1.本发明涉及细胞回收领域,更具体地涉及一种细胞回收装置用机器人及采用该细胞回收装置用机器人的细胞回收方法。
背景技术:
2.在细胞回收领域内,需要利用各种容器对所培养的细胞进行回收作业。在现有的大多数情况下,经常需要操作人员手动进行这种回收作业。但是由于在上述作业过程中需要经常更换不同的容器而且需要对操作的时效、每一步骤的严格执行以及操作时的无菌环境有严格要求,因此通过操作人员手动进行上述作业存在作业繁琐、工作量大、要求极高熟练度、作业过程易于出现错误等问题。于是,本技术人设计了采用机器人来进行细胞回收操作的细胞回收装置。然而,在使用机器人的过程中,例如在将培养基或细胞清洗液从一个容器倒入另一个容器时,发现存在着难以充分倾倒的问题。以六轴机器人为例,由于机械臂毕竟不能完全模拟人类那样的灵活动作,即使是在具有六个旋转自由度的情况下,其能够实现的动作范围仍然是有限的,这就导致经常存在着因为能够实现的旋转角度有限,因此难以将倾倒物充分倒出的问题。此外,尤其是在要求操作空间越小越好的细胞回收领域,在狭小空间内配置有大量的构件。在该情况下,即使勉强能够实现旋转角度,也会因为机械臂的运动轨迹中存在障碍物而导致无法灵活操作。在该情况下,需要采用具有更高自由度的冗余机器人来实现更灵活的操作,于是导致设备成本大幅度增加。
技术实现要素:
3.鉴于上述现有技术的缺陷而做出了本发明。本发明的一个目的在于提供一种细胞回收装置用机器人及细胞回收方法,其能够在细胞回收领域内至少部分地节省人工,防止作业过程出现错误,而且通过采用不同保持模式来实现多种保持角度,从而在无需对机器人进行硬件升级的情况下实现更高的操作灵活性。
4.为了实现上述发明目的,本发明采用如下的技术方案。
5.本发明提供了一种如下的细胞回收装置用机器人,其具有位于最终端的终端臂,在所述终端臂的端部具有用于保持被保持物的保持部,该保持部包括多种保持模式,在以不同的保持模式保持所述被保持物时,该终端臂与所述被保持物所成的角度呈大于0度且小于180度的不同角度。
6.优选地,所述保持部包括第一保持模式和第二保持模式这两种保持模式,当以所述第一保持模式保持所述被保持物时,该终端臂与所述被保持物成第一角度,当以所述第二保持模式保持所述被保持物时,该终端臂与所述被保持物所成的角度为第二角度。
7.更优选地,所述第一角度与所述第二角度相差90度。
8.更优选地,所述保持部包括位于不同位置的第一保持部位和第二保持部位,所述第一保持部位和所述第二保持部位分别能够对所述被保持物上的相同部位进行保持,当所述第一保持部位进行保持时处于所述第一保持模式,当所述第二保持部位进行保持时处于
所述第二保持模式。
9.更优选地,所述保持部包括用于与所述被保持物连接的连接销,所述连接销能够与所述被保持物的被保持孔接合在一起,从而使得所述保持部与所述被保持物相对固定。
10.更优选地,所述连接销设置有至少两组,其中一组所述连接销和另一组所述连接销以朝向相对方向的方式突出设置,该两组所述连接销中有一组至少为两颗以上的所述连接销。
11.更优选地,所述连接销设置有两组,每组所述连接销设置有两颗所述连接销。
12.本发明还提供了一种如下的细胞回收方法,包括以下步骤:
13.培养基排出步骤,将培养容器中的培养基排出;
14.清洗步骤,在所述培养容器中倒入细胞清洗液,然后将细胞清洗液排出;
15.剥离步骤,在所述培养容器中倒入细胞剥离液,使所述培养容器中的细胞剥离;
16.酶失活步骤,使所述培养容器中的所述细胞剥离液中的酶失活;
17.回收步骤,将所述培养容器中的细胞排出至细胞回收瓶;以及
18.悬浮步骤,对所述细胞回收瓶中的细胞进行悬浮处理,
19.使用根据以上技术方案中任意一项技术方案所述的细胞回收装置用机器人的倾倒操作来进行以上各步骤中倾倒液体的作业,以上各步骤中需要进行排出的各种容器作为所述被保持物被该细胞回收装置用机器人保持,在所述倾倒操作中,分别在利用所述不同的保持模式保持所述被保持物的状态下,将该被保持物中的液体排出。
