1.本实用新型涉及装备保障技术领域,具体涉及一种单兵辅助外骨骼系统。
背景技术:
2.当前世界,为了应对不断变化的军事变革,各国都在研发先进的武器装备。先进的武器装备极大提升了单兵作战能力,这对于士兵的作战带来极大的便利,但同时使得士兵的负重在不断增加,而过大的负重会影响士兵战斗的正常发挥,增大了作战难度。军事外骨骼作为一种新型的武器装备,其对于武警士兵顺利遂行任务将起到很大的帮助。被动式军事外骨骼在武警单兵遂行任务中能够帮助士兵分担一部分武器装备的重量,而且被动式军事外骨骼自身的重量也远远小于主动式外骨骼,不会给士兵带来额外的麻烦;并且在承担重量时被动式外骨骼通过机械装置能够做到重量均衡分配,一方面能够较好匹配和适应士兵在遂行任务时的各种战斗姿态:另一方面能够有效减轻士兵长时间使用武器装备手臂的高负荷,有效提升士兵操作武器装备时的稳定性。但是现有的外骨骼系统结构较为复杂,且成本高。
技术实现要素:
3.为了解决上述问题,本实用新型提出一种结构简单,尺寸可调,舒适灵活,成本低的单兵辅助外骨骼系统。
4.为了实现上述目的,本实用新型是通过以下技术方案来实现的:
5.一种单兵辅助外骨骼系统,包括背部支撑骨架、两个结构相同的且关节自由活动的外骨骼手臂,两个所述外骨骼手臂分别对称连接在所述背部支撑骨架的两侧;
6.所述背部支撑骨架由多节背部支撑件履带式拼接组成且呈人体脊椎型,且多个所述背部支撑件之间根据人体脊椎运动进行微动调节;所述背部支撑骨架的两侧设有可沿背部支撑骨架边缘上下移动的背部托板件和腰部托板件;所述背部托板件在所述腰部托板件的上方;
7.两个所述外骨骼手臂连接在所述背部支撑骨架靠顶部位置,且所述外骨骼手臂上下左右全方位转动。
8.进一步的,多个所述背部支撑件之间通过销子连接并通过销子进行转动达到微动调节。
9.进一步的,所述外骨骼手臂从上至下包括依次连接的肩背连接件、大臂、小臂和腕部件,所述肩背连接件与大臂之间、大臂与小臂之间、小臂与腕部件之间均通过姿态关节锁定件连接;所述肩背连接件与背部支撑件连接。
10.进一步的,所述姿态关节锁定件包括第一姿态关节锁定件、第二姿态关节锁定件和第三姿态关节锁定件;所述第一姿态关节锁定件连接所述大臂和肩背连接件,并带动所述大臂沿上下左右全方位转动;所述第二姿态关节锁定件连接所述大臂和小臂,并带动所述小臂沿上下左右全方位转动;所述第三姿态关节锁定件连接所述小臂和腕部件,并带动
所述腕部件沿上下左右全方位转动。
11.进一步的,所述姿态关节锁定件包括带有内部锁止的锁定件主体、锁定联动轴、锁定齿、旋转轴、连接片和伸缩电机;所述锁定联动轴连接两个所述锁定件主体,并将两个所述锁定件主体之间的空间隔离形成旋转空间;所述锁定联动轴与所述伸缩电机机械连接;所述旋转空间内设有旋转轴,所述连接片的其中一端套设在所述旋转轴上,所述连接片的另一端设有转轴孔,所述大臂、小臂和腕部件通过所述转轴孔连接在所述连接片的另一端并上下全方位转动;所述连接片带动所述大臂、小臂和腕部件在所述旋转轴上沿左右全方位转动;所述锁定齿设置在其中一个所述锁定件主体上,并通过锁定齿与连接片的连接达到锁止;锁定齿与连接片的分开达到解锁。
12.进一步的,所述连接片的上边缘设有与所述锁定齿相互配合的凹槽;所述锁定齿与所述锁定联动轴连接;所述锁定齿与凹槽卡接达到锁定。
13.进一步的,所述腕部件设有启动按钮,所述启动按钮与所述伸缩电机电性连接,所述启动按钮通过控制所述伸缩电机的伸缩使所述锁定齿与连接片的凹槽连接和分离,达到控制所述姿态关节锁定件的内部锁止和放松。
14.进一步的,所述大臂包括大臂上盖和大臂下盖,所述大臂上盖和大臂下盖相互配合形成大臂;所述小臂包括小臂上盖和小臂下盖,所述小臂上盖和小臂下盖相互配合形成小臂。
