105的转动方向相同。籍此,有效的实现了第一驱动单元101的动力传输,且能够与第二驱动单元102相配合实现动力的相互补偿,有效降低第一驱动单元101、第二驱动单元102的输出力矩。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
36.在本技术实施例中,第一传动钢丝绳107也可以以∞形式绕于第一驱动轮103和第一从动轮105上,使第一驱动轮103与第一从动轮105的转动方向相反;而第二传动钢丝绳108绕于第二驱动轮104与第二从动轮106上,使第二驱动轮104和第二从动轮106的传动方向相同。籍此,同样可以使得大腿901与小腿902组成差动机构;大腿 901与小腿902的不同的摆动组合成腿部运动后,第一驱动单元101 第二驱动单元102相配合实现动力的相互补偿,有效降低驱动单元的输出力矩。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
37.在一些可选实施例中,所述第二驱动轮104与所述髋关节转轴 904一体成型;和/或,所述第二从动轮106与所述小腿902一体成型。进一步的,所述第一从动轮105与所述大腿901一体成型。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
38.在本技术实施例中,第二驱动轮104与髋关节转轴904固定连接 (比如,平键、楔形键等),髋关节转轴904转动安装于髋关节处,通过将第二驱动轮104与髋关节转轴904设计为一体成型结构,使第二驱动轮104和髋关节转轴904组成轮轴形态,有效的提高了第二驱动轮104和髋关节转轴904的结构力学性能。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
39.在本技术实施例中,第二从动轮106转动安装在膝关节转轴905 上,膝关节转轴
905转动安装于膝关节处,第二从动轮106与小腿 902固定连接(比如,栓接、铆接、焊接等),实现小腿902绕膝关节转轴905的摆动。通过将第二从动轮106与小腿902设计为一体成型结构,可以有效的提高小腿902和第二从动轮106的结构力学性能。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
40.在本技术实施例中,大腿901可以由相互并列的两个固定板911 组成,固定板911的形状可以根据器人的腿部设计进行适配,比如,固定板911可以为腰形、矩形等。固定板911的两端均设有安装孔,一端的安装孔与髋关节转轴904相适配,用于安装髋关节转轴904,另一端的安装孔与膝关节转轴905相适配,用于安装膝关节转轴905。在两个固定板911之间,第一驱动轮103和第二驱动轮104通过髋关节转轴904与固定板911转动连接,第一从动轮105和第二从动轮 106通过膝关节转轴905与固定板911转动连接。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
41.在本技术实施例中,第二驱动轮104与髋关节转轴904一体成型组成轮轴形态,轮轴的轴部转动安装第一驱动轮103,轮轴的两端分别转动安装在两固定板911的安装孔内。第一驱动轮103转动安装于髋关节转轴904上,第一从动轮105与固定板911中的一个一体成型,且位于固定板911的内侧(即两固定板911之间),设有第一从动轮 105的固定板911的一端的安装孔的轴线与第一从动轮105的轴线重合,膝关节转轴905的两端分别转动安装在膝关节处两固定板911的安装孔中,第二从动轮106转动安装在膝关节转轴905上,且位于两固定板911之间。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
42.在本技术实施例中,在大腿901的两固定板911之间通过连接件921连接,使大腿901的各部分结构成为一体,以加强两固定板911 的结构力学性能。连接件921可以设有多个,多个连接件921并列设置在两固定板911之间,可以呈线性分布,也可以呈矩形分布。需要说明的是,在设置连接件921的过程中,应避免与第一传动钢丝绳 107、第二传动钢丝绳108的干涉。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
43.在一些可选实施例中,所述第一驱动单元101和/或所述第二驱动单元102位于所述髋关节处。籍此,有效的降低腿部的机构冗余,降低腿部运动时的运动惯量,使机器人的运动更加平稳,提高机器人的控制精度。同时,还可以降低第一驱动单元101的输出力矩,使第一驱动单元101的可以采用更小的尺寸,或者,相同尺寸的第一驱动单元101更有利于机器人的腿部运动。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
44.在一具体的例子中,所述第一驱动单元101和所述第二驱动单元 102均为无框电机。进一步的,所述第一驱动单元101和所述第二驱动单元102叠套同轴安装。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
45.在本技术实施例中,利用两个无框电机进行套装,可以在有限的空间安装,机构更加紧凑;同时由于无框电机没有外壳,因而有效的降低了整机重量。两个无框电机均安装在髋关节处,有效降低了机器人运动时的运动惯量,使机器人的运动更加平稳。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
46.在本技术实施例中,第二驱动单元102固定安装在大腿901的固定板911的外侧,输出端与第二驱动轮104连接,以驱动小腿902绕膝关节转轴905摆动;第一驱动单元101与第二驱动单元102叠套同轴安装,位于大腿901的固定板911的外侧,输出端与第一驱动轮 103
连接,以驱动大腿901绕髋关节转轴904摆动。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
47.在本技术实施例中,第一驱动单元101和第二驱动单元102均可以为直流伺服电机,在结构形式上,第一驱动单元101可以为无框形态,第二驱动单元102可以为无框形态,也可以为其它形态;第二驱动单元102叠套同轴安装于第一驱动单元101中。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
48.在另一具体的例子中,第一驱动单元101和第二驱动单元102也可以采用对顶安装的方式,即第一驱动单元101和第二驱动单元102 分别安装在大腿901的两个固定板的外侧。此时,第一驱动单元101 和第二驱动单元102均可以采用有框电机的形式。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
49.本技术实施例还提供一种四足机器人,包括:前肢和后肢,所述前肢和所述后肢沿所述机器人的前后方向连接于所述机器人的躯干上,所述前肢和所述后肢分别具有两个上述任一实施例所述的基于差动机构的机器人腿部,所述前肢的两个所述腿部、所述后肢的两个所述腿部均分别沿所述机器人的左右方向对称布置在所述机器人的躯干两侧。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
50.在本技术实施例中,机器人的运动方向定义为机器人的前后反向,机器人的躯干沿前后方向延伸,躯干与腿部的连接处为机器人的髋关节。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
51.在本技术实施例中,小腿902与大腿901的连接处为膝关节,小腿902与大腿901连接的一端为u型结构912,u型结构912的开口端与第一从动轮105固定连接,比如,u型结构912的开口端的两侧板之间设置第一从动轮105(比如,焊接、铆接、一体成型等),在u 型结构912上设膝关节转轴905的安装孔,膝关节转轴905的安装孔贯穿u型结构912的两侧板以及第一从动轮105,且第一从动轮105 的轴线与膝关节转轴905的安装孔的轴线重合。u型结构912的底部可以设圆柱形的连接杆922,连接杆922的一端连接于u型结构912 的底部,另一端与机器人的足部903连接。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
52.在本技术实施例中,机器人的足部903结构形态可以根据工况进行适配。比如,足部903为球形,通过弹性材料(比如,橡胶等)制成,籍此,有效的提高机器人足部903的适应性,降低机器人运动过程中的震动等。可以理解的是,以上描述仅为示例性的,本技术实施例对此并不进行限定。
53.以上所述仅为本技术的优选实施例,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