20.通过采用上述技术方案,本发明提供了一种如下的细胞回收装置用机器人,其具有位于最终端的终端臂,在终端臂的端部具有用于保持被保持物的保持部,该保持部包括多种保持模式,在以不同的保持模式保持被保持物时,该终端臂与被保持物所成的角度呈大于0度且小于180度的不同角度。这样,该细胞回收装置用机器人能够取代人工作业,在细胞回收领域内节省人工,防止作业过程出现错误;而且,采用上述多种模式保持被保持物能够使得被保持物相对于机器人具有不同的姿态,当在一种姿态下难以获取充分的倾倒效果时,只需更换另一种保持模式,就能够有效调整倾倒时的角度,以利于在细胞回收过程中的倾倒和摇晃等作业。在该情况下,无需采用较高成本的机器人,只需利用常规设备即可实现较灵活的动作。
附图说明
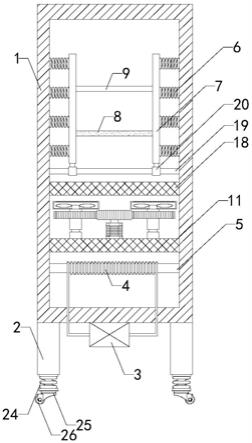
21.图1a和图1b分别是示出了采用根据本发明的机器人的细胞回收装置的主视示意图和俯视示意图,其中省略了安全柜。
22.图2a和图2b分别示出了第一瓶的结构,图2c示出了第一瓶被机器人的保持部保持的状态。
23.图3a和图3b分别示出了第二瓶的结构,图3c示出了第二瓶被机器人的保持部保持的状态。
24.图4a示出了第三瓶的结构,图4b示出了第三瓶被机器人的保持部保持的状态。
25.图5a示出了第四瓶的结构,图5b示出了第四瓶被机器人的保持部保持的状态。
26.图6a和图6b分别是示出了图1a和图1b的细胞回收装置的安全柜的主视示意图和侧视示意图,其中图6a为安全柜的外装示意图,图6b的侧视示意图显示的内装部分。
27.附图标记说明
28.1工作台 1a工作面
29.2置放部件 21容器本体收容部 211固定收容部 212可动收容部22盖置放部 221盖接收构件 222凹部
30.3盖操作部件 31接合爪 311爪部
31.4抽注部件 41抽注头部
32.5机器人51第一臂部51j第一关节52第二臂部52j第二关节53第三臂部53j第三关节54第四臂部541基部542保持部542p连接销
33.6安全柜61柜体62作业台63排气组件631进气口632进气过滤片633风机634排气过滤片635排气口636排气过滤片压差计64测量组件641粒子计数器642聚α烯烃入口侧测量阀65杀菌组件66照明组件67移动调节组件671滚轮672调节机构673支腿68操作显示部
34.c容器c1第一瓶c2第二瓶c3第三瓶c4第四瓶cb容器本体cl盖ch容器本体保持部
35.v上下方向h水平方向。
具体实施方式
36.下面参照附图描述本发明的示例性实施方式。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本发明,而不用于穷举本发明的所有可行的方式,也不用于限制本发明的范围。需要说明的是,在本发明中,“上下方向”是指地球的重力方向(图1a中的上下方向),“水平方向”是在与上述上下方向正交的平面内的水平方向(图1a中的左右方向);另外,“倾斜运动”是指主要利用下述可动收容部使得容器的中心轴线相对于上下方向倾斜一定角度之后保持不动的过程,“击打运动”是指主要利用下述可动收容部使得容器以预定的姿势、在预定时间内、采用预定频率、在预定范围内进行往复运动,使得容器能够实现往复震荡,“摇晃”是指主要利用下述的机器人使容器在一定范围内进行往复摇动、晃动的复合运动过程,在该运动过程中,容器的中心轴线可以是沿着上下方向也可以沿着水平方向,也可以并不沿着固定的某一方向。
37.以下将结合说明书附图说明采用根据本发明的机器人的细胞回收装置的结构。
38.(采用根据本发明的机器人的细胞回收装置的结构)
39.如图1a至图6b所示,采用根据本发明的机器人的细胞回收装置包括安全柜6、设置于安全柜6的外部的控制部(未示出)以及设置于安全柜6的内部的多个容器c、工作台1、置放部件2、盖操作部件3、抽注部件4和机器人5。