15.进一步的,所述背部支撑骨架的背面设有连接槽,所述连接槽的两侧连续均匀分布有卡槽,所述背部托板件和腰部托板件插入至所述卡槽中连接;所述背部托板件和腰部托板件在变换卡接在不同卡槽达到上下移动的目的。
16.进一步的,最顶端的所述背部支撑件上、所述背部托板件的末端和腰部托板件的末端均设有固定带连接件。
17.本实用新型单兵辅助外骨骼系统,其有益效果在于:
18.(1)整个外骨骼系统由背部支撑骨架和两个外骨骼手臂组成,结构简单,质量轻,能够增强作战人员的负重能力,使作战装备更加完善。
19.(2)背部支撑骨架呈人体脊椎型,且可跟随运动过程中脊椎的变化而微动调节,使其更加符合人体脊椎。符合人体躯干关节机构自由度的微动式背部支撑骨架,用于对机械手臂承担重量进行均衡分配,使被动式外骨骼更好匹配和适应士兵在遂行任务时的各种战斗姿态。
20.(3)外骨骼手臂的各个关节可根据人体手臂的活动特性沿上下左右全方位自由调节,根据所需要使用的武器装备、战术动作、人体姿态等需求进行自由调节,且能够分担武器装备重量的机械手臂,用于降低士兵长时间使用武器装备作战疲劳。
21.(4)外骨骼手臂中的姿态关节锁定件能够调节姿态稳定,针对常用武器装备使用方法和战术动作,使特定武器装备在使用时稳定性更高,性能更好,更贴合任务实际需求。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前
提下,还可以根据这些附图获得其他的附图。
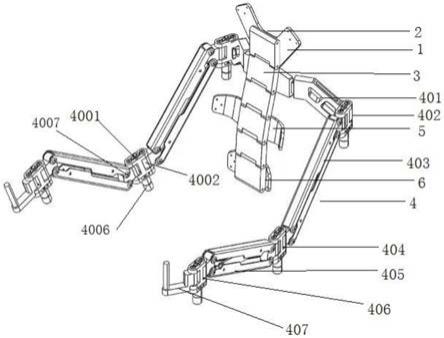
23.图1是本实用新型的结构示意图;
24.图2是姿态关节锁定件的结构示意图(无连接片);
25.图3是姿态关节锁定件的工作状态示意图;
26.图4是背部支撑骨架的侧视图;
27.1固定带连接件,2背部支撑骨架,3背部支撑件,4外骨骼手臂,5背部托板件,6腰部托板件;
28.201连接槽,202卡槽;
29.401肩背连接件,402第一姿态关节锁定件,403大臂,404第二姿态关节锁定件,405小臂,406第三姿态关节锁定件,407腕部件;
30.4001锁定件主体,4002连接片,4003旋转轴,4004锁定联动轴,4005锁定齿,4006伸缩电机,4007转轴孔。
具体实施方式
31.下面结合具体实施例及附图来进一步详细说明本实用新型。
32.实施例1
33.一种单兵辅助外骨骼系统,如图1
‑
图4所示,包括背部支撑骨架2、两个结构相同的且关节自由活动的外骨骼手臂4,两个外骨骼手臂4分别对称连接在背部支撑骨架2的两侧;
34.背部支撑骨架2由多节背部支撑件3履带式拼接组成且呈人体脊椎型,且多个背部支撑件3之间根据人体脊椎运动进行微动调节;背部支撑骨架2的两侧设有可沿背部支撑骨架2边缘上下移动的背部托板件5和腰部托板件6;背部托板件5在所述腰部托板件6的上方;
35.两个外骨骼手臂4连接在背部支撑骨架2靠顶部位置。
36.本实施例中,背部支撑件3为六个,背部支撑件3之间通过销子连接并通过销子进行转动达到微动调节。其结构如常见的手表腕带,多个背部支撑件3之间能够根据人体不同的动作而进行轻微的调整,使其更加适应不同动作下的脊背,贴合度和自由度更好,且起到支撑的作用。
37.背部支撑件3的数量可根据人体高矮程度进行增减调节,相邻两个背部支撑件3之间除了销子连接,还可通过卡接。卡接即在上一个背部支撑件3的一端设有卡孔,下一个背部支撑件3与其相接的一端上设有轴,轴插入至卡孔中进行旋转。
38.另外,背部支撑件3之间的连接不仅限于销接和卡接,也可为其他机械连接方式,能够达到背部支撑件3之间进行微动调节即可。