40.在本实施方式中,容器c用于容纳细胞回收用的培养基和细胞溶液等流体并能够被机器人5把持而移动到各种位置。如图2a、图2b、图3a、图3b、图4a和图5a所示,各容器c包括均包括形成容纳空间的容器本体cb和用于封住容器本体cb的开口的对应的盖cl以及固定保所述容器本体cb的容器本体保持部ch。具体地,在本实施方式中,容器c被分为第一瓶c1、第二瓶c2、第三瓶c3和第四瓶c4。
41.第一瓶c1为容器本体cb的横截面为正方形且容积为125ml用于容纳细胞清洗液或细胞剥离液的瓶,细胞清洗液例如可以是pbs(磷酸缓冲盐溶液),细胞剥离液例如可以是胰酶。在根据本发明的细胞回收装置工作开始之前,第一瓶c1均一一对应地收容于可动收容部212形成的置放位置,该可动收容部212能够实现绕着沿着上下方向v的轴转动和沿着上
下方向v的线性移位。第一瓶c1的容器本体保持部ch设置有与机器人5的容器保持部54对应的把持部位。
42.第二瓶c2为容器本体cb的横截面为圆形的瓶且容积为500ml,该第二瓶c2的容器本体cb的下半部分形成朝向底面的渐缩形状,第二瓶c2可以为培养容器,例如多层培养容器,用于细胞回收,该第二瓶c2还可以包括有利于细胞溶液集中、流动、分布和回收的其它结构。在根据本发明的细胞回收装置工作开始之前,第二瓶c2可以收容于可动收容部212的置放位置,也可以收容于固定收容部211的置放位置。第二瓶c2的容器本体保持部ch设置有与机器人5的容器保持部54对应的把持部位。
43.第三瓶c3为容器本体cb的横截面为长方形的瓶。在根据本发明的细胞回收装置工作开始之前,第三瓶c3一一对应地收容于固定收容部211的置放位置,从而相对于工作台1固定。第三瓶c3作为培养容器用于存放培养基以及生长的细胞,该细胞将最终被收集到第二瓶c2中。第三瓶c3的容器本体保持部ch设置有与机器人5的容器保持部54对应的把持部位。
44.第四瓶c4为容器本体cb的横截面为正方形的瓶且容积为2000ml。在根据本发明的细胞回收装置工作开始之前,第四瓶c4一一对应地收容于固定收容部211的置放位置,从而相对于工作台1固定。第四瓶c4作为收容排出后的培养基的瓶,所有从第三瓶c3排出的培养基均回收到盖第四瓶c4中。
45.需要说明的是,上述所有四个瓶c1、c2、c3、c4的容器本体保持部ch可以为专用的树脂支架,可以人工利用硅橡胶绑扎容器本体保持部ch。这样,即使将各瓶倒置,各瓶也不会掉落;另外,由于各瓶c1、c2、c3、c4为塑料制成的,当利用机器人5直接抓取容器本体cb时,存在挠曲从而难以进行盖操作而且容易出现瓶掉落的情况,但是容器本体保持部ch的存在使得能够避免这些情况的出现。
46.在本实施方式中,如图1a和图1b所示,工作台1置于安全柜6内的作业台上。工作台1包括沿着水平方向h延展的工作面1a,在工作面1a上设置有置放部件2、盖操作部件3、抽注部件4和机器人5。
47.具体地,在本实施方式中,置放部件2用于分别置放容器c的容器本体cb和盖cl。置放部件2包括容器本体收容部21和盖置放部22,容器本体收容部21和盖置放部22形成与容器c的容器本体cb和盖cl分别一一对应地的置放位置以及用于暂时存在容器c的暂存位置和使得容器c的容器本体cb进行倾斜运动(通常未接合盖cl)/往复运动(通常接合有盖cl)的倾动/摇动位置。
48.进一步地,容器本体收容部21用于收容对应容器c的容器本体cb并且具有与容器本体cb的截面形状相匹配的收容空间,多个容器本体收容部21在工作台1上以围绕机器人5的方式分布,使得能够尽可能便于机器人5对容器本体收容部21内的容器c进行操作。根据容器本体收容部21是否能够产生相对运动,容器本体收容部21包括固定收容部211以及可动收容部212。
49.固定收容部211以使对应的容器本体cb相对于工作面1a固定的方式保持对应的容器本体cb,在本实施方式中,固定收容部211使对应的容器本体cb的中心轴线相对于工作面1a成直角,也就是该容器本体cb的中心轴线沿着上下方向v。这样,通过固定收容部211收容的容器本体cb的开口始终朝向上下方向v上的上方。固定收容部211形成了上述置放位置和
暂存位置。
50.可动收容部212以使对应的容器本体cb相对于工作面1a能够转动的方式保持对应的容器本体cb。在本实施方式中,用于收容第一瓶c1的可动收容部212能够绕着沿上下方向v延伸的轴进行旋转并且能够沿着上下方向v线性移位,使得第一瓶c1能够处于预定的上下方向v上的不同位置和水平方向h上的不同位置。在需要的情况下,可以使得除了第一瓶c1的其它容器c设置在可动收容部212,使得各容器c能够移动到机器人5对各容器c进行操作的有利位置。另外,可动收容部212还形成了上述倾动/摇动位置,使得通过机器人5移动到该倾动/摇动位置的容器c能够在该可动收容部212进行期望的倾斜运动和/或往复运动。用于形成上述倾动/摇动位置的可动收容部212仅在需要时收容特定的容器c,从而使得容器c的容器本体cb的中心轴线能够相对于水平的工作面1a倾斜,并且/或者使得容器c进行预定范围的往复运动,促进容器c内的溶液均匀混合和分布。
51.进一步地,盖置放部22用于置放从容器c拧下的盖cl,从而形成用于置放盖cl的置放位置。在本实施方式中,盖置放部22具有能够被所述机器人抓取的盖接收构件221,盖接收构件221形成有多个与各盖cl的形状相匹配的凹部222,使得凹部222能够收容对应的盖cl,每个凹部222对应一个盖cl的置放位置。盖接收构件221能够被机器人5从工作台1上移动到盖操作部件3处并使得盖接收构件221上的对应的凹部222与盖操作部件3拧下的盖cl对准,从而将盖cl置放在凹部222中。另外,盖接收构件221能够被机器人5从工作台1上移动到盖操作部件3处并使得盖接收构件221上置放的盖cl与盖操作部件3对准,从而使得盖操作部件3与盖cl接合并随后将盖cl拧在对应的容器本体cb上。
52.在本实施方式中,盖操作部件3用于操作不同的容器c的盖cl以实现盖cl与对应的容器本体cb的接合作业和分离作业。盖操作部件3包括能够与容器c的盖cl接合且能够绕着上下方向v双向旋转的接合爪31,接合爪31包括在盖cl的周向上均匀分布的三个爪部311,使得接合爪31能够将容器c的盖cl拧紧/拧下。当接合爪31从外侧与容器c的安装于容器本体cb的盖cl接合之后,接合爪31朝向一个方向转动能够将盖cl从容器本体cb拧下,从而使得盖cl与容器本体cb分离;反之,接合爪31能够使得盖cl与容器本体cb接合在一起,从而封住容器本体cb的开口。
53.此外,盖操作部件3还具有能够检测所述容器c是否为盖着盖cl的状态的盖状态检测器(图中未示出),盖状态检测器可以是光学传感器。在下述的细胞回收方法中,在所有涉及盖cl的接合作业或分离作业的操作后,均利用盖状态检测器进行检测,来确定盖cl是否与容器本体cb确实地接合和分离。当检测到未处于预期状态时,控制部会控制蜂鸣器发出警报,并暂停作业。
54.另外,在盖操作部件3中,可以设置有用于夹持容器c的容器本体cb的夹持组件,夹持组件包括能够相互接近和远离的两个夹持部,从而能够利用两个夹持部固定保持容器c的容器本体cb,使得容器本体cb相对固定。这样,在利用盖操作部件3对容器c的盖cl操作使得盖cl与容器本体cb接合和分离的过程中,容器本体cb不会随着盖操作部件3的接合爪31的操作而自由转动。此外,接合爪31的内周壁可以形成有具有两种以上内径尺寸的接合部位,使得接合爪31能够与直径范围不同的盖cl接合,从而能够把持直径尺寸范围不同的盖cl。例如当接合爪31的内周壁的接合部位形成5cm和7cm的内径尺寸时,可以接合5cm至6cm直径的盖cl并且还可以接合7cm至8cm直径的盖cl。当然,只要是这种具有不同内径尺寸的