39.本实施例中,外骨骼手臂4从上至下包括依次连接的肩背连接件401、大臂403、小臂405和腕部件407,肩背连接件401与大臂403之间、大臂403与小臂405之间、小臂405与腕部件407之间均通过姿态关节锁定件连接;肩背连接件401与背部支撑件3连接。
40.肩背连接件401:用于起支撑左肩部,连接左右机械手臂承担负重的作用。
41.大臂403包括大臂上盖和大臂下盖,大臂上盖和大臂下盖相互配合形成大臂;大臂上盖和大臂下盖配合模拟大臂的作用。小臂405包括小臂上盖和小臂下盖,小臂上盖和小臂下盖相互配合形成小臂;小臂上盖和小臂下盖配合模拟小臂的作用。
42.具体的,姿态关节锁定件包括第一姿态关节锁定件402、第二姿态关节锁定件404
和第三姿态关节锁定件406;第一姿态关节锁定件402连接大臂和肩背连接件401,并带动大臂沿上下左右全方位转动;第二姿态关节锁定件404连接大臂403和小臂405,并带动小臂405沿上下左右全方位转动;第三姿态关节锁定件406连接小臂405和腕部件407,并带动腕部件407沿上下左右全方位转动。
43.此外,如图2和图3所示,姿态关节锁定件包括带有内部锁止的锁定件主体4001、锁定联动轴4004、锁定齿4005、旋转轴4003、连接片4002和伸缩电机4006;锁定联动轴4004连接两个锁定件主体4001,并将两个锁定件主体4001之间的空间隔离形成旋转空间;锁定联动轴4004与伸缩电机4006机械连接;旋转空间内设有旋转轴,连接片4002的其中一端套设在旋转轴上,连接片4002的另一端设有转轴孔4007,大臂、小臂和腕部件通过转轴孔4007连接在连接片的另一端并上下全方位转动;连接片带动所述大臂、小臂和腕部件在旋转轴上沿左右全方位转动;锁定齿4005设置在其中一个锁定件主体上,并通过锁定齿4005与连接片的连接达到锁止;锁定齿4005与连接片的分开达到解锁。
44.连接片4002的上边缘设有与锁定齿4005相互配合的凹槽;锁定齿4005与锁定联动轴4004连接;锁定齿4005与凹槽卡接达到锁定。
45.腕部件407主要用于承托操作人手臂和操作机械手臂的运动、固定姿态和解锁姿态。腕部件407设有启动按钮,启动按钮机械控制姿态关节锁定件的内部锁止和放松。而姿态关节锁定件的内部锁止主要是为现有常见的关节锁止机构,能够通过启动按钮的控制,使伸缩电机4006带动向下运行并拉动锁定联动轴4004向下,而锁定联动轴4004与锁定齿4005固定连接,因此锁定齿4005向下移动并与连接片上的凹槽接触连接,锁定齿4005与凹槽相互卡接是连接片锁定,达到对手臂的姿态锁定。再次按下启动按钮后,伸缩电机4006电机向上回收,推动锁定联动轴4004向上运行,锁定齿4005向上移动并与连接片4002上的凹槽分离,解除锁定,达到对手臂姿态的解除锁定。通过姿态关节锁定件提高了外骨骼手臂的稳定性,使其具有较强的机械承重力,稳定性更高,性能更好,更加贴合实际需求。
46.本实施例中,如图4所示,背部支撑骨架2的背面设有连接槽201,连接槽201的两侧连续均匀分布有卡槽202,背部托板件5和腰部托板件6插入至卡槽202中连接;背部托板件5和腰部托板件6变换卡接在不同卡槽202达到上下移动的目的。
47.本实施例中,最顶端的背部支撑件3上、背部托板件5的末端和腰部托板件6的末端均设有固定带连接件1。固定带连接件1用于整个单兵辅助外骨骼系统的背带安装固定,主要作用是将整个外骨骼系统固定在身上。
48.本实施例中,将单兵辅助外骨骼系统将背带通过固定带连接件1固定在身上,左右外骨骼手臂4自然贴合手臂外侧固定,通过手臂的不同姿势动作带动左右外骨骼手臂4进行不同位置的调整。当调整到特定姿势时,则启动腕部件407上的启动按钮,保持姿势稳定,用于机械承重。
49.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