设计即可,具体所适用的尺寸范围可以根据具体需求来适当调整。
55.在本实施方式中,抽注部件4具有组装在一起的(50ml)移液管、硅管、玻璃注射器。移液管用于伸入容器本体cb直接对容器本体cb内的溶液实现吸入作业和吐出作业。硅管位于移液管和玻璃注射器之间且具有一定的柔韧性,而且起到气密连接该移液管和玻璃注射器的作用,从而在移液管在上下方向v上移动时不会因连接部分无法变形而使移动受到阻碍。移液管和硅管都是一次性使用。玻璃注射器能够起到活塞作用,以为吸入作业和吐出作业提供动力。这样,抽注部件4用于使得回收到第二瓶c2中的细胞溶液中的细胞实现悬浮处理(使细胞分散/均匀化/悬浮)。抽注部件4以不同的定量从容器c的容器本体cb吸入溶液(吸入作业)或者向容器c的容器本体cb的内部吐出溶液(吐出作业)来实现上述悬浮处理。
56.在本实施方式中,机器人5的机械结构具有六个自由度,用于移动容器c的容器本体cb、盖接收构件221。机器人5包括顺次相连的多个臂部51、52、53、54,其中作为终端臂的第四臂部54的端部的容器保持部542能够以与容器c成至少两种相对姿态(对应第一保持模式和第二保持模式)的方式保持容器c,当容器保持部542以第一保持模式保持容器c时,该第四臂部54的保持部542与容器c的容器本体cb的中心轴线成第一角度,当容器保持部542以第二保持模式保持容器c时,该第四臂部54的保持部542与所述容器c的容器本体cb的中心轴线所成的角度为第二角度,第一角度与第二角度的差值可以是大于0度且小于180度中的任意数值,从而带动容器c进行预定的运动(线性移位运动和摇晃)。第四臂部54具有沿着第一方向延伸的基部541和沿着与第一方向正交的第二方向延伸的保持部542,基部541和保持部542固定连接在一起,基部541与下述第三臂部53相连,保持部542用于保持容器c。保持部542能够以使得容器c的中心轴线与第一方向一致或者与第二方向一致的方式保持容器c,从而实现分别在第一保持模式和第二保持模式下经由容器本体保持部ch保持容器c,这时第一角度和第二角度的差值为90度。在容器c的中心轴线与第一方向一致的情况下(例如如图2c、图3c、图4b和图5b所示),机器人5主要使得容器c以开口向上的姿势进行线性平移,也就是说用于使得容器c在不同的位置之间移动。在容器c的中线轴线与第一方向一致和与第二方向一致的情况下,机器人5能够使得容器c开口相对于上下方向v倾斜任意角度从而倾倒容器本体cb内的溶液或者能够在保持容器c的情况下摇晃容器c从而使得容器c内的溶液混合均匀。这样,利用两种相对姿势倾倒容器c内的溶液的情况下,相当于以不同的角度保持着容器c,当在第一保持模式下,因机器人5的机械臂的自由度所限,或者因机械臂实现某种倾倒角度和位置时,其移动轨迹中存在障碍物,导致无法在第一保持模式下完全倒完的情况下,就可在以第一保持模式进行尽量倾倒之后,再改为以第二保持模式进行保持,再次进行倾倒,于是便能够获取充分的倾倒角度和动作灵活性,能够使得容器c内的溶液被倾倒地更彻底防止有过多的溶液残留;利用两种相对姿势摇动容器c能够使得容器c内的溶液混合更均匀。另外,在本实施方式中,保持部542包括位于不同位置的第一保持部位和第二保持部位,第一保持部位和第二保持部位分别能够对容器c上的相同部位进行保持,当第一保持部位进行保持时处于上述第一保持模式,当第二保持部位进行保持时处于上述第二保持模式。另外,保持部542包括用于与容器c连接的连接销542p,从而经由连接销542p利用夹持方式保持容器c,连接销542p能够与容器c的预先设定的被保持孔接合在一起,从而使得保持部542与容器c相对固定。在本实施方式中,连接销542p设置有两组,每组连接销542p设置有两颗连接销542p,一组连接销542p和另一组连接销542p以朝向相对方向的方式
突出设置。这样,即使每组连接销542p中的一个连接销542p由于意外而出现接合问题,该组连接销542p中的另一个连接销542p也能够保证实现确实地把持容器c的功能。
57.另外,为实现更大的动作灵活性,无论机械臂是利用第一保持部位来进行保持,还是利用第二保持部位来进行保持,都可分别利用机械臂的正向和反向保持方式来各自实现两种不同的保持姿态。这实质上也相当于实现了更多的保持模式。
58.进一步地,除了第四臂部54,机器人5的多个臂部51、52、53包括一端部设置于细胞回收装置的工作台1的第一臂部51、与第一臂部51相连的第二臂部52、与第二臂部52相连的第三臂部53。第一臂部51沿着上下方向v延伸且能够绕着上下方向v旋转,第二臂部52直线状地延伸且第二臂部52的一端部与第一臂部51的另一端部通过第一关节51j相连,利用第一关节51j使得第二臂部52相对于第一臂部51具有至少一个旋转自由度,第三臂部53直线状地延伸且第三臂部53的一端部与第二臂部52的另一端部通过第二关节52j相连,利用第二关节52j使得第三臂部53相对于第二臂部52具有至少一个旋转自由度,第四臂部54通过第三关节53j与第三臂部53相连,利用第三关节53j使得第四臂部54相对于第三臂部53具有至少一个旋转自由度。更具体地,第一关节51j设置有沿着水平方向h延伸的第一轴,第二臂部52能够绕着第一轴旋转,第二关节52j设置有沿着水平方向h延伸的第二轴,第三臂部53能够绕着第二轴旋转,第三关节53j设置有沿着水平方向h延伸的第三轴,第四臂部54能够绕着第三轴旋转,并且第三臂部53和第四臂部54均能够绕着各自的中心轴线自转。这样,该机器人5能够实现六个自由度的运动。
59.通过采用上述方案,使得机器人5具有六自由度的机械结构,能够以所需的各种姿势保持其它部件,完成容器c的线性移位、转动、倾倒和摇晃等作业。具体地,机器人5能够使得各容器c移动到盖操作部件3,能够使得盖接收构件221的各凹部222与拧下的盖cl对准,能够将各容器c移动到置放位置、暂存位置和倾动位置等,从而能过顺利地完成各种所需的作业。
60.另外,虽然在以上的具体实施方式中说明了保持部542包括位于不同位置的第一保持部位和第二保持部位,第一保持部位和第二保持部位分别能够对容器c上的相同部位进行保持,当第一保持部位进行保持时处于上述第一保持模式,当第二保持部位进行保持时处于上述第二保持模式,但是本发明的机器人不限于此。例如可以采用如下的替代方案。
61.在一种替代方案中,保持部542包括仅一个保持部位,该一个保持部位能够与容器c上不同的被保持部位对应,使得当保持部542的一个保持部位与容器c上的不同的被保持部位接合时能够实现上述第一保持模式和第二保持模式。在这种情况下,上述保持部位可以形成并排布置的两个插入部,上述不同的被保持部位分别形成与两个插入部对应的插入孔,这样插入部与不同的插入孔接合时就能够实现上述第一保持模式和第二保持模式。而且,不同被保持部位可以共用部分插入孔,从而节省加工成本。
62.在另一种替代方案中,保持部542包括仅一个保持部位,容器c包括仅一个被保持部位,该一个保持部位与一个被保持部位能够通过相对运动(例如相对转动)来实现不同的接合状态,使得当保持部542的一个保持部位与容器c上的一个被保持部位接合时就能够实现上述第一保持模式和第二保持模式。在这种情况下,举例而言,上述保持部位可以形成具有截面为一字的棱的插入部,上述被保持部位可以形成与该插入部的一字形状的棱的宽度与长度相对应的十字、米字或更多沿径向辐射形状的插入孔,使得插入部相对于插入孔转
动不同相位时都能够与插入孔确实的接合。这样通过插入部相对于插入孔转动之后接合就能够实现上述第一保持模式和第二保持模式。
63.在本实施方式中,控制部能够按照预定程序控制机器人5对容器c实现各种作业,控制盖操作部件3的接合作业和分离作业,并且能够控制抽注部件4选择性进行吸入作业和吐出作业。虽然在本实施方式中没有明确说明,但是控制部可以包括多个对应的控制单元,这些控制单元用于控制各部件的动作,从而用于按照预定程序完成上述各种作业。
64.在本实施方式中,如图6a和图6b所示,安全柜6用于提供无菌的工作环境,工作台12设置于安全柜6内的可拆卸的作业台62上也可以与作业台62是同一部件。安全柜6包括柜体61、排气组件63、测量组件64、杀菌组件65、照明组件66和移动调节组件67。
65.具体地,在本实施方式中,柜体61具有立方体形状并且内部形成无菌的工作环境,作业台62安装于柜体61的内部且呈水平方式布置。
66.进一步地,在本实施方式中,排气组件63用于使得柜体61的内部与外部连通。排气组件63包括设置于柜体61的进气口631和排气口635、设置于柜体61的位于进气口631处的进气过滤片632(在本实施方式中为两个)、设置于柜体61的位于排气口635处的排气过滤片634(在本实施方式中为一个),从而在柜体61的内外进行气体交换的过程中过滤粉尘和颗粒等。排气组件63还包括设置于排气口635的内侧的风机633,该风机633用于促进柜体61的内部的空气排出到外部。此外,排气组件63还包括用于监控排气过滤片634的压差的排气过滤片压差计636。
67.进一步地,在本实施方式中,测量组件64用于测量柜体61的内部的预定参数。更具体地,测量组件64包括用于测量柜体61内的粉尘和颗粒浓度的粒子计数器641以及用于测量聚α烯烃输入的聚α烯烃入口侧测量阀642,从而能够为使用者提供所需的参数信息。
68.进一步地,在本实施方式中,杀菌组件65设置于柜体61并用于对柜体61的内部进行杀菌处理。具体地,杀菌组件65包括设置在柜体61的侧壁的两个杀菌灯(15瓦),从而能够有效地对柜体61的内部空间进行杀菌。
69.进一步地,在本实施方式中,照明组件66用于对柜体61的内部进行照明。具体地,照明组件66包括设置在柜体61的内部空间的顶部的三个led。
70.进一步地,在本实施方式中,移动调节组件67设置于柜体61的下部,用于移动柜体61以及调节柜体61与地面之间的角度。具体地,移动调节组件67包括多个滚轮671、调节机构672和支腿673。滚轮671有利于柜体61移动时在地面上行进。调节机构672一方面用于支撑柜体61,另一方面用于调节柜体61与地面之间的角度。支腿673放下后能够对柜体61提供支撑作用。
71.进一步地,在本实施方式中,操作显示部68设置于柜体61的外壁,用于提供柜体61内部的参数显示以及输入控制安全柜6的各部件的动作的操作指令等。
72.以上已经说明了采用根据本发明的机器人的细胞回收装置的结构,以下举例说明上述细胞回收装置的自动化工作过程的示例,以下的工作过程的示例全部能够按照预先拟定的程序由根据本发明的细胞回收装置自动完成。
73.(采用根据本发明的机器人的细胞回收装置的工作过程的示例)
74.在采用根据本发明的机器人的细胞回收装置的工作过程中,包括以下步骤:
75.培养基排出步骤,利用机器人5将作为培养容器的第三瓶c3中的培养基排出到第
四瓶c4中,这样在该步骤中第三瓶c3中绝大部分培养基被排出;
76.清洗步骤,利用机器人5在第三瓶c3中倒入在第一瓶c1中存放细胞清洗液,这样能够利用细胞清洗液将残存培养基完全清洗下来,然后将细胞清洗液排出到第四瓶c4中,当向第三瓶c3中倒入细胞清洗液时需要利用可动收容部212将第三瓶c3向一侧进行倾斜以有利于倾倒作业;
77.剥离步骤,利用机器人5在第三瓶c3中倒入在第一瓶c1中存放细胞剥离液,对第三瓶c3中的细胞进行剥离处理,当向第三瓶c3中倒入细胞剥离液时需要利用可动收容部212将第三瓶c3向一侧进行倾斜以有利于倾倒作业;
78.酶失活步骤,例如可以利用图中未示出的加热装置对第三瓶c3进行适当的加热,使第三瓶c3中的细胞剥离液失活,并且第三瓶c3中的细胞不会由于加热而受到影响;
79.回收步骤,利用机器人5将第三瓶c3中的细胞剥离液和细胞排出至作为细胞回收瓶的第二瓶c2中;以及
80.悬浮步骤,利用抽注部件4对第二瓶c2中的细胞进行悬浮处理。
81.进一步地,细胞回收方法在上述回收步骤之后且在上述悬浮步骤之前还包括补充回收步骤。在该补充回收步骤中,在第三瓶c3中倒入细胞清洗液,然后将利用该细胞清洗液洗下的残留细胞倒入第二瓶c2,这样能够尽量充分地将残留在第三瓶c3中的细胞回收到第二瓶c2中。
82.另外,在上述清洗步骤、上述剥离步骤、上述回收步骤和上述补充回收步骤中,均利用机器人5对第三瓶c3进行摇晃操作。摇晃操作是在使第三瓶c3的厚度方向大致沿上下方向的状态下进行的,且在摇晃操作过程中,使培养容器进行至少一次上下颠倒,这种上下颠倒不影响厚度方向大致沿上下方向的状态。在上述回收步骤和上述补充回收步骤中,在由机器人5摇晃操作的中途,可以将第三瓶c3放置到可动收容部212,利用可动收容部212使第三瓶c3进行往复移位,往复移位例如为持续时间为10秒钟以上,速率为每秒钟进行1~2次往复的往复震荡操作,该震荡操作中,在往复加速后骤然停止,以模拟类似击打的效果,能够使第三瓶c3中的细胞充分进入到溶液中,并使得第三瓶c3中的溶液混合充分,从而实现充分的回收。
83.此外,利用机器人5的倾倒操作来进行以上各步骤中倾倒液体的作业,在倾倒操作中,分别在利用第一保持模式和第二保持模式保持容器c的状态下,将容器c中的液体排出。这样,能够尽可能将容器c中的液体完全排出。而且,优选地,在上述所有步骤中,在机器人5的所有操作动作的衔接过程中,设置有使机器人5移动到初始状态的动作。这样,便于设定机器人5进行下一步动作的初始状态并且易于在机器人5出现故障时排除故障。在排除故障之后,下一步动作只需从该动作中所设的初始状态继续向下进行即可。在这里,在机器人5的所有操作动作的衔接过程中均设置有使机器人5移动到初始状态的动作,但也可以只在机器人5的一部分操作动作中设置使机器人5移动到初始状态的动作。另外,在悬浮步骤的大部分时间段内,抽注部件4伸入第二瓶c2中的液体的液面之下进行吸入作业和吐出作业,以实现悬浮处理;在悬浮步骤的最后阶段,使抽注部件4离开中第二瓶c2中的液体的液面,但在空中继续反复进行抽注动作,从而能够将残留在抽注部件4中的细胞完全注入第二瓶c2中。
84.综上,本发明提供了一种新的细胞回收装置,其并不限于上述具体实施方式所列
举的示例。另外,进行如下补充说明。
85.(i)虽然在以上的具体实施方式中说明了工作台1的工作面1a是水平的,但是本发明不限于此,可以根据需要将工作面1a设定为相对于水平面成预定角度。
86.(ii)虽然在以上的具体实施方式中说明了根据本发明的细胞回收装置的安全柜6的结构,但是本发明不限于此,该安全柜6还可以具有所需的电源插座和电源连线,而且柜体61可以包括有利于维护的可拆装结构和有利于观察内部空间的透明结构。
87.(iii)虽然在以上的具体实施方式中说明了根据本发明的细胞回收装置的机器人5具有六个自由度,但是本发明不限于此。该机器人5还可以是具有七个自由度的冗余机器人,而且在利用保持模式的调整而能够实现更灵活的动作的情况下,也可以采用更少自由度的机器人。
88.(iv)虽然在以上的具体实施方式中说明了利用接合爪31来把持盖cl的例子,但盖操作部件3用来把持盖cl的构件并不限于爪的方式,也可以是其他种类的把持部,其他把持部也可以设置能够适应多种把持尺寸范围的多种内径。
89.(v)虽然在以上的具体实施方式中说明了可动收容部212既能够实现模拟击打的往复震荡的运动,也能够倾斜运动的例子,但该可动收容部212也可以是通过不同的构件分别实现各种不同的运动。
90.(vi)虽然在以上的具体实施方式中说明了盖置放部22具有凹部222的例子,但也可以不设置该凹部222,而是将盖cl直接置放在平坦的位置即可。而且用于放置各盖cl的部分既可以是连体的,也可以是分体的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。